Robot on mehaaniline või virtuaalne tehisagent, tavaliselt elektromehaaniline masin, mida juhib arvutiprogramm elektroonilised vooluringid . Robotid võivad olla autonoomsed või poolautonoomsed ja ulatuda sellistest humanoididest nagu näiteks Honda's on arenenud samm uuenduslikus liikuvuses ja TOSY's. TOSY Ping Pong Playing Robot tööstuslikele robotitele, patendiabirobotitele, meditsiinilistele robotitele, koerteraapia robotitele, kollektiivselt programmeeritud sülemirobotitele ja isegi mikroskoopilistele nanorobotitele. Kujutades elu nagu välimus või automatiseerides liikumisi, võib robot edastada intelligentsuse tunnet või iseseisvalt. Selles artiklis käsitletakse IR-anduritel põhinevaid juhtmeta robotsõidukeid.
Mis on juhtmevaba robotsõiduk?
The robot on tehnoloogia mis tegeleb robotite, samuti arvutisüsteemide, projekteerimise, ehitamise, käitamise ja rakendamisega, kasutatakse juhtimiseks, sensoorne tagasiside ja infotöötlust nimetatakse robotiteks. See tehnoloogia tegeleb automatiseeritud masinatega, mida inimesed võivad paigutada ohtlikesse keskkondadesse või sarnaneda välimuse, käitumise poolest inimestega. Tänapäeval on robotid inspireeritud loodusest, mis panustavad bio-inspireeritud robootika valdkonda. Need robotid lõid ka uue robootika ja pehme robootika haru. Tööstuse ajastul välja töötatud mehaanilised tehnikad on praktilisemad rakendused nagu automatiseeritud masinad, kaugjuhtimispult ja traadita kaugjuhtimispult.

Juhtmevaba robotsõiduk
Mis on IR-andur?
An IR-andur on seade, mis kiirgab ümbritseva keskkonna mõningate aspektide tajumiseks, mis tuvastab sellele langeva IR-kiirguse. Emitter on lihtsalt IR-LED ( Valgusdiood ) ja detektor on lihtsalt IR-fotodiood, mis on tundlik sama lainepikkusega IR-valguse suhtes, mida kiirgab IR-LED. Kui IR-valgus langeb fotodioodile, muutuvad takistused ja väljundpinged proportsionaalselt vastuvõetud IR-valguse suurusega. Infrapunaandureid on ehitatud ja neid saab rakendada sõltuvalt rakendusest. Kontrastsusandurid (kasutatakse Robotite rida ), Lähedusandurid (kasutatakse puutetundliku ekraaniga telefonides) ja takistuste andurid (kasutatakse kaupade loendamiseks ja sissemurdmishäiretes) on mõned näited.

IR-andur
Raadiosageduslik kaugjuhtimisega juhtmeta robot
Raadiosagedusega juhitav juhtmevaba robotsõiduk sisaldab peamiselt RF-saatjat ja RF-vastuvõtjat.
RF-saatja
RF moodulid on tavaliselt väga väikese suurusega ja töötavad pingevahemikus 3V kuni 12V. RF-saatja moodulid on mõeldud töötama ainult 433MHz sagedusega. Kui edastate loogika nulli, siis saatja ei võta energiat. Edastamiseks on loogika üks, see tarbib 3 V-ga voolu umbes 4,5 mA. Saatja ja vastuvõtja on ühendatud 8051 mikrokontrollerit ja tehke soovitud toiming. RF-saatja on tarninud pinget vahemikus 3V kuni 6V ja väljundvõimsust vahemikus 4V kuni 12V.

RF-saatja
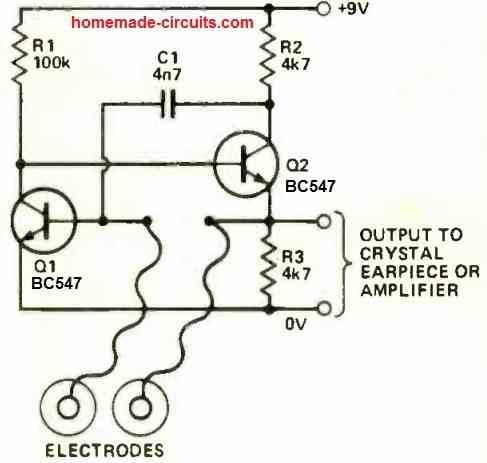
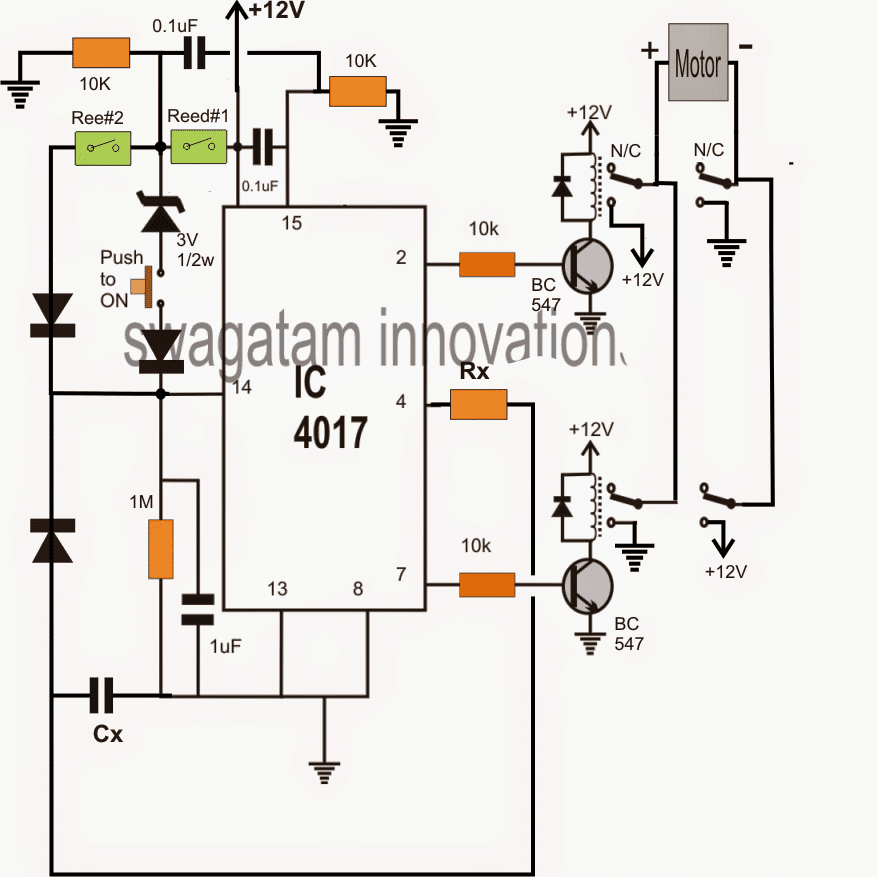
Allpool on kujutatud raadiosageduse saatja lülitusskeemi, mida kasutatakse erinevate surunuppude ühendamiseks, et robotiga sõiduk liiguks erinevates suundades, näiteks edasi, tagasi, paremale ja vasakule. Seega saame vastavat surunuppu vajutades juhtida robotiga sõiduki liikumist.
RF vastuvõtja
RF-vastuvõtja on samuti väike ja RF-vastuvõtja toitevool on 3,5 mA, tööpinge on 5 V. Raadiosaatja moodulid on mõeldud töötama ainult 433 MHz juures (mis peaks edastuse signaalide vastuvõtmiseks suhtluseks sobima saatja sagedusega).

RF vastuvõtja
Raadiosideühendus robotsõiduki abil
Raadiosagedus (RF) koosneb saatjast ja vastuvõtjast, mis on ühendatud juhitava isoleeritud vooluringiga. Juhtimissignaal edastatakse saatja otsast raadiolainete või elektromagnetlainete kujul, nii et seadme kaugjuhtimiseks, mis on ühendatud vastuvõtja otsaga. Seda juhtsignaali edastatakse elektromagnetlainete või raadiosageduslike raadiolainete abil. Seega saab vastuvõtja poolt vastu võetud juhtsignaal täpse väljundi, näiteks robotisõiduki, eriotstarbelise roboti, sideotstarbelise seadme jne.
Raadiosagedusega juhitav robotsõiduk
Selle projekti põhieesmärk on disainida robotsõiduk, mida juhib teleripult. Siin kasutab pakutud süsteem RF-tehnoloogia kaugjuhtimiseks. Infrapunasignaalide tuvastamiseks, mida kaugjuhtimispult edastab, on roboti juhtplokiga ühendatud IR-andur. Eelistatud toiminguks kasutatakse mikrokontrolleri seeriat 8051.
Edastavas (TX) sektsioonis kasutatakse nuppe käskude saatmiseks vastuvõtja otsa, et juhtida roboti liikumist, kas liikumiseks neljas suunas, näiteks edasi, paremale, tahapoole ja vasakule jne. Vastuvõtvas sektsioonis liidestuvad kaks mootorit perekonna 8051 mikrokontrolleriga, kus neid kasutatakse sõiduki liikumiseks.

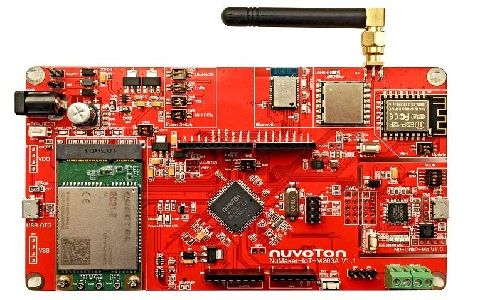
IR-anduritel põhinev juhtmevaba robotsõiduki projektikomplekt
Teleri kaugjuhtimispult genereerib RC5-põhised andmed, mida võtab vastu mikrokontrolleriga liidestatud infrapunavastuvõtja. Mikrokontrolleri sisseehitatud programm viitab koodile, mis loob i / p andmetel põhineva eelistatud väljundi mootorite käitamiseks mootori draiveri IC kaudu.
Raadiosaatja töötab RF-kaugjuhtimispuldina, mille eeliseks on sobiva antenniga ulatuslik tööulatus (kuni 200 meetrit), vastuvõtja dekodeerib enne teise mikrokontrolleri tarnimist ajada alalisvoolumootoreid nõutava töö jaoks mootori juhi IC kaudu.
Lisaks saab seda projekti täiustada kasutades DTMF-tehnoloogia . RF-tehnoloogia abil saame robotit juhtida mobiiltelefoni abil. Sellel tehnoloogial on pika suhtlusulatuse ees eelis võrreldes RF-tehnoloogiaga.
Seega on see kõik seotud infrapunaanduritel põhinevate juhtmeta robotitega. Loodame, et olete sellest kontseptsioonist paremini aru saanud. Lisaks sellele on selle kontseptsiooni osas kahtlusi või elektri- ja elektroonikaprojektid , andke oma tagasiside allpool olevas kommentaaride jaotises. Siin on teile küsimus, mis on IR-anduri peamine funktsioon?