Roboteid saab kasutada paljudes rakendustes tööstuses, sõjaväes, kodumajapidamises. Robotite üks peamisi kasutusviise on inimeste jaoks vara. Sõltumata sellest, kas tegemist on mis tahes ohtlike olukordadega, näiteks tulekahju puhkemisega, või maamiinide täis kohaga, saavad robotid nendest probleemidest hõlpsasti väljapääsu leida. Nii et vaatame neid kahte tüüpi roboteid - maamiin, mis tunneb robotit, ja tuletõrjerobot
Maamiinide tuvastamise robot
Kuidas maamiini robotitega tajuda?
Robootika üks olulisemaid rakendusi on kaitse. Sõjaväe robot on kaugjuhitav sõiduk, millel on palju unikaalseid omadusi. See võib olla luurega kaameraga robot sõiduk, LASER relvaga sihtmärkide tuvastamiseks ja hävitamiseks robot sõiduk või metallidetektor maamiinide olemasolu tuvastamiseks.
Üks traditsioonilistest ja tavapärastest miinide avastamise viisidest on koolitatud personaalide kasutamine, kes otsivad metallidetektori abil käsitsi metalle või miinid. See on aga ohtlik ja kallis ning ka aeglane.
Selle probleemi ületamiseks eelistatakse palju arenenumat süsteemi.
Paar viisi maamiinide avastamiseks:
- Roboti abil, mis võib sisestada maasse sondi, mis suudab tuvastada pinnase all olevad esemed ja määrata materjali tüübi.
- Metalliotsijaga roboti kasutamine, mis suudab tajuda juhtivate elementide nagu maamiinide olemasolu ja häirida kasutajat.
Enne teise tüübi - st metallidetektoriga roboti - üksikasjalikumaks uurimist tuletagem lühidalt meelde kahte olulist mõistet - maamiinid ja metallidetektor.
TO Maamiin on tahtlikult maa alla paigutatud lõhkekeha, mis rõhu mõjul plahvatab. Statistikaaruande kohaselt on kogu maailmas 70 riigis umbes 100 miljonit maamiini. Kord paigutatud maamiin võib töötada kuni 50 aastat. Kas pole ohtlik !!

Põhimetallidetektor töötab faraday induktsiooniseaduse põhimõttel. See koosneb poolist, mis on pingestatud selle ümber pulseeriva magnetvälja arendamiseks. Kui spiraal satub juhtiva elemendi nagu metalli (kaevanduse) lähedusse, indutseeritakse selles elektrivool (pöörisvool). Indutseeritud pöörisvool tekitab metalli ümber elektromagnetvälja, mis edastatakse uuesti spiraalile, mis arendab analüüsitavat elektrisignaali. Suurem on mähise ja metalli vaheline kaugus, nõrgem on magnetväli.
Lihtne prototüüp:

Metallidetektoriga robotsõiduki lihtne prototüüp
Roboti kujundamine:
Robotisõiduk koosneb järgmistest üksustest:
- Ristkülikukujuline alus kogu robotkonstruktsiooni toetamiseks, liikumiseks kinnitatud kahe rattaga.
- Paar alalisvoolumootorit, et tagada robotile vajalik liikumine.
- Juhtimisseade, mis koosneb raadiosagedusevastuvõtjast, mis võtab vastu saatjaseadmelt käsusignaale mootorijuhi juhtimiseks ja mootorite juhtimiseks.
- Kui metall on detekteeritud, käivitatakse metallidetektori vooluahel koos summerihäirega.
Kuidas robot töötab:
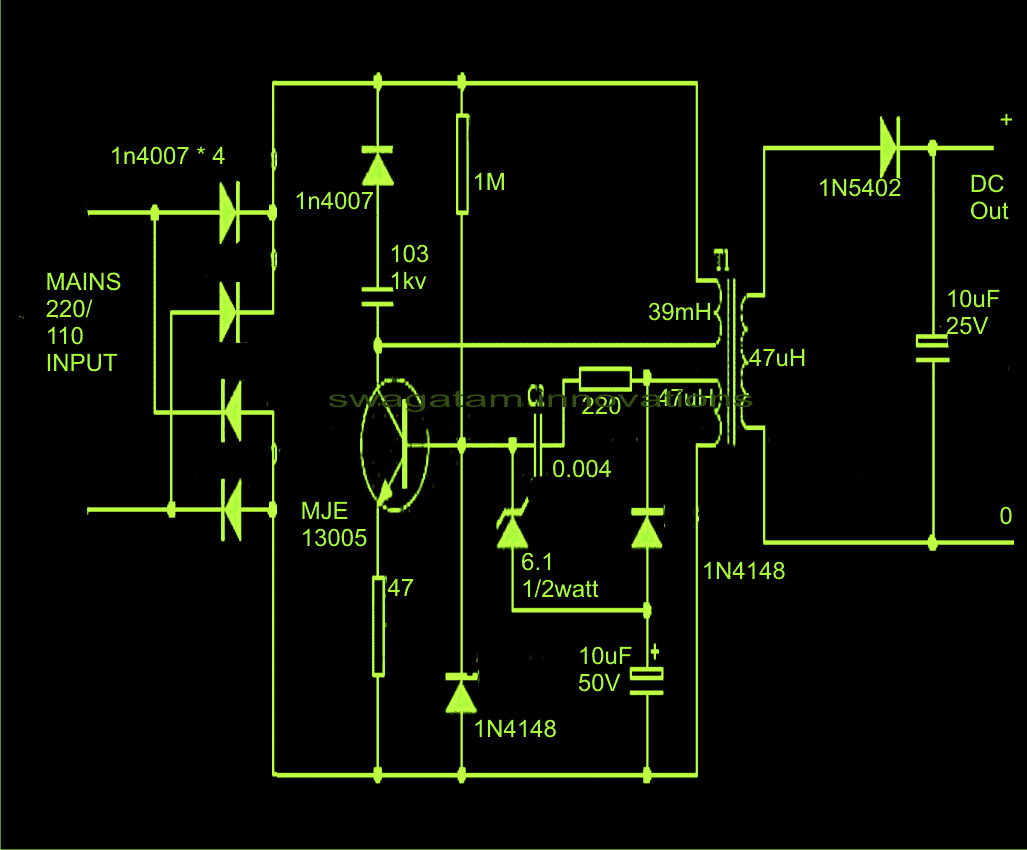
Roboti juhtimisahelasse sisseehitatud metallidetektori vooluring koosneb transistorist, mida juhib mähisest koosnev häälestatud ostsillaatori ahel. Kui tuvastatakse metall ja elektrivool edastatakse mähise kaudu uuesti, on transistor1 seisukorras ja ajab teise transistori2 välja. See transistor3 omakorda ajab teise transistori väljalülitatud olekusse. See konkreetne transistor 3 on ühendatud teise transistoriga 4, mis on ühendatud nii, et see on seisundis, kui selle draiveri transistor3 on välja lülitatud. Transistor 4 on ühendatud selliselt, et seisukorras antakse summerile ja valgusdioodile korralik eelarvamus ning nad hakkavad juhtima.

Metallidetektorploki plokkskeem
LED hakkab põlema ja helisema hakkab. Seega hakkab metalli tuvastamisel helisignaal helisema ja valgusdiood süttib.
Roboti juhtimine:
Lihtsat prototüüpi saab juhtida raadioside abil, mis on lähiside süsteem. Käsklused edastatakse saatja abil ja roboti liikumise juhtimiseks võetakse vastu roboti ahelasse sisseehitatud vastuvõtja poolt.

Saatja sektsiooni plokkskeem
Saatja koosneb nuppude komplektist nagu edasi, tagasi, peatus, vasak ja parem, mida vajutatakse, et robot saaks liikuda soovitud suunas. Nupud on ühendatud mikrokontrolleri sisendporti. Nende signaalide vastuvõtmisel töötav mikrokontroller arendab paralleelselt vastavat 4-bitist signaali üle teise sisend- / väljundpordi, millele on ühendatud kodeerija IC. Kodeerija teisendab need signaalid andmete jadavormiks. RF-saatja moduleerib neid antenni kaudu edastatavaid seeriandmeid.

Vastuvõtja sektsiooni plokkskeem
Robotile paigaldatud vastuvõtjaosa koosneb RF-vastuvõtjast, mis seda signaali demoduleerib. Dekooder IC võtab selle signaali vastu jadavormis ja arendab oma väljundis vastavad 4-bitised paralleelsed andmed. Mikrokontroller võtab need andmed vastu ja annab vastavalt juhtsignaali mootori juhile IC LM293D, mis juhib mõlemat mootorit.
Tuletõrjerobotiga sõiduk:
Mõiste tuletõrjerobotiga sõiduk võitleb tulekahjus. Viimastel aastatel on toimunud mitu tõsist õnnetust, sealhulgas tulekahju ja pommiplahvatusi. Oleme teadnud suurtest tuleõnnetustest, nagu tuumaelektrijaamad, nafta-, gaasimahutid ja keemiatehased. Selle koha suured tuletõrjeettevõtted võivad tulekahju korral väga tõsised olla. Tuhanded rahvad on selle juhtumi tõttu surnud. See on tulekahju kustutamine robot sõiduk tehnoloogia. See robotsõiduk kasutas tulekahju leidmiseks ja tulekahjude eest võitlemiseks.

Tuletõrjerobotiga sõiduk
Tuletõrjerobotiga sõiduki tööpõhimõte:
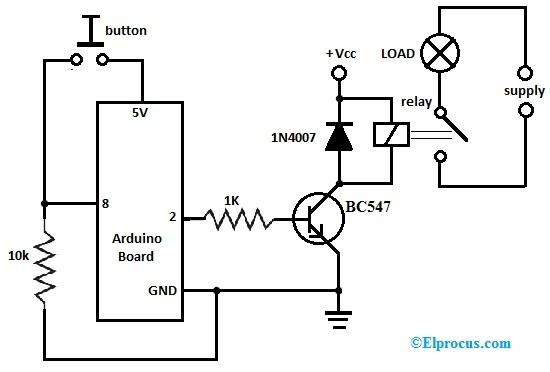
Robotisõiduk laaditi veepaagiga. Pumpa juhib traadita side (raadioside ja mobiilside). Saatja ots on ühendatud nuppudega. Selle nupuvajutuse abil saadetakse robotile vastuvõtja ja juhtimismoodul sarnaselt edasi, tagasi, vasakule, paremale. Vastuvõtva otsa kolm mootorit on ühendatud mikrokontrolleriga.

Saatja plokkskeem

Vastuvõtja plokkskeem
Raadiosaatja töötab raadiosageduse kaugjuhtimispuldina, kui leviala on 200 meetrit. Kodus, kontorites ja tööstuses hoitakse tuleandureid teatud kohtades, kui tulekahjuanduri läheduses toimub tulekahju. Andurid tähendavad, et vastav bitt edastatakse RF-vastuvõtjale. RF-vastuvõtja on integreeritud mikrokontrolleriga. Kui raadiosagedusvastuvõtja võtab vastu signaale, et teave edastatakse mikrokontrollerile, liigub robot tuleandurite suunas. Andurite asukohad salvestatakse mikrokontrollerisse. Kui robot on jõudnud soovitud asukohta, peatub robot ja aktiveerib pihusti sellele tulele. Pärast laskmist läheb robot algasendisse. Kogu vooluahelat juhib mikrokontroller.
Tuletõrjerobotiga sõidukite tüübid:
Avaleht tuletõrjerobotiga sõiduk :
Välitegevus on praeguse Flore of house'i jaoks piiratud. See robot kasutab paljusid majapidamistarbeid süttimiseks, kui keegi magab või on eemal. Seda robotit kasutatakse kodu kindlustamiseks ja seda rakendust kasutades on Flore'is kõik uksed avatud, kuna see sõiduk liigub kodus ühest kohast teise. Tulekustutusala peab olema ohutu, et see ei põhjustaks uut õnnetust. Selle roboti lisafunktsioon on töötamine pika vahemaa tagant.
Tööstuslik tuletõrje:
Enamik tööstusharusid seisavad silmitsi tuleõnnetuste probleemidega, näiteks gaas, bensiin, tuumaelektrijaamad, keemiatööstus tohutult kahju ja rohkem inimesi on ümbruskonna lähedal surnud. Sellel robotil on jõudu kanda tuld põlemispiirkonnas piiramatu veega varustamiseks. Tulekahju põhjustab halvenenud nähtavust, suurt kuumust ja palju muid olukordi, mis võivad põhjustada vigastusi.
Metsatulekahju kustutamine:
Metsatulekahjud on väga ohtlikud. Suure koguse metsa põletamine võib olla lühike aeg. Isegi linna tuletõrjeosakonnad peavad linna ümbritsevas piirkonnas hakkama saama metsatulekahjudega. Mõni aasta tagasi tapeti 1990ndatel umbes 152 tuletõrjujat. Metsatulekahju robootika kasutab tuld ja võitleb tulega. See robot kasutab traadita side eesmärgil välist juhtimisseadet. Moodul on ühendatud väljundotsaga, mida kasutatakse roboti metsatulekahju kustutamiseks. Metsatulekahjuroboti juhtimiseks kasutatakse selliseid rakendusi nagu rõhuandur, temperatuuriandur, suduandur, infrapunaandur.
Kohe!
Kuigi ma olen andnud metallidetektoriga roboti põhiidee, on endiselt suur küsimus - kuidas juhtida robotit ebatasasel maastikul, mis on tundmatu, eriti keskkonnas, kus on tugev vihm, tolm ja kuum temperatuur. Vastuse leidmiseks ja kommentaaride postitamiseks.