
Tavaliselt kasutavad puldirobotid raadiosagedusahelaid, millel on piiratud tööpiirkonna, piiratud juhtimise ja piiratud sagedusala puudused. Nende puuduste ületamiseks mobiiltelefoniga juhitav maandur kasutatakse robot-sõidukit. See pakub robotjuhtimise, sissetungivabade kontrollerite ja kuni kaksteist juhtimissüsteemi jne eeliseid.
Kuigi võimalused ja välimus sisseehitatud robootika varieeruvad tohutult, jagavad kõik robotid mingisuguse juhtimise korral liikuva, mehaanilise struktuuri omadusi. Robotite juhtimine hõlmab kolme erinevat faasi, milleks on taju, töötlus ja tegevus. Tavaliselt on andurid paigaldatud robotile. Tajumise ja töötlemise teeb rongisisene mikrokontroller ning toiming viiakse läbi mootorite abil.
Mobiiltelefoniga juhitav robotsõiduk Land Rover

Mobiiltelefoniga juhitav Land Roveri robotsõiduk, autor Edgefxkits.com
Selle projekti peamine eesmärk on kontrollida mobiiltelefoni abil robotkäsi, mis on paigaldatud robot-sõidukile. See tagab suure tööulatuse ja tugeva juhtimise jne.
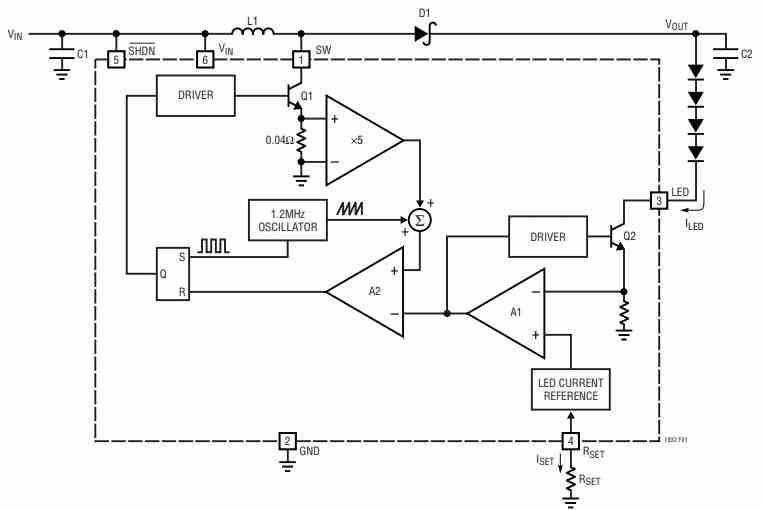
Mobiiltelefoniga käitatava Land Roveri robotsõiduki plokkskeem:

Blokeeri skeem mobiiltelefoniga juhitavast Land Roverist
Peamised ehitusplokid on mikrokontroller, mobiiltelefon, DTMF-dekooder ja alalisvoolumootori-draiveri ahel. Mobiiltelefon on kogu süsteemi kõige olulisem osa, kuna kogu süsteem töötab ja selle aktiveerib mobiiltelefon. DTMF (kahetooniline mitme sagedusega) saab mobiiltelefonilt sisendsignaali ja dekodeerib selle ning genereerib seejärel 4-bitise digitaalse väljundi 8051 mikrokontroller . Kui DTMF-dekooder annab digitaalse väljundi, genereerib see ka katkestuse iga kord.
Mikrokontroller on kogu süsteemi süda, kuna see täidab kõiki kontrollitoiminguid. Mikrokontroller sõltub koodist, mille genereerib DTMF-dekooder, et liikuda mõlemat alalisvoolumootorit pöörates paremale või vasakule ning edasi või tagasi. Alalisvoolumootori draiver saab mikrokontrollerilt madala või kõrge loogika mõttes aktiveerivaid signaale, seejärel võimendab ja pöörab see kahte mootorit mõlemas suunas.
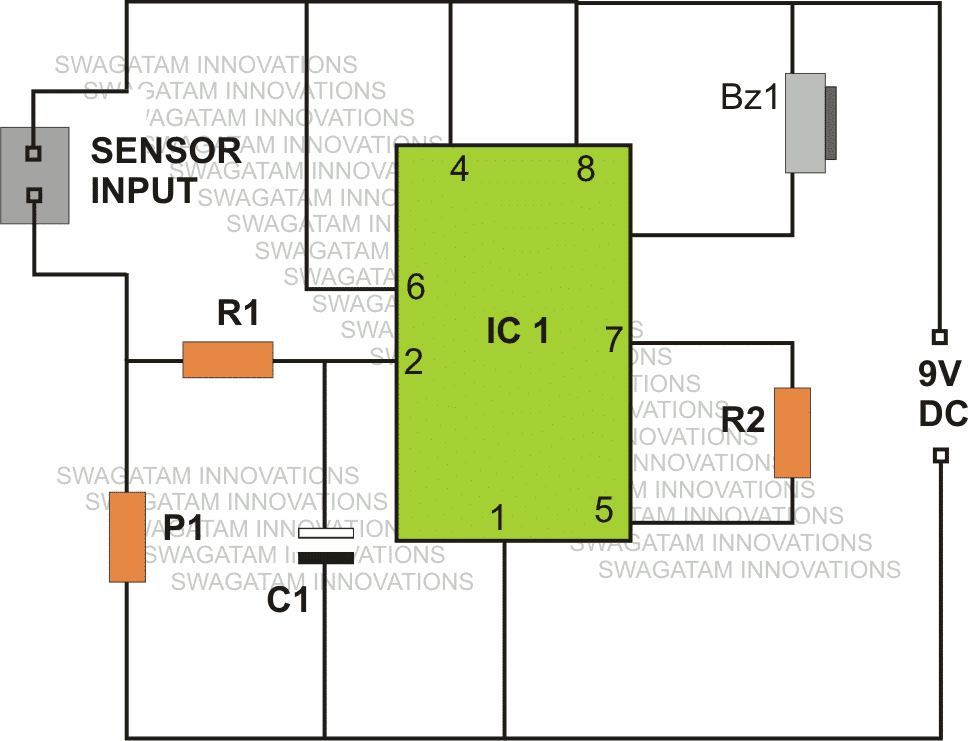
Roboti juhtimine hõlmab peamiselt nelja erinevat faasi: taju, tegevuse töötlemine ja tuvastamine. Tajumise etapis, kui roboti külge kinnitatud mobiiltelefon saab kõne, dekodeerib mobiiltelefoni klahvi vajutamine genereeritud DTMF-tooni. Seejärel võtab dekoodri kiip mobiiltelefonilt helisignaali ja teisendab seejärel DTMF-tooni binaarkoodiks, mis seejärel mikrokontrollerisse suunatakse. Selles projektis kasutatakse MT88710 IC-d DTMF-dekoodrina. Töötlemisetapil töötleb mikrokontroller DTMF-dekooderilt saadud binaarkoodi. The Mikrokontroller on programmeeritud tähega „C” selle konkreetse ülesande täitmiseks vastavalt sisendbittidele.
Tegevusastmel sõltub mootorite pöörlemine mikrokontrolleri sisendist. Landroveri jaoks kasutatakse kahte alalisvoolumootorit, igaüks 30 p / min, ja neid juhib mootori-juhi IC. Lava tuvastamisel ja takistuste tuvastamiseks infrapuna saatja ja vastuvõtja kasutatakse koos summeriga. Kui takistus tuleb roboti ette, edastab infrapunasaatja objektile IR-kiired, seejärel peegeldab objekt IR-kiirte IR-vastuvõtjat. Seejärel võtab IR-vastuvõtja vastu infrapunakiired, et aktiveerida summeri.
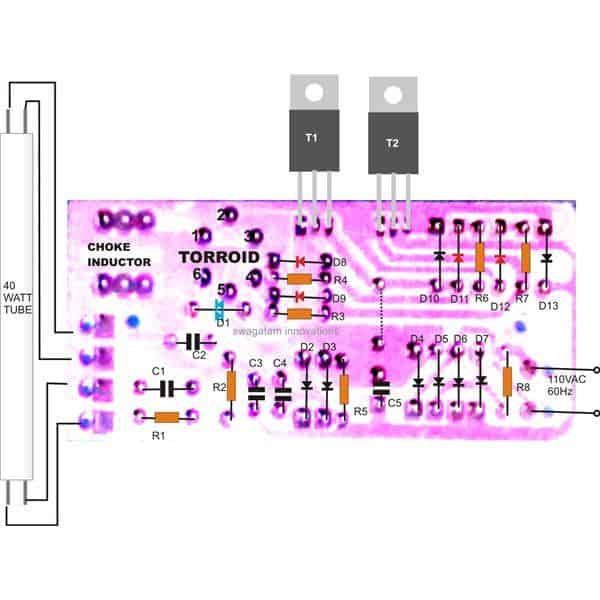
Mobiiltelefoniga käitatava maanduriga robotsõiduki vooluringi skeem:
Selle mobiiltelefoniga juhitava robotlandroveri põhikomponendid on mikrokontroller, mootorijuht ja DTMF-dekooder. Selles projektis kasutatakse MT8870 seeria DTMF-dekoodrit, mis kasutab digitaalseid loendustehnikaid, et tuvastada 16 DTMF-toonipaari 4-bitiseks koodiväljundiks. Sisseehitatud telefonihelilülitus välistab eelfiltreerimise. Kui pin2-le antakse sisendsignaal, tunnistatakse sisendi konfiguratsioon efektiivseks. DTMF-tooni 4-bitine dekodeerimissignaal edastatakse tihvti 11 läbi tihvti 14 väljundi. Need tihvtid on ühendatud mikrokontrolleri tihvtidega Pao, Pa1, Pa2 ja Pa3. Mikrokontrolleri väljund pordi tihvtidest PD0 kuni PD3 ja PD7 suunatakse sisenditesse IN1, IN4 ja see võimaldab mootori-draiveri L293D IC tihvtidel EN1, EN2 aja kaks alalisvoolumootorit .

Mobiiltelefoniga käitatava Land Roveri vooluringi skeem
Selles vooluringis kasutatakse S1 lülitit käsitsi lähtestamiseks. Mikrokontrolleri väljund ei ole alalisvoolumootorite juhtimiseks piisav, seetõttu on mootori pöörlemiseks vajalikud praegused draiverid. L293D mootorijuht on mõeldud kahesuunaliste ajamivoolude pakkumiseks kuni 600 mA pingel 4,5–36 V, mis muudab selle alalisvoolumootorite juhtimine on lihtsam. L293D mootorijuht koosneb neljast juhist. Pistikud IN1 kuni IN4 & OUT1 ja OUT4 on draiveri 1 kaudu draiveri 4 sisend- ja väljundnõelad. Draiverid 1,2,3 ja 4 on lubatud lubamisnõelaga 1 (EN1) ja tihvtiga 9 (EN2). Kui sisend EN1 (pin1) on kõrge, on draiverid 1 ja 2 lubatud. Samamoodi lubab lubamise sisend EN2 (pin9) draiverid 3.
Eelised ja puudused:
Mobiiltelefonilt juhitava robotiga landroveri eeliste hulka kuuluvad traadita juhtimise teenuse pakkumise ja jälgimise süsteem, 3G-tehnoloogial põhinev sõidukis navigeerimine ja piiramatu tööpiirkond, mis põhineb mobiiltelefoni võrgul. Puuduseks on: mobiiltelefoni arveldamise kulud on kõrged mobiilpatareid tühjenevad : tühjenemisprobleem, mis on seotud akudega, kuna akude laadimine väheneb kiire tühjenemise tõttu, kuna koormus on kohanemisvõimeline: süsteem ei ole kõigi mobiiltelefonide jaoks kohanemisvõimeline, kuid neid saab kasutada ainult peakomplektiga.
Seega on see mobiiltelefoni abil töötav robotiprojekt sõjalistes rakendustes sõjaväesõidukite juhtimiseks mobiiltelefoni abil väga kasulik. Tulevikus saame tuvastada vaenlaste positsiooni korraldades a juhtmevaba kaamera landoveri robotsõidukile. See projekt võib olla abiks ka akadeemikutele, kuna õpilased saavad õppida selles projektis pakutavaid erinevaid terminoloogiaid ja põhimõtteid. See projekt aitab õpilastel lisada oma uuenduslikke mõtteid ja ideid arendada robootikaprojekte .
Foto autorid:
- Mobiiltelefoniga opereeritud Land Rover santoshbanisetty
- Mobiiltelefoniga käitatava Land Roveri vooluringi skeem inseneride garaaž





{kind=link}