

War Field Spying robot öise nägemiskaameraga
Nuhitav robot, nagu nimigi ütleb, on see, mida kasutatakse vaenlase territooriumide luuramiseks. Selle rakendused võivad olla:
- Sõja ajal, kus seda saab kasutada vaenlase maastikul teabe kogumiseks ja selle jälgimiseks kaugel turvalises piirkonnas, ning koostada ohutult vasturünnaku plaan.
- Terroriorganisatsioonide asukohtade jälgimine ja seejärel rünnaku kavandamine sobival ajal.
- Järelevalve kõigi katastroofidest mõjutatud piirkondade suhtes, kuhu inimesed ei pääse.
Lühike idee sõjavälja spioonirobotist
Nii et olgem lühidalt, kuidas saaksime robotit sõjaväljadel nuhkimiseks kasutada. Vaja on ainult roboti vooluringile paigaldatud traadita kaamerat, mis jäädvustab vaenlase territooriumide pilte ja videoid ning edastab need pildid, mille TV vastuvõtja võtab vastu.
Saame kujundada lihtsa sõja prototüübi välja luurav robot mida saab kaugjuhtida ja kaamera edastatud pilte saab teleris jälgida ja analüüsida.
Sõjavälja luuramise roboti riistvaraline rakendamine
Sõjavälja luureroboti kujundamiseks on meil vaja ainult järgmisi komponente, välja arvatud rataste ja mootoritega alus.
- Anduriseade - juhtmeta öönägemiskaamera: Peale selle, millest koosneb põhikaamera, koosneb see ka saatjaseadmest. See teeb pilte ja edastab need pildid läbi saatja digitaalsignaalidena, mille võtab vastu teleri või arvutiga ühendatud vastuvõtja. Kaamera võib vastuvõtjast olla kuni 30 miili kaugusel. A öise nägemise kaamera saab valgustust kas võimendades nähtavat valgust pildi võimenditega või kasutades infrapunavalgust otse objektide poolt - termopildistamine või objektide poolt peegelduv infrapunavalgus infrapunavalguse lähedal.
- Vastuvõtja üksus: Robot koosneb ka vastuvõtjaseadmest, mis võtab vastu mootorite ja seega ka robotiüksuse juhtimiseks käsklussignaalid.
- Täiturid: See koosneb kahest alalisvoolumootorist kui täiturmootorist, mis tagavad robotile tagurpidi ja edasi liikumise.
- Juhtplokk: See koosneb kaugjuhtimispuldist, mis koosneb mikrokontrollerist, kooderist ja RF-moodulist ning RF-vastuvõtja moodulist, mikrokontrollerist ja dekooderist koosnevale vooluringile manustatud vastuvõtjaseadmest.
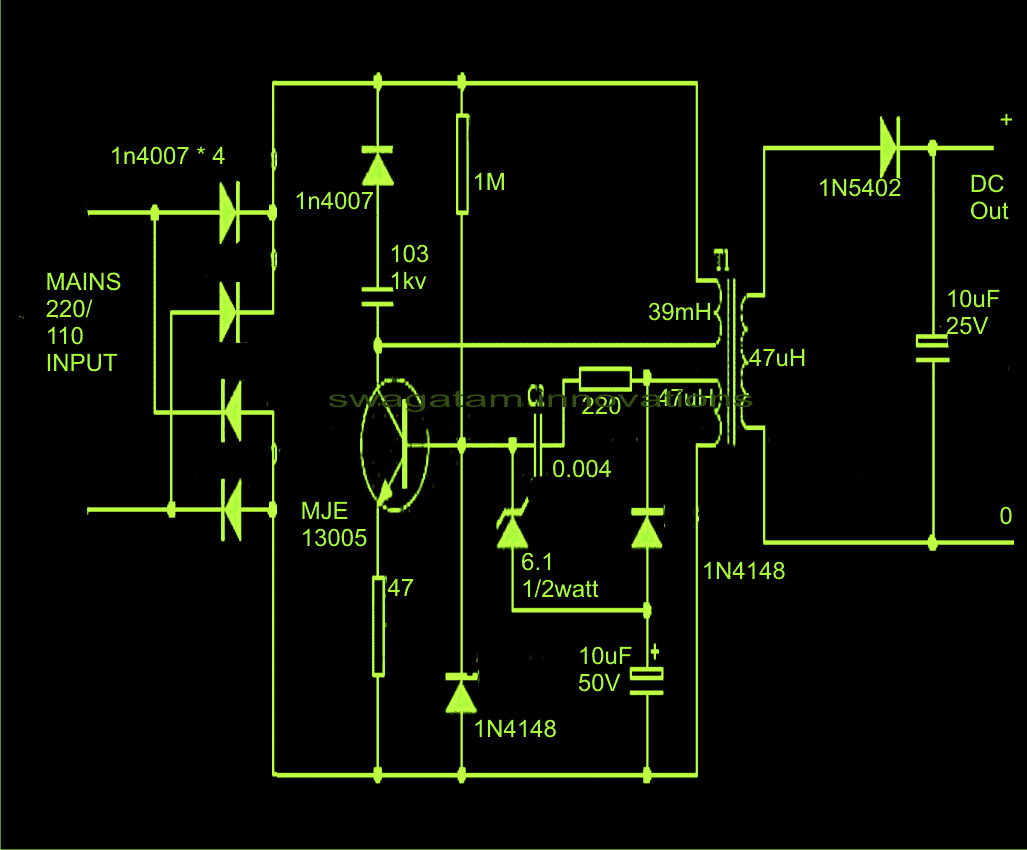
Kuidas töötab sõjavälja luurerobotite öönägemise kaamera?
Robotile manustatud traadita öönägemise kaamera koosneb traadita saatjast. Paigaldatakse IR-LED-ide kobar, mida kasutatakse pildiallikatele IR-valguse andmiseks. Infrapunavalguse eelistamise põhjuseks on see, et öösel on tavaliselt pime ja kuna iga kaamera vajab valgustamiseks valgust, on eelistatum infrapunavalgus, kuna kõik objektid kiirgavad infrapunavalgust. Kaamera on varustatud 12 V patareiga ja jäädvustab need pildid ning edastab need televisiooniseadmega ühendatud vastuvõtjasse. Saatjaüksus muundab pildid digitaalsignaalideks ja vastuvõtuseade võtab need digitaalsignaalid vastu ja teisendab need piltideks ning neid pilte või videoid jälgitakse ja analüüsitakse seejärel teleris.

Plokkdiagramm, mis näitab roboti põhitööd öise nägemiskaameraga
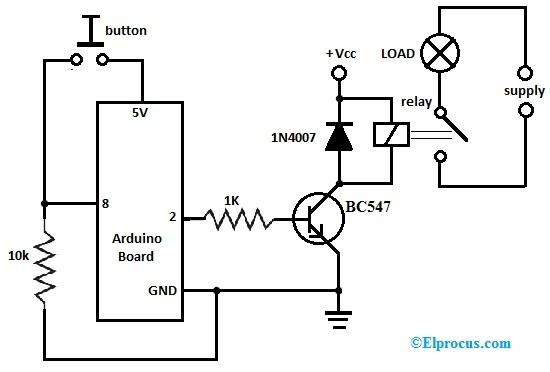
Sõjavälja luureroboti juhtimine
Kogu roboti juhtimine toimub kaugjuhtimise teel. See koosneb saatjaosast, mis edastab vajaliku teabe vastuvõtjasektsioonile. Robot on lihtsalt kaetud, vajutades saatja küljel paar nuppu.

Plokkskeem, mis näitab sõjavälja luurerobotit
Saatjaüksus koosneb kooderist, mis võtab mikrokontrollerilt paralleelsete andmesisestuste läbi nuppude ja edastab need paralleelsed andmed jadavormingus läbi RF-mooduli. Vastava nupu vajutamisel programmeeritakse mikrokontroller saatma kodeerijale paralleelselt asjakohaseid signaale. Kooder teisendab need paralleelsed signaalid jadavormiks, mida RF moodul edastab. Neid jadaandmeid moduleeritakse kandjasignaaliga, kasutades RF-saatjat, ja need on saatjad. Näiteks kui vajutame vasakut nuppu, saadab mikrokontroller käsu vastuvõtjaüksusele kodeerija ja RF-mooduli kaudu.

Plokkdiagramm, mis näitab sõjavälja luureroboti vastuvõtjat
Vastuvõtjaüksus koosneb RF-vastuvõtja moodulist, mis demoduleerib vastuvõetud signaali, ja dekooderist, mis võtab vastu seeriandmeid RF-vastuvõtja mooduli kaudu ja teisendab need paralleelseks. Mikrokontroller kasutab neid andmeid, et anda mootori juhi IC-le asjakohane juhtsignaal kahe mootori töö juhtimiseks. Seega saab robotit mootorit juhtides edasi või tagasi liikuda, samal ajal kui kaamera teeb oma tööd samaaegselt.
Robotid sõjaväes
Nüüd, kui meil oli lühike idee sõjavälja robotite kohta, meenutagem lühidalt praktilisi roboteid kaitses.
Sõjalistes operatsioonides kasutatavate robotite üks põhijooni on see, et need ei ole täiesti automaatsed. Inimesed kontrollivad neid tegelikult eemalt. Robotid või mehitamata masinad, nagu neid nimetatakse, võivad olla mis tahes liikuvad objektid või lendav lennuk, mis on varustatud kõigi vajalike seadmetega, nagu andurid, LIDARS (laseripõhised kommunikatsiooniradarid), kaamerad jne. Nende tegevus võib ulatuda pommide kõrvaldamisest vaenlase uurimiseni territooriumidel.
Sõjalistes operatsioonides kasutatakse 3 tüüpi mehitamata masinaid:
- Mehitamata maismaasõiduk (UGV): neid kasutatakse maapealsetel eesmärkidel. Nad suudavad kanda rasket koormat, liikuda ebaühtlasel maastikul ning lasta neile paigaldada mitmesuguseid andureid ja kaameraid.

Gladiaatori taktikaline UGV
- Mehitamata õhusõiduk (UAV): neid kasutatakse õhurelvade kandmiseks ja need on põhimõtteliselt lendavad masinad.

MQ-9 Reaper mehitamata õhusõiduk
- Mehitamata veealused sõidukid (UUV): põhimõtteliselt on need allveelaevad või masinad, mis saavad veealust vaatlust teostada.

Talisman UUV
Nüüd, kui oleme saanud teadmised sõjavälja robotist, asume teadmise ülesandele robotite kasutamise kohta meie riigi sõjalistes operatsioonides ja kuidas meie kaitseorganisatsioon selles valdkonnas edeneb?
Foto autorid:
- Gladiaatori taktikaline UGV wikimedia
- MQ-9 Reaper mehitamata õhusõiduk wikimedia
- Talisman UUV poolt inseneride garaaž








{kind=link}
{kind=link}