Alalisvoolumootori ühendamine mikrokontrolleriga on paljudes tööstuslikes ja robotirakendustes väga oluline mõiste. Alalisvoolumootori ühendamisel mikrokontrolleriga saame juhtida mootori suunda, juhtida mootori kiirust. See artikkel kirjeldab teid Alalisvoolumootori kiiruse reguleerimine mikrokontrolleri abil 8051 Bluetoothi Android-kontrolleri abil. Plokkskeem on toodud allpool.

Alalisvoolumootori kiiruse juhtimise plokkskeem Androidi rakenduse abil
Alalisvoolumootori kiiruse juhtimine Androidi rakenduse abil
Alalisvoolumootori kiiruse juhtimine Android-mobiili abil on palju rakendusi, nagu tööstuslikud rakendused, eskalaatorid, liftid, robotirakendused ja turvasüsteemide rakendused. Kasutaja peab oma Android-nutitelefoni installima android-rakenduse.
Kasutaja saab DC-mootori kiiruse reguleerimiseks suuniseid saata. Juhtmeta Bluetooth-ühendust kasutatakse käskude saatmiseks kasutajale ja kontrollerile. Vooluahela peamised riistvarakomponendid on 8051 mikrokontroller, mootorijuht L293D IC, alalisvoolumootor, Bluetooth-moodul ja Android-nutitelefon.
Lisateabe saamiseks vaadake seda linki 8051 mikrokontrolleri ajalugu ja põhitõed
Mikrokontrolleri tihvti maksimaalne väljundvool on 15 V 5 V juures, kuid see ei muuda alalisvoolumootorit ja isegi mootori tekitatud tagumine EMF (elektrimootori jõud) võib mikrokontrollerit kahjustada.
Seetõttu ei ole väärt alalisvoolumootori ühendamist otse mikrokontrolleriga. Nii et mootori juhi vooluahel (L293D IC) on harjunud liides alalisvoolumootor ja mikrokontroller .
Mootori juht (L293D)
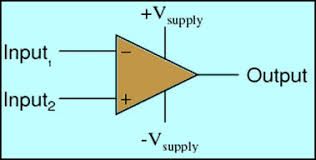
L293D on kahekordse H-silla mootori draiveri integraallülitus (IC). Mootori draiverid toimivad vooluvõimenditena, kuna nad võtavad nõrga voolu signaali ja annavad suurema voolu signaali. Seda suurema voolu signaali kasutatakse mootorite juhtimiseks. L293D sisaldab kahte sisseehitatud H-silla juhtimisahelat . Ühises töörežiimis saab korraga töötada kaks alalisvoolumootorit nii edasi- kui ka tagasisuunas. Kahe mootori mootoritoiminguid saab juhtida sisendloogika abil tihvtides 2 ja 7 ning 10 ja 15.
Sisendloogika 00 või 11 peatab vastava mootori. Logic 01 ja 10 pööravad seda vastavalt päripäeva ja vastupäeva. Mootorite töö alustamiseks peavad lubama tihvtid 1 ja 9 (vastavad kahele mootorile). Kui lubamise sisend on kõrge, lubatakse seotud draiver.
Selle tulemusena muutuvad väljundid aktiivseks ja töötavad koos sisenditega etapis. Samamoodi, kui lubamise sisend on madal, on see draiver keelatud ning nende väljundid on välja lülitatud ja suure impedantsiga olekus. L293D IC tihvtdiagramm ja sisemine struktuur on näidatud allpool.

L293D IC tihvtide skeem ja sisemine struktuur
Mis on Android?
The Androidi operatsioonisüsteem töötab Linuxil põhinevalt, on see mõeldud peamiselt puutetundliku ekraaniga mobiilseadmetele, näiteks nutitelefonidele ja tahvelarvutitele. Üks tänapäeval enimkasutatavatest mobiilsetest operatsioonisüsteemidest on Android. Android on tarkvara, mis asutati 2003. aastal Californias Palo Altos.

Android Mobile
Android on võimas operatsioonisüsteem ja see toetab nutitelefonides suurt hulka rakendusi. Need rakendused on kasutajatele mugavamad ja arenenumad. Android-tarkvara toetav riistvara põhineb ARM-i arhitektuuriplatvorm .
Android on avatud lähtekoodiga operatsioonisüsteem, mis tähendab, et see on tasuta ja seda saab kasutada igaüks. Androidil on saadaval miljoneid rakendusi, mis aitavad teil oma elu ühel või teisel viisil juhtida ja see on turul saadaval madala hinnaga ning seetõttu on Android väga populaarne.
Alalisvoolumootori kiiruse reguleerimise skemaatiline diagramm
Alalisvoolumootori kiiruse juhtimisahela skeem ja töö selgitus on toodud allpool.

Skemaatiline diagramm
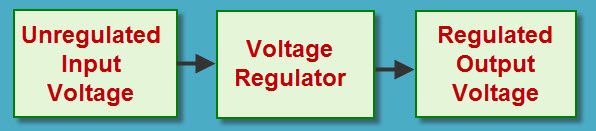
Vooluring kasutab standardset toiteallikat, mis koosneb 230 V kuni 12 V alalisvoolutrafost ja 4 dioodist, mis moodustavad silla alaldi, mis annab pulseerivat alalisvoolu, mis seejärel filtreeritakse elektrolüütkondensaator umbes 470 uF kuni 1000 uF.
Filtreeritud alalisvoolu reguleerimata kujul kasutatakse IC LM7805, et saada 5 V alalisvoolu konstant selle tihvti nr 3. Reguleeritud 5 V alalisvoolu filtreeritakse täiendavalt väikese elektrolüütilise kondensaatoriga 10 uF vooluahela nii tekitatud müra jaoks.
Android-seadme juhtsignaal saadetakse Bluetoothi kaudu. See signaal edastatakse mikrokontrolleriga mõlema seadme saatja ja vastuvõtja abil. Seda signaali tähistab üks täht, mis reguleerib mootori kiirust ja suunda.
Kuidas kontrollida alalisvoolumootori kiirust? Selles projektis on peamine tööpõhimõte see, et PWM-impulsid genereeritakse programmeeritud mikrokontrollerist, et võimaldada L293D tihvti 1 impulsside töötsükli suurendamiseks ja vähendamiseks. Need tööimpulsid võivad viia alalisvoolumootori liikumiseni kindla kiirusega õiges suunas.
Impulsi laiuse modulatsioon
Impulsi laiuse modulatsioon saavutatakse mikrokontrolleri väljundist, mis on nõuetekohaselt programmeeritud võtma selleks liidetud Bluetooth-seadme poolt vastuvõetud andmeid. Üks Bluetooth-moodul on korralikult liidetud mikrokontrolleriga kahesuunalise andmevoo jaoks, samal ajal kui programm käivitatakse PWM-impulsside arendamiseks.
Igast nutitelefonist pärit androidirakendus suhtleb telefoni sisseehitatud Bluetoothi kaudu Bluetooth-mooduliga, mis on vajaduse korral ühendatud mikrokontrolleriga. Impulsi laiuse modulatsiooni töötsükkel on näidatud allpool.

PWM-i töötsükkel
Android-programmi töötava nutitelefoni ülemist puutenuppu kasutatakse PWM-i õigeaegse töötsükli suurendamiseks, allanuppu aga töötsükli vähendamiseks.

Android-rakendus alalisvoolumootori kiiruse juhtimiseks
The Alalisvoolumootor jookseb läbi mootori draiveri L293D IC koos erineva töötsükliga, mis võimaldab kiiruse reguleerimiseks mikrokontrollerist toita L293D tihvti 1. Mikrokontrolleriga ühendatud vedelkristallekraani andmepistikud näitavad mootori töötamise kiiruse protsenti.
Seega on alalisvoolumootori kiiruse juhtimine androidrakenduse abil kulutõhus, praktiline ja ohutum viis energiat säästa. Mootori kiiruse reguleerimiseks saab kasutada lihtsat PWM (pulsilaiuse modulatsiooni) tehnikat. Laine töötsükkel kontrollib selle kiirust. Väljundporte vahetades muudab see tõhusalt mootori suunda.
Lisaks esitage selle artikliga seotud küsimuste kohta oma väärtuslikud ettepanekud, kommenteerides allolevas kommentaaride jaotises. Siin on teile küsimus, millised on alalisvoolumootori liidese rakendused mikrokontrolleris?