Postitus selgitab meetodit, mida saab tõenäoliselt kasutada passiivse infrapunaanduri võime suurendamiseks, et tuvastada isegi inimese staatilist või kirjatarbimist. Tavaliselt pole see funktsioon tavaliste PIR-andurite puhul võimalik.
Kuidas PIR inimese kohalolu tuvastab
Olen sellel veebisaidil juba arutanud paljusid PIR-põhiseid liikumisdetektorirakendusi, kuid kõik need rakendused nõuavad inimese kohalolekut pidevalt liikumises, et hoida PIR-i nende kohaloleku tuvastamisel. See näib olevat suur puudus, mis takistab neid üksusi tuvastamast pidev või statsionaarne inimeste hõivamine.
Eespool selgitatud puudusel on aga põhjus. Tavalised PIR-andurid töötavad inimkeha IR-signaalide tuvastamisel läbi nende esiläätsel asuva paari paralleelse pesa ja selle sisemine vooluring lülitub sisse alles siis, kui IR-signaalid ületavad nende sensoorsete pilude ('visioonid').
IR-signaalide ristumine üle sensoorsete pesade võimaldab PIR-ahelal teabe teisendada kaheks vastavaks vahelduvaks impulsiks, mis omakorda parandatakse, et tekitada PIR-i väljundpoldil käivitav pinge.
PIR ei suuda tuvastada kirjatarvete sihtmärki
See tähendab, et kui infrapunaallikas on liikumatu, ei palu see PIR-moodulil väljundnõelale käivitada. See tähendab ka seda, et allikast pärinev IR-signaal peaks kuidagi jätkama ristumist antud PIR-tuvastuspiludes, et võimaldada tal tunnetada antud inimest tsoonis.
Tundub, et selle jaoks pole otsest ega lihtsat lahendust, sest PIR-mooduleid ei saa selleks sisemiselt muuta, mis halvendab seadet inimese statsionaarse kohaloleku tuvastamisest.
Kuid loogiline järgimine ütleb meile, et kui selle varieeruv infrapunaallikas võib olla vajalik PIR-mooduli aktiveerimiseks, siis miks mitte sundida PIR-i ise subjekti asemel pidevas liikumises olema.
Kontseptsiooni saab visualiseerida järgmise GIF-i simulatsiooni abil, mis näitab võnkuvat PIR-moodulit ja staatilist inimest olekus tuvastustsoonis.

Siin näeme, kuidas võnkuv PIR kohaneb probleemiga ja muudab ennast, võimaldades tuvastada isegi staatilisi IR-objekte.
See muutub võimalikuks seetõttu, et PIR moodul muudab oma liikumise kaudu statsionaarse IR-allika pidevalt muutuvaks IR-kujutiseks oma kahe vastuvõtu pesa ulatuses.
Ehkki idee tundub keeruline, saab selle tegelikult lihtsalt lahendada, kasutades aeglaselt võnkuvat PwM-i juhitavat mootorahelat.
Õpime järgmistes osades kogu mehhanismi ja vooluahela üksikasju.
Nagu me juba arutlesime, suudavad tavapärased PIR-moodulid tuvastada ainult liikuvaid elusobjekte ega suuda tuvastada statsionaarset sihtmärki, mis muudab selle rakendamise piiratud ainult inimese liikumisdetektorina.
Rakenduste jaoks, kus motoorsete olude tuvastamine on sellistes stsenaariumides vajalik, võib tavapärane PIR muutuda kasutuks ja selle enda täiendamiseks võib vaja minna mõnda välist korraldust.
PIR-i kujundamine liikumatute sihtmärkide tuvastamiseks
Ülaltoodud jaotises saime teada, et selle asemel, et sihtmärki oleks vaja liikuda, saab PIR-mooduli soovitud staatilise sihtmärgi tuvastamise jaoks ise üle viia antud raadiuses.
Järgmistes jaotistes õpime lihtsa vooluahela mehhanismi kohta, mida saab kavandatud võnkumiste korral kasutada väikese alalisvoolumootori kohale paigaldatud PIR-iga.
PWM / Flip Flop juhitav mootori draiver
Süsteem põhimõtteliselt nõuab PWM-i abil kontrollitav kiiruse määramine ja klappide vahetamine mootori jaoks. Järgmine diagramm näitab, kuidas neid funktsioone saab PIR-mootorile omistada lihtsa vooluahela abil:

Näidatud vooluahel kasutab ühte IC-d HEF40106 kuusnurga abil inverteerivat Schmitt-väravat IC, mis sisaldab 6 muundurit EI väravat.
Väravad N1 ja N2 on konfigureeritud tootma reguleeritavat PWM-väljundit, mis juhitakse puhvrit moodustavatesse väravatesse N4, N5, N6.
Nende puhverväravate ühine väljund lõpetatakse mootorijuhi mosfeti väravani.
PWM-i sisu määratakse P1 abil, mis lõpuks rakendatakse ühendatud mootorile DPDT relee kontaktide komplekti kaudu.
Need relee kontaktid määravad mootori liikumise suuna (päripäeva või vastupäeva).
Seda klapiga DPDT relee kontakte juhitakse värava N3 ümber konfigureeritud astma taimeriga, kusjuures kondensaator C3 / R3 määrab, millise kiirusega relee peab ümber lülituma, et mootor saaks oma pöörlemissuunda järjepidevalt muuta.
Ülaltoodud konstruktsioon võimaldab mootoril teostada nõutavat aeglast edasi-tagasi võnkumist antud radiaalses tsoonis.
C3 võib valida ülemineku alustamiseks iga 5–6 sekundi järel ja PWm-i võib reguleerida, et võimaldada mootori üli aeglast liikumist, sest see peab lihtsalt tagama, et PIR-i pilud ületavad sihtmärgi IR-signaale õigeaegselt.
Kuid kuna mootori töö on aeglane, tuleb PIR-i väljund säilitada viivitatud väljalülitustaimeriga, nii et ühendatud koormus ei lülituks välja ja sisse, samal ajal kui mootori liikumine lõikab vaheldumisi infrapunajuhtmeid inimese elukohast.
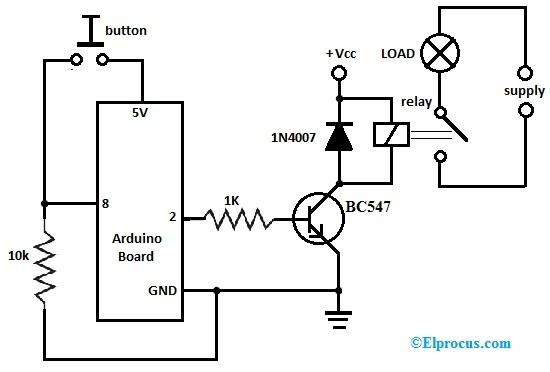
Viivituse taimer
Järgnev viivitustaimeri ahela etapp saab kasutada, mis tagab, et iga kord, kui PIR-väljund tekitab tajutava impulsi, pikendatakse taimeri viivitust 5–10 sekundi jooksul ja ühendatud koormust ei katkestata protsessi käigus.

Ülaltoodud seadistustes näeme mootorit, mis saab oma elektriajamiga toiteallika PWM / flip flop etapist, nagu arutati eelmises lõigus.
Mootori spindlit võib näha ühendatud horisontaalse võlliga, mille kohal PIR on kinnitatud, nii et mootori liikumisel läbib PIR vastavalt muutuva radiaalse edasi-tagasi liikumise.
Samal ajal kui indutseeritakse ülaltoodud PIR-liikumine, tuvastatakse tsoonis statsionaarselt sihtmärgil olevad IR-signaalid lühikeste vahelduvate impulsside kujul, mis tekivad sinise juhtmega tähistatud PIR-i väljundnõelas.
Neid impulsse rakendatakse üle 1000uF kondensaatori, mis laeb iga impulsiga ja tagab, et BC547 hoitakse protsessi ajal juhtimisrežiimis katkestusteta.
BC557 etapist koosnev relee draiver reageerib ülaltoodud stabiilsele signaalile BC547 kollektorist ja hoiab omakorda relee SISSE, kuni PIR tuvastab inimese kohaloleku.
Seega jääb releekoormus pidevalt aktiveerituks, kuna piirkonnas on liikumatu inimene.
Kuid kui inimese hõivatus eemaldatakse või kui sihtmärk eemaldub tsoonist, hoiab viivitaimeri relee ja koormust aktiveeritud ettenähtud 5–10 sekundi jooksul, misjärel see seiskub jäädavalt, kuni tsoon on uuesti hõivatud potentsiaalse infrapuna kiirgava allika poolt.
Osade nimekiri
- R1, R4 = 10K
- R2 = 47 OHMS
- P1 = 100K POT
- D1, D2 = 1N4148
- D3 = MUR1560
- C1, C2 = 0,1 uF / 100 V
- Z1 = 15 V, 1/2 vatti
- Q1 = IRF540
- Q2 = BC547
- N1 --- N6 = IC MM74C14
- DPDT = DPST LÜLITI VÕI DPDT RELE
- R3, C3 määratakse mõne katse-eksituse meetodil
UUENDAMINE:
Eespool selgitatud PIR-ahelat inimese staatilise kohaloleku tuvastamiseks saab palju lihtsustada, kasutades signaalilõikurahelat, nagu on kujutatud järgmises GIF-simulatsioonis:
Hoolikas kontroll näitab, et tegelikult pole võnkumisliikumine vajalik, mootoril ja hakkija teral võiks lasta vabalt pöörelda, hoides mootori kiirus madalamal tasemel .
See saavutaks ka kavandatud staatilise PIR-sensori toimingu.

Video demo, mis tõendab PIR-i inimese staatilist tuvastamist
Eelmine: 3 heli aktiveeritud lülitusahelat on selgitatud Järgmine: 4 lihtsat sireenilülitust, mida saate kodus ehitada