Vooluringi, mis võimaldab kasutajal ühendatud mootori pöörlemiskiirust lineaarselt kontrollida, pöörates külge kinnitatud potentsiomeetrit, nimetatakse mootori kiiruse regulaatori vooluringiks.
Siin on esitatud 3 alalisvoolumootorite hõlpsasti ehitatavat kiiruse regulaatori vooluahelat, millest üks kasutab MOSFET IRF540, teine IC 555 ja kolmas IC 556, mis hõlmab pöördemomendi töötlemist.
Kujundus nr 1: Mosfeti põhine alalisvoolumootori kiiruse regulaator
Väga laheda ja lihtsa alalisvoolumootori kiiruse regulaatori vooluahela võiks ehitada, kasutades ainult ühte mosfetti, takistit ja potti, nagu allpool näidatud:

BJT Emitteri jälgija kasutamine

Nagu näha, on mosfet varustatud allikajälgijana või tavalise tühjendusrežiimina. Selle konfiguratsiooni kohta lisateabe saamiseks võite viidake sellele postitusele , mis käsitleb BJT versiooni, jääb tööpõhimõte siiski samaks.
Ülaltoodud alalisvoolumootori regulaatori konstruktsioonis loob poti reguleerimine varieeruva potentsiaalse erinevuse mosfeti väravas ja mosfeti allika tihvt lihtsalt järgib selle potentsiaalse erinevuse väärtust ja reguleerib mootori pinget vastavalt sellele.
See tähendab, et allikas jääb värava pingest maha alati 4 või 5 V võrra ja varieerub selle erinevusega üles / alla, pakkudes mootoril muutuvat pinget 2–7 V vahel.
Kui värava pinge on umbes 7 V, annab allika tihvt mootorile minimaalse 2 V, põhjustades mootoril väga aeglast pöörlemist, ja 7 V on saadaval kogu allika tihvti juures, kui potti reguleerimine tekitab kogu 12 V üle värava mosfet.
Siin näeme selgelt, et mosfeti allika tihvt näib väravat 'järgivat' ja seega ka nime allika järgijat.
See juhtub seetõttu, et mosfeti värava ja allika tihvti vahe peab alati olema umbes 5 V, et mosfet saaks optimaalselt juhtida.
Igatahes aitab ülaltoodud konfiguratsioon tagada mootori sujuva kiiruse reguleerimise ja disaini võiks ehitada üsna odavalt.
Mosfeti asemel võiks kasutada ka BJT-d ja tegelikult tooks BJT üle mootori juhtimispiirkonna umbes 1–12 V.
Video demo
https://youtu.be/W762NTuQ19gMootori kiiruse ühtlase ja tõhusa juhtimise osas saab PWM-põhine kontroller ideaalseks võimaluseks. Siit leiate lisateavet lihtsa vooluahela kohta selle toimingu rakendamiseks.
Disain nr 2: PWM alalisvoolumootori juhtimine IC 555-ga
PWM-i kasutava lihtsa mootori kiiruse regulaatori disaini võib mõista järgmiselt:
Esialgu vooluahela toiteallika korral on päästikutihvt loogikas madalas asendis, kuna kondensaator C1 pole laetud.
Ülaltoodud tingimused algatavad võnketsükli, muutes väljundi loogikaks kõrgeks.
Suur väljund sunnib nüüd kondensaatorit D2 kaudu laadima.
Pingetaseme saavutamisel, mis on 2/3 toiteallikast, kinnitage tihvt nr 6, mis on IC-i käivituslävi.
Hetk, kui nööpnõel 6 käivitab, nööpnõel nr 3 ja nööpnõel taastuvad madalale loogikale.
Kui tihvt nr 3 on madalal, alustab C1 taas tühjendamist D1 kaudu ja kui pinge C1 langeb alla taseme, mis on 1/3 toitepingest, muutuvad tihvtid nr 3 ja tihvtid 7 taas kõrgeks, põhjustades tsükli järgimist ja jätkake kordamist.
Huvitav on märkida, et C1-l on kaks diskreetselt seadistatud laadimis- ja tühjenemisprotsessi vastavalt dioodide D1, D2 ja vastavalt potti seatud takistusharude kaudu.
See tähendab, et C1 vastupanuvõimaluste summa laadimise ja tühjendamise ajal jääb samaks, hoolimata sellest, kuidas pott on seatud, seetõttu jääb väljalülitatud impulsi lainepikkus alati samaks.
Kuid kuna laadimis- või tühjendusperioodid sõltuvad nende teekonnal tekkivast takistuse väärtusest, määrab pott diskreetselt need ajaperioodid vastavalt oma kohandustele.
Kuna laadimis- ja tühjenemisperioodid on otseselt seotud väljundi töötsükliga, varieerub see vastavalt poti reguleerimisele, andes vormi väljundis kavandatud erinevatele PWM-impulssidele.
Märgi / ruumi suhte keskmine tulemus annab PWM-väljundi, mis omakorda kontrollib mootori alalisvoolu kiirust.
PWM-impulsid suunatakse mosfeti väravasse, mis reageerib ja juhib ühendatud mootori voolu vastusena poti seadistamisele.
Mootori praegune tase otsustab selle kiiruse ja rakendab poti kaudu kontrollivat efekti.
IC-st väljundi sageduse võib arvutada järgmise valemiga:
F = 1,44 (VR1 * C1)
Mosfeti saab valida vastavalt nõudele või koormusvoolule.
Kavandatud alalisvoolumootori kiiruse regulaatori skeemi on näha allpool:

Prototüüp:

Video testimise tõend:
https://youtu.be/M-F7MWcSiFYÜlaltoodud videoklipist näeme, kuidas IC 555-põhist disaini kasutatakse alalisvoolumootori kiiruse reguleerimiseks. Nagu näete, võib pirn küll PWM-idele reageerides suurepäraselt töötada ja varieerida selle intensiivsust minimaalsest helendusest maksimaalse madalani, kuid mootor mitte.
Mootor ei reageeri esialgu kitsastele PWM-idele, pigem algab jõnksuga pärast seda, kui PWM-id on reguleeritud oluliselt suuremate impulsi laiustega.
See ei tähenda, et vooluringil oleks probleeme, vaid seetõttu, et alalisvoolumootori armatuuri hoitakse tihedalt paari magneti vahel. Stardi alustamiseks peab armatuur hüppama oma pöörde üle magneti kahe pooluse, mida ei saa juhtuda aeglase ja õrna liigutusega. See peab algatama tõukejõuga.
Täpselt seetõttu nõuab mootor PWM-i esialgu suuremat reguleerimist ja kui pöörlemine on algatatud, saab armatuur kineetilise energia ja nüüd on aeglasema kiiruse saavutamine kitsamate PWM-ide abil teostatav.
Siiski võib pööramise vaevalt liikuva aeglase oleku saavutamine olla võimatu samal põhjusel, nagu eespool selgitatud.
Püüdsin kõigest väest paremat reageerimist ja saavutada võimalikult aeglane PWM-juhtimine, tehes esimeses skeemis mõned muudatused, nagu allpool näidatud:

Seda öeldes võiks mootor aeglasemal tasemel paremini juhtida, kui mootor on hammasrataste või rihmaratta süsteemi kaudu koormaga kinnitatud või kinnitatud.
See võib juhtuda, kuna koormus toimib siibrina ja aitab aeglasema kiiruse reguleerimise ajal tagada kontrollitud liikumise.
Kujundus nr 3: IC 556 kasutamine kiirendatud kiiruse juhtimiseks
Alalisvoolumootori kiiruse muutmine võib tunduda, et see pole nii keeruline ja võite leida selle jaoks palju vooluringe.
Kuid need vooluahelad ei taga väiksematel mootori pöörlemiskiirustel ühtlast pöördemomendi taset, muutes selle toimimise üsna ebaefektiivseks.
Veelgi enam, ebapiisava pöördemomendi tõttu väga madalatel pööretel kipub mootor seisma jääma.
Teine tõsine puudus on see, et nende vooluahelatega ei kaasne mootori tagurdamise funktsiooni.
Kavandatud vooluringil pole ülaltoodud puudusi täielikult ning see suudab tekitada ja säilitada kõrgeid pöördemomendi tasemeid ka madalaimal võimalikul kiirusel.
Ahela töö
Enne kavandatava PWM-mootori kontrolleri vooluahela arutamist tahame õppida ka lihtsamat alternatiivi, mis pole nii tõhus. Sellegipoolest võib seda pidada mõistlikult heaks, kui mootori koormus pole suur ja kui kiirust ei vähendata miinimumtasemele.
Joonisel on näidatud, kuidas ühendatud mootori kiiruse reguleerimiseks saab kasutada ühte 556 IC-d, me ei hakka üksikasjadesse laskuma. Selle konfiguratsiooni ainus märkimisväärne puudus on see, et pöördemoment on otseselt proportsionaalne mootori kiirusega.
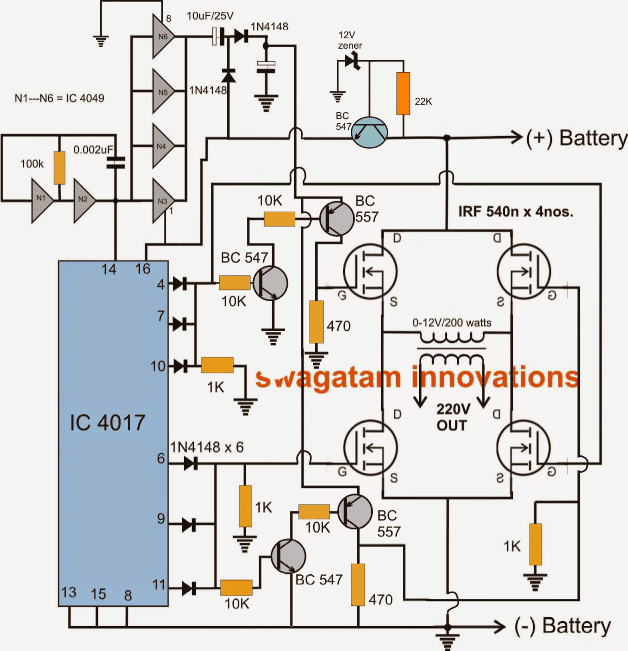
Tulles tagasi kavandatud suure pöördemomendi kiirusega regulaatori vooluahela kujunduse juurde, siis siin oleme kasutanud kahte 555 IC-d ühe või pigem ühe IC 556 asemel, mis sisaldab ühes pakendis kahte 555 IC-d.
Vooluringi skeem

Põhijooned
Lühidalt pakutud Alalisvoolumootori kontroller sisaldab järgmisi huvitavaid funktsioone:
Kiirust saab pidevalt vahetada nullist maksimumini, ilma seiskumisena.
Pöördemomenti ei mõjuta kunagi kiiruse tasemed ja see jääb konstantseks ka minimaalsel kiirusel.
Mootori pöörlemist saab sekundi murdosa jooksul ümber pöörata.
Kiirus on mootori pöörlemise mõlemas suunas muutuv.
Kaks 555 IC-d on määratud kahe eraldi funktsiooniga. Üks sektsioon on konfigureeritav astable multivibraatorina, mis genereerib 100 Hz ruudukujulisi kellasid, mis suunatakse pakendi sees olevasse eelmisesse 555 sektsiooni.
Ülaltoodud sagedus vastutab PWM-i sageduse määramise eest.
Transistorit BC 557 kasutatakse konstantse vooluallikana, mis hoiab külgnevat kondensaatorit kollektorivarras laetud.
See arendab ülaltoodud kondensaatoris saehamba pinget, mida võrreldakse 556 IC sees näidispingega väliselt rakendatud proovipingega.
Väliselt rakendatav proovipinge saab tuletada lihtsast 0–12 V muutuva pingega toiteallikast.
Seda 556 IC-le rakendatavat varieeruvat pinget kasutatakse impulsside PWM muutmiseks väljundis ja seda kasutatakse lõpuks ühendatud mootori kiiruse reguleerimiseks.
Lülitit S1 kasutatakse mootori suuna koheseks muutmiseks, kui see on vajalik.
Osade nimekiri
- R1, R2, R6 = 1K,
- R3 = 150K,
- R4, R5 = 150 oomi,
- R7, R8, R9, R10 = 470 oomi,
- C1 = 0,1 uF,
- C2, C3 = 0,01 uF,
- C4 = 1uF / 25VT1,
- T2 = TIP122,
- T3, T4 = TIP127
- T5 = BC557,
- T6, T7 = BC547,
- D1 --- D4 = 1N5408,
- Z1 = 4V7 400mW
- IC1 = 556,
- S1 = SPDT lüliti
Ülaltoodud vooluring oli inspireeritud järgmisest mootori juhi vooluringist, mis avaldati pikka aega tagasi ajakirjas elecktor electronic India.
Mootori pöördemomendi juhtimine IC 555 abil

Esimest mootori juhtimisskeemi saab palju lihtsustada, kasutades mootori tagasikäigulülitamiseks DPDT-lülitit ja kiiruse reguleerimiseks emitterijälgija transistori kasutamist, nagu allpool näidatud:

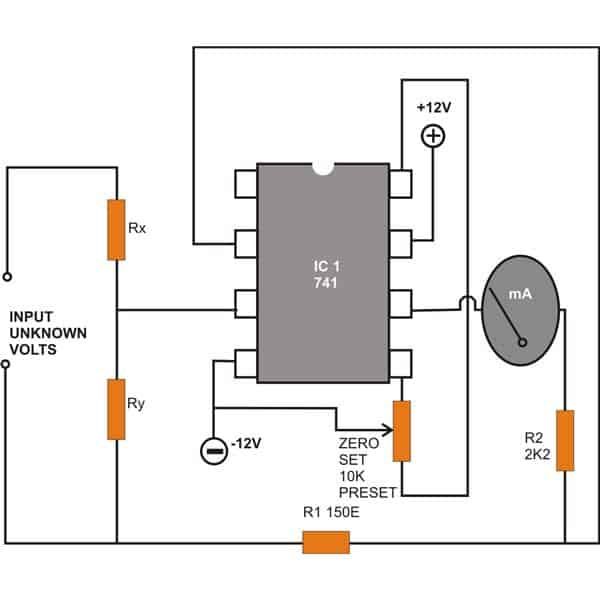
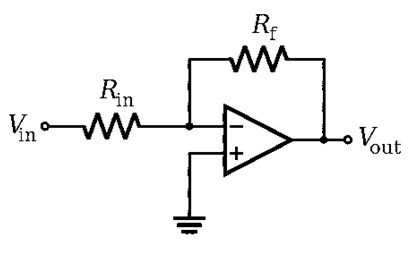
Täppismootori juhtimine ühe opvõimendiga
Alalisvoolu äärmiselt rafineeritud või keerukas juhtimine mootori oleks võimalik saavutada op-amp ja tahhogeneraatori abil. Op-amp on varustatud pingetundliku lülitina. Allpool näidatud vooluahelas lülitatakse transistor sisse ja mootorile antakse 100% võimsust niipea, kui tahhogeneraatori väljund on madalam kui etteantud võrdluspinge.
Opvõimendi ümberlülitamine toimuks vaid paari millivoldiga võrdluspinge ümber. Te vajate topelt toiteallikat, mis võib olla lihtsalt stabiilsem.

See mootoriregulaator võimaldab piiramatult reguleeritavat vahemikku ilma igasuguse mehaanilise probleemita.
Operatsioonivõimendi väljund on ainult +/- 10% toitepiirde tasemest, seega saab kahekordse emitterijälgija abil kontrollida tohutuid mootori kiirusi.
Võrdluspinge saab fikseerida termistoride või LDR-i jne kaudu. Skeemil näidatud eksperimentaalses seadistuses kasutati tahhogeneraatorina RCA 3047A op võimendit ja 0,25 W 6 V mootorit, mis genereeris umbes 4 V 13000 p / min kavandatud tagasiside.
Eelmine: 3 parimat džaulivarga vooluringi Järgmine: survepliidi vilega loenduri ahel