
Robotid on automaatsed elektromehaanilised seadmed, mis sarnanevad inimestele või loomadele ja mida juhitakse elektroonilise vooluringi või arvutiprogrammi abil. Robotid, mida kasutatakse, on erinevat tüüpi erinevat tüüpi rakendusi . Robottehnoloogia hiljutised suundumused on arendanud arenenud roboteid, näiteks kirurgilised robotid on kaugmanipulaatorid, mida kasutatakse operatsioonide (eriti võtmeaugu operatsiooni) jaoks, jalutusrobotid, mis on enamasti mitme jalaga ja mis on võimelised liikuma, mikrobotid ja nanobotid on mikroskoopilised ja need nano-robotid või nano-seadmed, mida inimkehas kasutatakse haiguste ravimiseks, röövlid on ratastega robotid, mida kasutatakse teistel planeetidel kosmose uurimiseks. Tavaliselt on kosmoserakendustes kasutatavad robotid autonoomsed robotid , modulaarsed ümberkonfigureeritavad robotid või isereguleeritavad modulaarsed robotid jne.
Modulaarsed ümberkonfigureeritavad robotid
Modulaarsed ümberkonfigureeritavad robotid on üldiselt autonoomsed reguleeritava morfoloogiaga kinemaatilised seadmed. Fikseeritud morfoloogiaga robotites on võimalik täita ainult tavapäraseid ülesandeid, nagu käivitamine, tajumine ja juhtimine. Kuid isereguleeritavad robotid või modulaarsed ümberkonfigureeritavad robotid on võimelised oma kuju muutma, korraldades oma osade ühenduvuse ümber nii, et uute olude kohandamiseks, uute ülesannete täitmiseks ja kahjudest taastumiseks.

Modulaarsed ümberkonfigureeritavad robotid
Neid isereguleeruvaid roboteid saab määratleda kui roboteid, mis saavad oma kuju muuta vastavalt läbitavale teele. Näiteks kui robot peab läbima kitsa toru, siis ta konfigureerib end uuesti ussi kujul ja kui ta peab läbima ebaühtlase maastiku, siis ta konfigureerib oma kuju uuesti ämblikuga nagu jalad. Kui on tasane maastik, konfigureerib see end kiireks liikumiseks palli sarnaseks struktuuriks.
Need ümberkonfigureeritavad robotid klassifitseeritakse disaini järgi jällegi kahte tüüpi. Nagu homogeensed modulaarsed robotisüsteemid koosnevad mitu moodulit sarnase kujundusega, et moodustada nõutava ülesande täitmiseks vajalik struktuur. Heterogeenne modulaarne robot-süsteem koosneb mitmest erineva kujundusega moodulist, millest igaüks täidab konkreetseid funktsioone ja neid kasutatakse vajaliku ülesande täitva struktuuri moodustamiseks.
Ümberkonfigureeritavad robotid kosmoserakendustes
Teiste planeetide uurimise osana lasevad paljud riigid planeetide tingimuste ja omaduste uurimiseks sageli välja mitu satelliiti või kosmosemissiooni. Seega pikaajaliste andmete saamiseks käivitatakse pikaajalised kosmosemissioonid ja need pikaajalised kosmosemissioonid on tavaliselt isekonfigureeritavad süsteemid.
Need isereguleeritavad robotid on võimelised ettenägematutes olukordades toime tulema ja kahjustuste korral ise remonti tegema. Me teame, et kosmosemissioonid on suured ja massiliselt piiratud, seega on kasulik, kui kasutame isekonfigureeritavaid roboteid, mis suudavad täita mitu ülesannet mitu robotit et kumbki täidab ainult ühte kindlat ülesannet.

Kosmoserakendustes kasutatavad robotid
Siiani on inimesed seadnud sammud peale selle, et planeet Maa on ainult kuu. Kusjuures kosmoserakendustes kasutatavaid modulaarseid roboteid käivitatakse paljudel teistel planeetidel. Marsile saadetud rida maandureid, manipulaatoreid, orbiidereid ja röövleid on kuulsad kosmoserakendustes kasutatavad robotid.
Robotmanipulaatorid ja röövlid
Ülesandeid, mida liigendatud robotid täidavad kosmoses, on mitmesuguseid. Aparaadi või seadme kosmoses teenindamise protsessi nimetatakse kosmosega manipuleerimiseks, mille teevad liigendatud robotid. Polybot sobib hästi kosmosejaamade või satelliitide hooldamiseks ja kontrollimiseks. Robotmanipulaatorid projitseeritakse paigutamiseks kosmosesse või teistele planeetidele, et jäljendada inimeste manipuleerimisvõimeid. Tavaliselt on need proovide saamiseks paigutatud vabalennulistele kosmoseaparaatidele või teiste kosmosesõidukite orbiidihäälestusele kosmosesõidukites, planeedimaanduritel ja rööbastel.

Robotmanipulaator
Inimeste liikumisvõimete jäljendamiseks on planeeritud robotitel liikumine planeetidele. Neid paigutatakse sageli maismaaplaneetide pindadele, väikestele päikesesüsteemid , aerobotid (planeedi atmosfäärid), hüdrobotid (jääkihid) ja hüdrobotid (vedelad kihid).
Automatiseeritud disain ja optimeerimine
Modulaarsed ümberkonfigureeritavad robotid või modulaarne robotisüsteem on kombineeritud tarkvaratööriistadega, mis aitavad valida ja kujundada iga konkreetse ülesande täitmiseks parima morfoloogia ja juhtimisstruktuuri. Ehkki paljud selle disaini tunnused sõltuvad prognoositavas tulevikus vältimatult inimese intelligentsusest, nõustuvad teised tunnused automatiseeritud kujunduse ja optimeerimisega. Kõik kosmoserakendustes kasutatavad ümberkonfigureeritavad robotid peavad olema konstrueeritud nii, et suudaksid ellu jääda stardipingete, ruumis oleva kiirguse, vaakumi, planeetide jaotuse ja planeedi (planeedi, millel kasutatakse ümberseadistatavaid roboteid või sihtplaneetidel) keskkonnas.
Ümberkonfigureeritavate robotite disainilahendusi on kahte tüüpi: need on võrgupõhised ja ketil põhinevad kujundused.

Meeste ümberkonfigureeritava roboti võrepõhised kujundused
Võrepõhistes konstruktsioonides on ümberseadistamine lihtne, kuid liikumist on raske genereerida ning see konstruktsioon nõuab rohkem ühenduste ja ajamite arvu.

Ümberkonfigureeritava roboti ahelapõhised kujundused
Ahelapõhistes kujundustes on ümberseadistamine keeruline ja ebapiisava jäikusega, kuid liikumist on lihtne genereerida.
Modulaarne ümberseadistatav robotimulatsioon
Füüsikal põhinev tarkvara simulatsioonikeskkond töötati välja C ++ abil, mis hõlbustab kasutajatel ümberseadistatavate robotite ehitamist, kasutades mitmesuguseid mooduleid. Simulatsiooni laiendamiseks lisatakse täiendavad moodulitüübid koos ühilduvate pistikutega.
Praktiline näide isereguleeritavast moodulrobotist

Modulaarne trafo moodul
Moodultrafo on üks sageli kasutatavatest ümberkonfigureeritavatest robotitest ja neid M-TRAN-mooduleid kasutatakse 3-D struktuuri moodustamiseks (mis suudab muuta oma konfiguratsiooni ja võimeline genereerima ka väikseid roboteid), multi-DOF robotiks (mis paindlikult lokomoodid), ja moondega robot. See modulaarne trafo koosneb kahest ajamist ja akust.

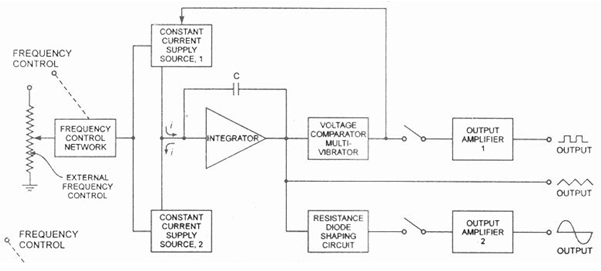
M-TRAN mooduli sisemine skeem
M-TRAN mooduli sisemine plokkskeem koosneb liitiumioonakuist, mittelineaarsest vedrust, toiteallikast, peaprotsessorist, kiirendusandurist, püsimagnetist, SMA mähisest, ühendusplaadist ja PIC-ist.
Neid ümberseadistatavaid roboteid kasutatakse kosmoserakendustes selliste konkreetsete eesmärkide saavutamiseks nagu telekommunikatsiooni pakkumine, üle maa jälgimine andmete tagastamiseks, sõjaline teostatavus ja navigeerimise eesmärgil .
On palju muid robotipõhiseid projekte ja rakendusi:
- Ultraheli Takistustega tajutav robotsõiduk
- Robotiga sõidukite liikumine mobiiltelefoni abil
- Robotiga sõiduk, mida juhib teleripult
- Robotiga sõiduki liikumise jälgimine
- Tuletõrjerobot
- Hääljuhitav robotsõiduk
- Valige N-koha robot Juhtib Android juhtmevabalt
- Metallidetektori robotsõiduk
- Auto metroo rongi jaam jaamade vahel
- Raadiosagedusega juhitav robotsõiduk
- Puutetundlikul ekraanil põhinev kaugjuhitav robotsõiduk
Loodetavasti annab see artikkel lühiteavet kosmoserakendustes kasutatavate modulaarsete ümberseadistatavate robotite kohta. Lisateavet robotipõhised elektroonikaprojektid võite pöörduda meie poole, postitades oma päringud allpool olevasse kommentaaride jaotisesse.
Foto autorid
- Modulaarsed ümberkonfigureeritavad robotid digitaalseks kogumiseks
- Kosmoserakendustes kasutatavad robotid robotnor
- Robotmanipulaator iccrobotics
- Meeste ümberkonfigureeritava roboti võre põhised kujundused csail.mit
- Ümberkonfigureeritava roboti ahelapõhised kujundused wikimedia
- Trafo moodulmoodul ühik.vöökoht
- M-TRAN mooduli sisemine skeem slidesharecdn










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}