Elektromehaanilist seadet või masinat, mida kasutatakse erinevatel eesmärkidel ning mida programmeerimistehnika abil juhitakse ja kasutatakse, nimetatakse robotiks. Robotid on erinevat tüüpi, lähtudes nende rakendustest, näiteks tööstusrobotid , sõjaväe robotid, kosmoserobotid, kodumaised robotid, kõndimisrobotid, ronimisrobotid jne. Kõige arenenum robootikaprojektid töötatakse välja tõhusaks kasutamiseks erinevates valdkondades mitme rakenduse jaoks. Selles artiklis käsitleme robootikaprojektide eriliiki, nimelt kõndimis- ja ronimismehhanismiga robotsõiduki järgimist.
Robotisõiduk

Robootikaprojektid inseneriõpilastele
The robot-sõidukid on spetsiaalsed masinatüübid, mis on ette nähtud liikumiseks maapinnal, õhus, veealuses ja ruumis autonoomselt ilma pardal oleva inimeseta. Neid robotisõidukeid juhib ja juhib mitmesugused andurid põhinevad juhtimissüsteemid. Robotsõidukid on spetsiaalselt ette nähtud kasutamiseks tingimustes, kus inimene ei pääse sisse, näiteks tuleõnnetused, väga kõrged või väga madalad temperatuurid jne.
Liinijärgija robot

Liinijärgija robot
Kindlat rada või joont järgides liikuvat robotsõidukit võib nimetada a liinijärgija robot . Neid liinijärgimisroboteid kasutatakse spetsiaalselt tööstuslikes rakendustes eriotstarbel, näiteks mitmesuguste osade või masinate või sõidukite (autod, jalgrattad jne) transportimiseks, järgides konkreetset joont ühest punktist (generaatorplokk) teise punkti (montaažiüksus) .
Tavaline joon, mis järgneb roboti sõidukile, millel on erilised omadused, näiteks kõndimise ja ronimise mehhanism, on üks huvitavaid robootikaprojekte inseneriõpilastele , mida saab kasutada mitmel rakendusel. Allpool on toodud lihtsad sammud kõndimis- ja ronimismehhanismiga joonejälgimisroboti kujundamiseks.
1. samm: nõutavate komponentide kogumine

Elektrilised ja elektroonilised komponendid
Kõnni- ja ronimismehhanismiga robotveokile järgneva projekteerimisliini jaoks vajalikud komponendid tuleb hinnata roboti rakenduse põhjal. Koguge kõik elektrilised ja elektroonilised komponendid, nagu takistid, kondensaatorid, IR-saatjad, alalisvoolumootorid, transistorid, roboti kere ja fotodioodid koos vastava nimiväärtusega, koos muude osadega, nagu papp, poldid, mutrid, alumiiniumribad jne.
2. samm: joonejälgija roboti vooluahela analüüsimine

Robotisõidukile järgnev joon, mis on laiendatav kõndimis- ja ronimisrobotite plokkskeemini
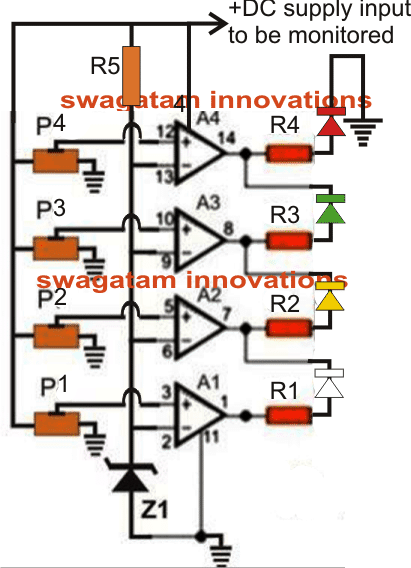
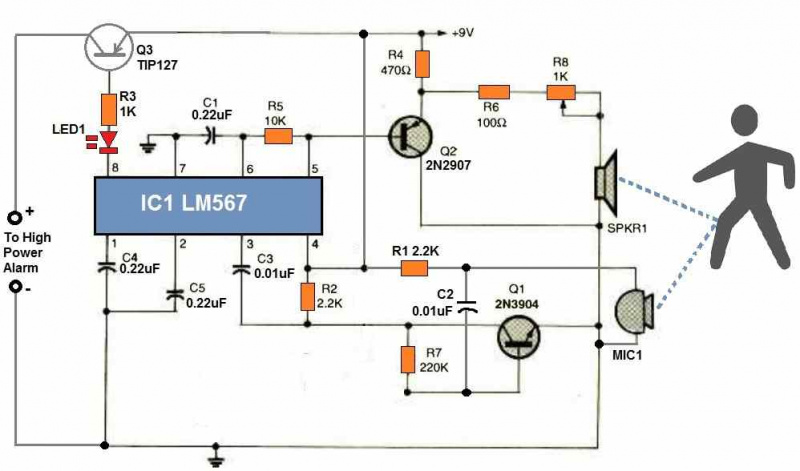
Kujundage peamiselt erinevate plokkidega projektiahelate plokkskeem, näiteks a toiteploki plokk , IR-LED ja fotodioodplokk jne. Pärast komponentide kogumist analüüsige vooluringi disaini, kasutades erinevaid kasutatud komponente. Seejärel asetage komponendid enne vooluahela kokkupanemist trükkplaadile voolujuhtme skeemi järgi jootmata leivaplaadi kohale, kasutades ühendusjuhtmeid. Katsetades vooluringi jootmata leibplaadil, kui vooluahelas või komponentide nimiväärtustes on vaja mingeid muudatusi, saab vaheldumisi teha lihtsalt, raiskamata raha ja aega komponentide asendamiseks või vooluahela kujunduse muutmiseks.
3. samm: komponentide kokkupanek ja jootmine

Robotisõidukile järgnev joon, mis on laiendatav kõndimis- ja ronimisrobotiprojektini
Seega, pärast vooluahela kujunduse analüüsimist, ühendage komponendid vastavalt PCB-le toodud skeemile. Seejärel jootke vooluring, kasutades jootmispüstoli ja jootetraati, järgides õigeid jootmisjuhiseid. Ühendage roboti kõik osad korralikult, et moodustada joonekuulurrobot, nagu on näidatud ülaltoodud pildil, ja vajadusel liimige robotisõiduki osad.
4. samm: liinijärgija robot
IR-saatjat ja fotodioodi kasutatakse a fotosensor paar, mida saab kasutada kindlaksmääratud raja tuvastamiseks liinijärgija roboti liikumisel seintel kõndimise ja ronimise ajal. Fotosensoripaar annab sobivad signaalid transistoride lülitamiseks liinijärgimisroboti mootorite juhtimiseks.
5. samm: liinijärgne robotkäik kõndimis- ja ronimismehhanismiga
Neid on arvukalt robootikaprojektid inseneriõpilastele mille liini jälgija kõndimis- ja ronimismehhanismiga robotsõiduk on uuenduslik ja huvitav projekt, mille saate ise kujundada, kasutades meie tasuta e-raamatut elektroonikaprojektide kujundamiseks.
The robootika rakendamine suureneb meie igapäevases elus kiiresti mitme funktsiooni jaoks, näiteks tööstuslikes rakendustes - raskete toodete teisaldamine või tõstmine, piiratud alal transportimine konkreetset rada pidi, töötlemine, keevitamine, kodutehnika, autonoomsed robotid, sõjaväe robotid inimeste vähendamiseks kaasatus ja oht, koostöörobotid inimestega suhtlemiseks, näiteks mitme ülesande täitmiseks, haridusrobotid, mobiilrobotid ja humanoidid.
Kas olete huvitatud kujundamisest elektroonika projektid omaette? Kas teate, kuidas arendada humanoidroboteid? Kui soovite inseneriõpilastele mõeldud robootikaprojektide kohta rohkem teada saada, võite tehnilise abi saamiseks postitada oma päringud, kommentaarid, ideed ja ettepanekud allpool olevasse kommentaaride jaotisse.