
Sissejuhatus:
Tänapäeva paljud tööstusharud kasutavad roboteid nende kõrge jõudluse ja töökindluse tõttu ning see on inimesele suureks abiks. Takistuste vältimise robootikat kasutatakse takistuste tuvastamiseks ja kokkupõrke vältimiseks. See on autonoomne robot. Takistuste vältimise roboti disain nõuab paljude andurite integreerimist vastavalt nende ülesandele.
Takistuste tuvastamine on selle autonoomse roboti esmane nõue. Robot saab teavet ümbritsevast piirkonnast robotile paigaldatud andurite kaudu. Mõned takistuste tuvastamiseks kasutatavad sensorid, nagu muhkeandurid, infrapunaandurid, ultraheliandurid jne. Ultraheliandur on takistuse tuvastamiseks kõige sobivam ning selle hind on madal ja selle võimekus on suur.

Takistuste vältimise robotsõiduk
Tööpõhimõte:
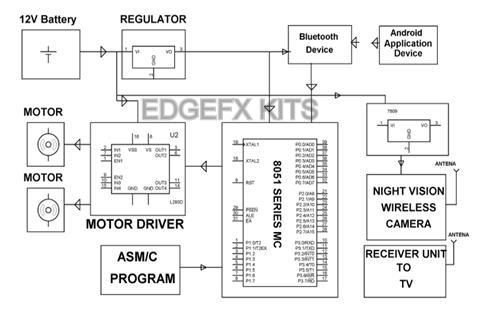
Takistuse vältimine robot sõiduk kasutab oma liikumiseks ultraheli andureid. Soovitud toimingu saavutamiseks kasutatakse 8051 perekonna mikrokontrollerit. Mootorid on ühendatud mootori juhi IC kaudu mikrokontrolleriga. Ultraheliandur on kinnitatud roboti ette.
Alati, kui robot läheb soovitud rada, edastab ultraheliandur ultrahelilaineid pidevalt oma anduripeast. Alati, kui mõni takistus talle ette tuleb, peegelduvad objektilt ultrahelilained ja see teave edastatakse mikrokontrollerile. Mikrokontroller juhib ultraheli signaalide põhjal mootoreid vasakule, paremale, tagaküljele, ette. Iga mootori kiiruse reguleerimiseks kasutatakse impulsi laiuse modulatsiooni (PWM).

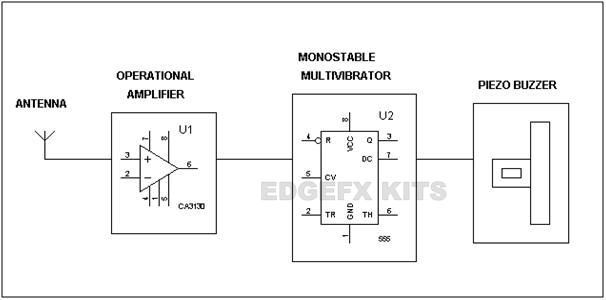
Plokkdiagramm Takistuste vältimine Robot Sõiduk
Erinevad andurid, mida kasutatakse takistuste vältimiseks
1. Takistuse tuvastamine (IR-andur):
IR-andureid kasutatakse takistuste tuvastamiseks. Anduri väljundsignaal saadetakse mikrokontrollerile. Mikrokontroller juhib sõidukit (edasi / tagasi / seisma), kasutades sõidukisse paigutatud alalisvoolumootorit. Kui mõni infrapunaandurisse paigutatud takistus ei suuda valguskiiri vastu võtta, annab see mikrokontrollerile signaale. Mikrokontroller peatab sõiduki kohe ja sireen süttib. Ühe minuti pärast kontrollib robot tee olekut, kui takistus on eemaldatud, liigub robot kaugele, muidu naaseb robot alguskohta liikuma. Andur tuvastab objektid, andes lühikese ultrahelipurske ja kuulates seejärel ökot. Peremeesorganisatsiooni mikrokontrolleri juhtimisel laseb andur lühikese plahvatuse 40 kHz. See plahvatus avaneb õhus või rändab läbi õhu ja tabab artiklit ning põrkab taas anduri juurde. Andur annab hostile väljundimpulsi, mis lõpeb kaja tuvastamisel, seega võtab programm arvutusse ühe impulsi laiuse järgmisele, et anda tulemusi objekti kauguses.
kaks. Tee tuvastamine (lähedusandur):
Tavaline põhjus on see, et nii andurid kui andurid ja robot järgivad seda otse teele. Kui liin sel ajal lõpeb, pöördub robot 180-ga tagasi ja pöörab sama koha tagasi.

On-line olemine
Lähedusandureid kasutatakse tee tuvastamiseks. Kui kõverjoonel parajat sensorit ei tuvastata, aktiveerib mikrokontroller vasakpoolse mootori vasakule pööramiseks kuni parempoolse anduri signaalini. Kui signaal on tuvastatud õige anduriga, aktiveeritakse kaks mootorit edasi liikumiseks. Kui liin sel ajal lõpeb, pöördub robot 180-ga tagasi ja pöörab sama koha tagasi.

Liini kaotamine
3. Ultraheliandur:
Ultraheli andurit kasutatakse takistuste tuvastamiseks. Ultraheliandur edastab ultrahelilaineid oma anduripeast ja võtab uuesti vastu objektilt peegelduvad ultrahelilained.
Paljudes rakendustes kasutatakse ultraheliandureid, näiteks juhisignalisatsioonisüsteeme, automaatseid ukseavajaid jne. Ultrahelisensor on väga kompaktne ja väga suure jõudlusega.

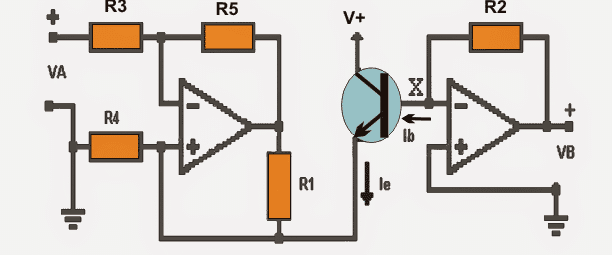
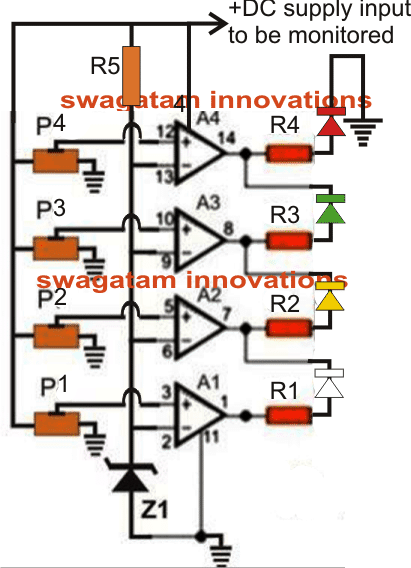
Ultrahelianduri üldskeem
Tööpõhimõte:
Ultraheliandur väljastab lühi- ja kõrgsageduslikku signaali. Need levivad õhus helikiirusel. Kui nad tabavad mõnda objekti, siis peegeldavad nad andurile kajasignaali. Ultraheliandur koosneb alusele kinnitatud multivibraatorist. Multivibraator on resonaatori ja vibraatori kombinatsioon. Resonaator edastab vibratsiooni tekitatud ultraheli laine. Ultraheliandur koosneb kahest osast, mille emitter tekitab 40 kHz helilaine, detektor tuvastab 40 kHz helilaine ja saadab elektrisignaali tagasi mikrokontrollerile.

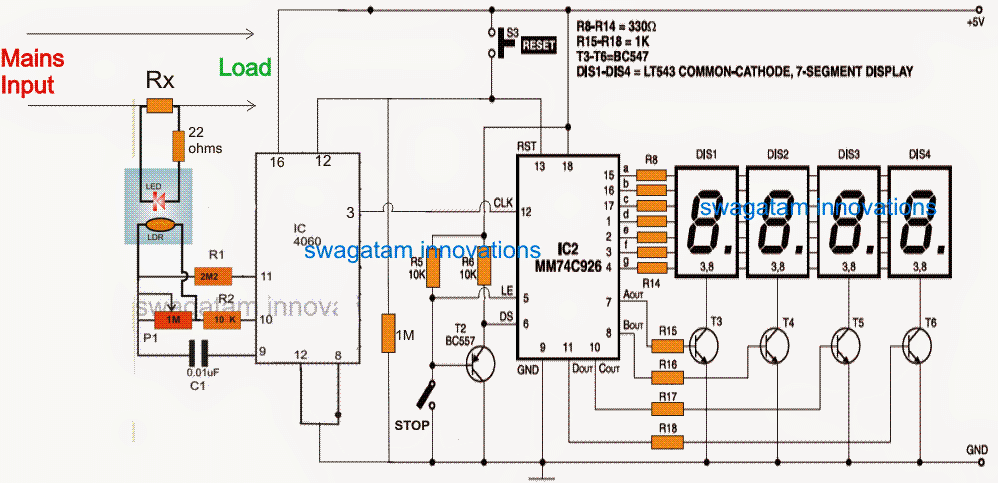
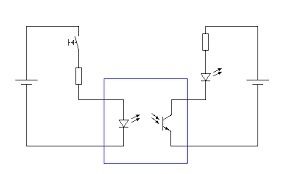
Ultraheli tööpõhimõte
Ultraheliandur võimaldab robotil objekti praktiliselt näha ja ära tunda, takistusi vältida, kaugust mõõta. Ultrahelianduri tööulatus on 10–30 cm.
Ultrahelianduri töö:
Kui ultraheliandurile rakendatakse kõrgepinge elektriline impulss, vibreerib see teatud kindlal sagedusspektril ja tekitab helilaineid. Alati, kui mõni takistus ultraheliandurist ette jõuab, peegelduvad helilained kaja kujul ja tekitavad elektrilise impulsi. See arvutab aja, mis kulub helilainete saatmise ja kaja vastuvõtmise vahel. Tuvastatud signaali seisundi määramiseks võrreldakse kaja mustreid helilainete mustritega.
Märge: Ultraheli vastuvõtja tuvastab ultrahelisaatja signaali ajal, kui saatelained tabavad objekti. Nende kahe anduri kombinatsioon võimaldab robotil tuvastada tema teel asuva objekti. Ultraheliandur on kinnitatud roboti ette ja see andur aitab robotil liikuda ka mis tahes hoone saalis.
Ultrahelianduri rakendused:
- Liiklussignaalide automaatne ümberlülitamine
- Sissetungija signalisatsioon
- Loendusinstrumentide juurdepääs lülitab parkimiskella
- Autode tagumine sonar
Ultrahelianduri omadused:
- Kompaktne ja kerge
- Suur tundlikkus ja kõrge rõhk
- Kõrge töökindlus
- Energiatarve 20mA
- Pulss sisse / välja suhtlus
- Kitsas vastuvõtunurk
- Annab täpsed kontaktivabad hinnangud 2 cm kuni 3 m ulatuses
- Plahvatuskoha valgusdiood näitab hinnanguid edasiliikumise kohta
- 3-kontaktiline päis muudab ühendamise servo arendamise lingi abil lihtsaks
Takistuste vältimise robotsõiduki rakendused:
- Eriti sõjalised rakendused
- Seda saab kasutada linnasõdade jaoks
Nüüd sai selgelt ettekujutuse robotsõiduki kontseptsioonist, kasutades takistuste tuvastamise ultraheliandurit, kui selle teema või elektri- ja elektroonikaprojektide kontseptsiooni kohta lisaküsimused jätavad allpool toodud kommentaarid.
Foto krediit:
- Ultrahelianduri üldine skeem Letsmakerobotid
- Ultrahelianduri tööpõhimõte Mikrosooniline








{kind=link}