Üldiselt kasutame tööstusseadmete või kodumasinate, näiteks ventilaatori, jahuti, tööstusmootorite jms sisselülitamiseks tavapäraseid seinakontaktide jaotuskilpe. Kuid lülitite korrapärane kasutamine on väga keeruline. Seega koduautomaatika kõigi vajalike elektri- ja elektroonikakoormuste juhtimiseks on välja töötatud tööstusautomaatika süsteemid. Seda elektrisüsteemi automatiseerimist saab kavandada mitmesuguste abil andurite tüübid ja andurite ahelad. Niisiis, see artikkel annab põhjaliku ülevaate sensorist, erinevatest põhimõtetest ja skeemidest.
Mis on andur?
Andurina saab määratleda seadme, mis annab väljundi koguste või sündmuste muutuste tuvastamise teel. Üldiselt nimetatakse andureid seadmeteks, mis genereerivad elektrisignaali või optilist väljundsignaali, mis vastab sisendite taseme kõikumistele. Andureid on erinevat tüüpi, näiteks võib kaaluda termopaari, mida võib pidada temperatuurianduriks, mis toodab sisendtemperatuuri muutuste põhjal väljundpinget.
Võib jälgida mitut tüüpi andureid paljudes domeenides, mida kasutatakse mitmesuguste rakenduste jaoks. Vaatleme mõnda järgmistest andurite tüübid .

Andurite tüübid
Erinevat tüüpi andurid elektroonikas
Igapäevaelus oleme harjunud oma energiasüsteemides sageli rakendama erinevat tüüpi andureid, näiteks elektri- ja elektroonikaseadmed, koormuse juhtimissüsteemid, koduautomaatika või tööstusautomaatika jne.
Igat tüüpi andureid saab põhimõtteliselt liigitada analoogandurid ja digitaalsensorid . Kuid enamikus elektroonikaseadmetes kasutatakse sageli mõnda tüüpi andureid, nagu temperatuuriandurid, IR-andurid, ultraheliandurid, rõhuandurid, lähedusandurid ja puuteandurid.
- Temperatuuriandur
- IR-andur
- Ultraheliandur
- Puudutage sensorit
- Lähedusandurid
- Rõhuandur
- Nivooandurid
- Suitsu- ja gaasiandurid
Temperatuuriandur
Temperatuur on erinevatel põhjustel üks kõige sagedamini mõõdetud keskkonnakoguseid. Temperatuuri mõõtmiseks on erinevat tüüpi temperatuuriandureid, näiteks a termopaar , termistorid, pooljuhtide temperatuuriandurid, takistustemperatuuri detektorid (RTD) ja nii edasi. Nõude põhjal kasutatakse temperatuuri mõõtmiseks erinevat tüüpi andureid erinevates rakendustes.

Temperatuuriandur
Temperatuurianduri ahel
Lihtsa vooluahelaga temperatuuriandurit saab kasutada koormuse sisse- või väljalülitamiseks kindlal temperatuuril, mille tuvastab temperatuuriandur (siin kasutatakse termistorit). Vooluring koosneb akust, termistorist, transistoridest ja releest, mis on ühendatud vastavalt joonisele.

Temperatuurianduri ahel
Relee aktiveeritakse temperatuurianduri abil, tuvastades soovitud temperatuuri. Seega lülitab relee sellega ühendatud koormuse (koormus võib olla vahelduv- või alalisvool). Saame seda vooluringi kasutada ventilaatori automaatseks juhtimiseks temperatuuri alusel.
Temperatuurianduri praktiline kasutamine
Eelkõige kaaluge temperatuuriandurid mis on jällegi liigitatud erinevat tüüpi anduriteks nagu termistorid, digitaalsed temperatuuriandurid jne.
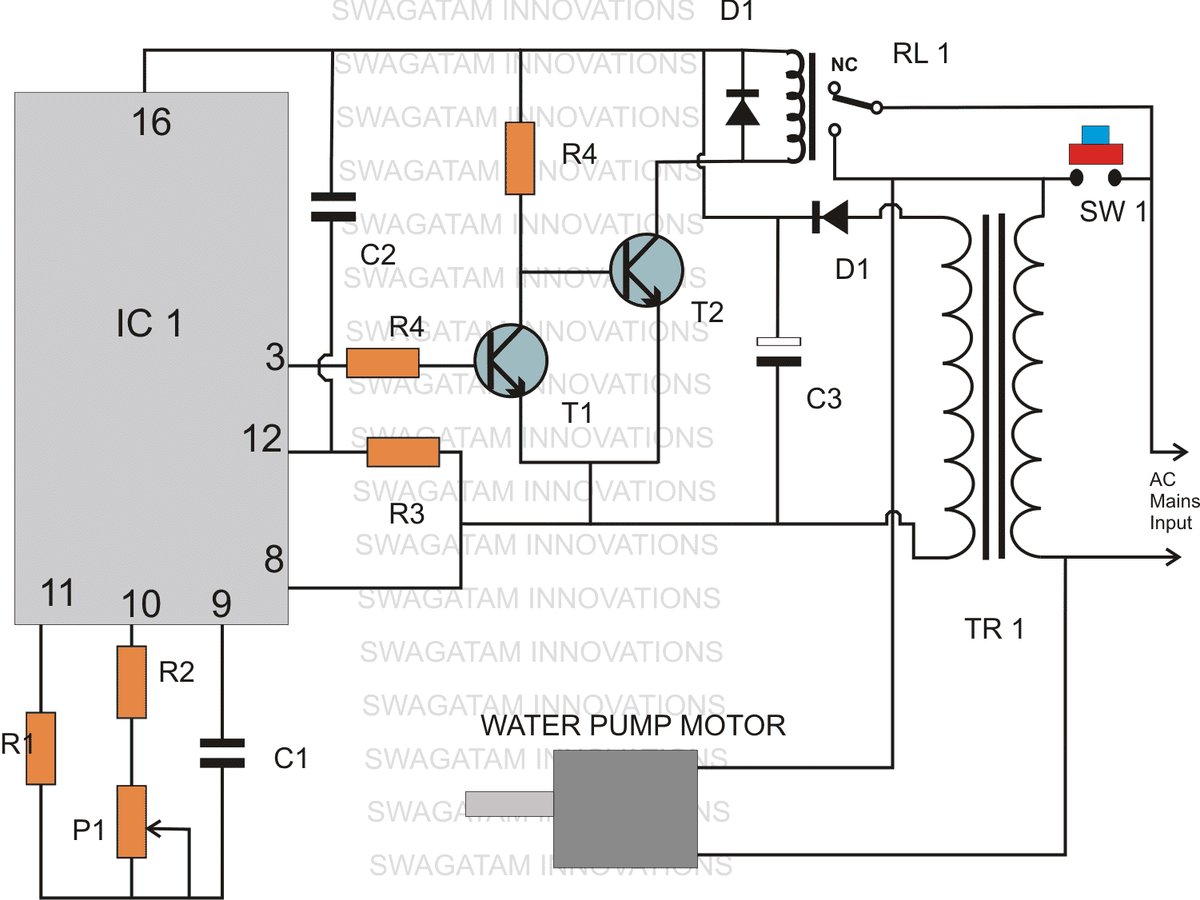
Programmeeritav digitaalne temperatuuri regulaator on praktiline sisseehitatud süsteemipõhine elektrooniline projekt, mis on loodud ja mida kasutatakse mis tahes seadme temperatuuri reguleerimiseks vastavalt tööstuslikele rakendustele. Digitaalse temperatuurianduri vooluahela komplekt on näidatud alloleval joonisel.
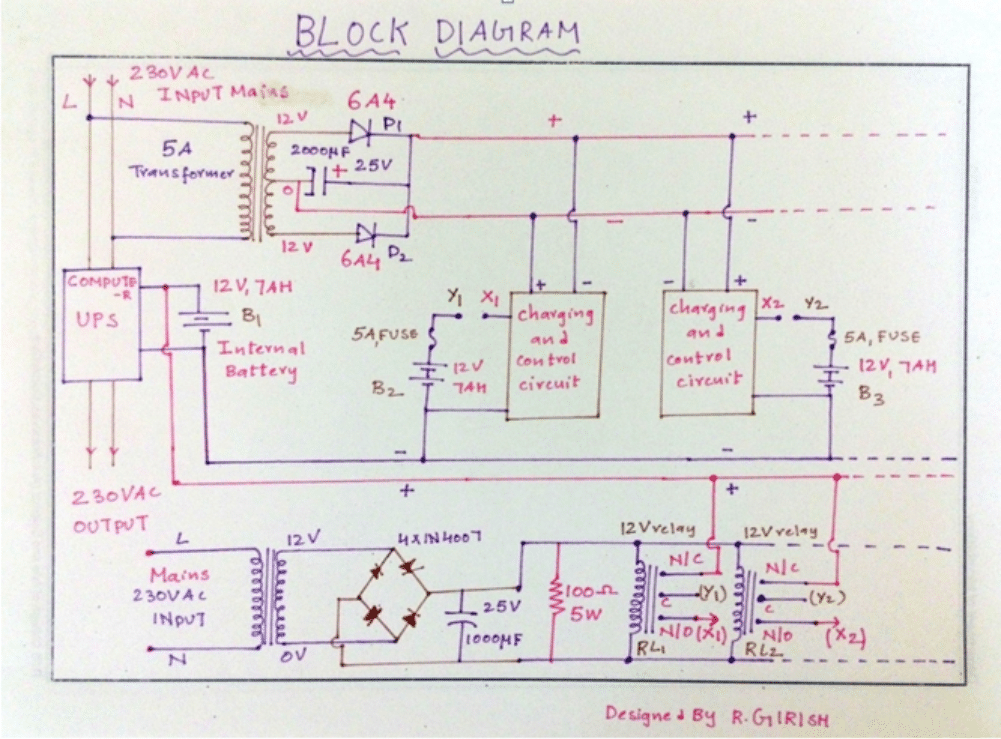
Projekti vooluringi plokkskeemi saab erinevate plokkidega kujutada järgmiselt, nagu on näidatud joonisel.
The toiteplokk koosneb 230 V vahelduvvoolu toiteallikast, pinget alandavast trafost, alaldist vahelduvvoolu alalisvoolu alalisvoolu alalisvoolust, alalisvoolu alalisvoolu alalispinge püsimiseks projekti vooluahela sisendiks.
LCD-ekraan on liidetud mikrokontrolleritega 8051, et kuvada temperatuuri näidud vahemikus -55 ° C kuni + 125 ° C. Digitaalset temperatuuriandurit IC DS1621 kasutatakse 9-bitiste temperatuurinäitude edastamiseks mikrokontrollerile.
EEPROM-i püsimälu kasutatakse kasutaja määratud (maksimaalse ja minimaalse) temperatuuri seadete salvestamiseks mikrokontrollerite lülitite komplekti kaudu. Mikrokontrolleriga on ühendatud relee, mida saab juhtida transistori draiveri abil. Koormust saab juhtida selle relee abil (siin on koormust näidisena näidatud laternana).
IR-andur
Infrapunavalguse kiirgamiseks ja tuvastamiseks kasutatavaid fotorakuga väikesi fotokiipe nimetatakse IR-anduriteks. IR-andureid kasutatakse tavaliselt kaugjuhtimispuldi tehnoloogia kujundamisel. IR-andur saab kasutada robotisõiduki takistuste tuvastamiseks ja seega robotisõiduki suuna juhtimiseks. Infrapunavalgustuse tuvastamiseks saab kasutada erinevaid andureid.

IR-andur
IR-anduri ahel
Lihtsat IR-anduri vooluahelat kasutatakse meie igapäevases elus teleri kaugjuhtimispuldina. See koosneb infrapunakiirguse emitteri ahelast ja infrapuna vastuvõtja ahelatest, mida saab kujundada joonisel näidatud viisil.

IR-anduri ahel
Infrapuna valguse kiirgamiseks kasutatakse infrapunakiirguse kiirgust, mida kontroller kasutab kaugjuhtimispuldina. See infrapunavalgus saadetakse või edastatakse infrapunavastuvõtja ahelasse, mis ühendub seadmega nagu teler või infrapuna kaugjuhitav robot. Saadud käskude põhjal juhitakse telerit või robotit.
IR-anduri praktiline rakendamine
Infrapunaandureid kasutatakse sageli teleripuldide kujundamiseks. See on lihtne infrapunaanduritel põhinev elektroonikaprojekt, mida kasutatakse robot-sõiduki kaugjuhtimiseks üldise teleripuldi või abil IR kaugjuhtimispult . Infrapunaanduriga juhitava robot-sõiduki projekti vooluring on näidatud joonisel.
IR-ga juhitavate robotsõidukite plokkskeem koosneb erinevatest plokkidest, nagu mootorid ja mootorisukelduja, mis on ühendatud mikrokontrolleritega 8051, toiteallikaks olev aku, IR-vastuvõtja plokk ja teleri kaugjuhtimispult või IR-pult, nagu joonisel näidatud.
Siin kasutatakse infrapunaanduritel põhinevat teleripulti, et kasutaja saaks robotile sõidukile käske saata. Infrapunavastuvõtja vastuvõetud käskude põhjal, mis on liideses mikrokontrolleriga vastuvõtja otsas. Mikrokontroller genereerib mootorite juhtimiseks asjakohaseid signaale, et juhtida robotiga sõiduki suunda edasi või tagasi või vasakule või paremale.
Ultraheliandur
Andurit, mis töötab põhimõttel, mis sarnaneb sonari või radariga ja hindab suulise tõlke abil sihtmärgi atribuute, nimetatakse ultrahelianduriteks või transiiveriteks. Andureid on erinevat tüüpi, mis liigitatakse aktiivseteks ja passiivseteks ultrahelianduriteks, mida saab andurite töö põhjal eristada.
Aktiivsete ultraheliandurite tekitatud kõrgsageduslikud helilained võetakse ultrahelisensori poolt kaja hindamiseks tagasi. Seega kasutatakse kaja edastamiseks ja vastuvõtmiseks kuluvat ajaintervalli objekti kauguse määramiseks. Kuid passiivseid ultraheliandureid kasutatakse lihtsalt konkreetsetes tingimustes esineva ultraheli müra tuvastamiseks.

Ultraheliandur vooluringiga
Ülaltoodud joonisel kujutatud ultraheli moodul koosneb ultraheli saatjast, vastuvõtjast ja juhtimisahelast. Praktiline rakendamine ultraheliandur koos vooluahelaga saab kasutada ultraheli kaugusanduri vooluringina, nagu allpool näidatud.
Alati, kui vooluahelale antakse toiteallikat, tekivad andurilt ultraheli lained, mis edastatakse andurile ja peegelduvad tagasi takistuselt või objektilt, mis on selle ees. Seejärel võtab vastuvõtja selle vastu ning objekti ja anduri vahelise kauguse arvutamiseks kasutatakse kogu saatmiseks ja vastuvõtmiseks kuluvat aega. Mikrokontrollerit kasutatakse kogu toimingu töötlemiseks ja juhtimiseks programmeerimistehnika abil. LCD-ekraan on kauguse kuvamiseks (tavaliselt cm-des) liidetud vooluringiga.
Ultrahelianduri praktiline kasutamine
Objekti kauguse mõõtmiseks saab kasutada vooluringidega ultraheliandureid. Seda meetodit kasutatakse juhul, kui me ei saa rakendada tavapäraseid meetodeid selliste ligipääsmatute alade mõõtmiseks nagu kõrge temperatuuri või rõhutsoonid jne. Ultrahelisensoripõhise kauguse mõõtmise projekti vooluahela komplekt on näidatud joonisel.
Kauguse mõõtmine ultrahelianduri projekti vooluringi plokkskeemi abil on näidatud allpool toodud plokkskeemil. See koosneb erinevatest plokkidest, nagu toiteplokk, LCD-ekraan, ultrahelimoodul, objekt, mille kaugust tuleb mõõta, ja 8051 mikrokontrollerit .
Selles projektis kasutatud ultraheli muundur koosneb ultraheli saatjast ja vastuvõtjast. Ultraheli saatjast edastatud lained peegelduvad objektilt tagasi ultraheli vastuvõtjale. Nende lainete saatmiseks ja vastuvõtmiseks kuluv aeg arvutatakse heli kiiruse abil.
Puudutage sensorit
Puuteandureid saab määratleda lülititena, mis aktiveeritakse puudutusega. Puutetundlikke andureid on erinevat tüüpi, mis klassifitseeritakse vastavalt puudutuste tüübile, näiteks mahtuvuse puutelüliti, takistus puutelüliti ja pieso puutelüliti.

Puudutage sensorit
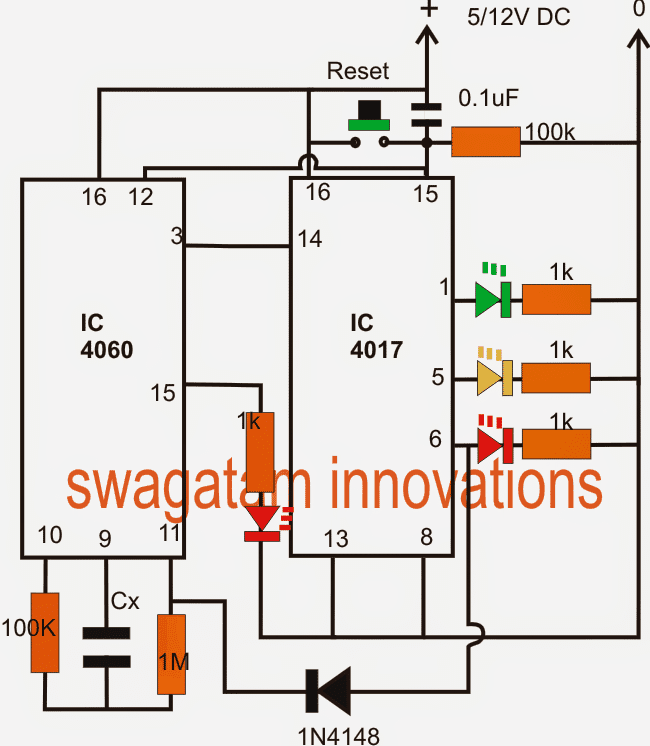
Puudutage sensori vooluahelat
Vooluring tähistab puuteanduri lihtsat rakendust, mis koosneb 555 taimerist, mis töötab monostabiilses režiimis, puuteandurist või -plaadist, LED-st, akust ja põhilistest elektroonikakomponentidest.

Puudutage sensori vooluahelat
Vooluring on ühendatud ülaltoodud joonisel näidatud viisil. Tavalises olekus, kui puuteplaati ei puudutata, jääb LED välja. Kui puuteplaati on puudutatud, antakse 555 taimerile signaal. Tundes puuteplaadilt saadud signaali, aktiveerib taimer 555 LED-i ja seega süttib LED, mis näitab puutetundliku anduri või plaadi külge tehtud puudutust.
Puutetundliku anduri praktiline rakendamine
Puutetundlik koormus on mõeldud koormuse juhtimiseks. Puutetundliku juhtimisega koormuslüliti projekti voolu komplekt on näidatud joonisel.
Puuteanduri põhimõttel põhinev puutejuhtimisega koormuslüliti koosneb erinevatest plokkidest, nagu toiteplokk, 555 taimerit , puutetundliku anduri plaat või puuteplaat, relee ja koormus, nagu on näidatud puutejuhtimisega koormuslüliti plokkskeemil.
Vooluringis kasutatavad 555 taimerit on ühendatud monostabiilses režiimis, mida kasutatakse relee juhtimiseks koormuse sisselülitamiseks kindla aja jooksul. Taimerite 555 päästik on ühendatud puuteplaadiga, seega saab puudutusega käivitada 555 taimerit. Alati, kui 555 taimerit käivitatakse puudutusega (pinge areneb inimese keha puudutamisel), annab see kindla ajavahemiku jooksul kõrge loogika. Seda fikseeritud aja intervalli saab muuta, muutes taimeriga RC ajakonstandi ühendust. Seega ajab taimer 555 väljund koormuse läbi relee ja koormus lülitub kindla aja jooksul automaatselt välja.
Samamoodi saame arendada lihtsaid ja uuenduslikke elektri- ja elektroonika projektid kasutades täiustatud andureid, näiteks PIR-anduritel põhinevat automaatset ukse avamissüsteemi. Rõhuanduril põhinev elektrienergia tootmine, mida saab rakendada piesoelektriliste plaatide (need on ühte tüüpi rõhuandurid) paigutamisega kiirteelüliti alla maanteedele, et toota elektrit maanteede tänavavalgustite jaoks. Lähedusanduril põhinev lähedusdetektori vooluring.
Nüüd laseme edasi liikuda ja tundma andurite tüüpe, mis põhinevad igal domeenil, näiteks IoT-s, robootikas, ehituses ja paljudes tööstusharudes.
IoT andurid
IoT on platvorm, kus viimasel ajal on see kõigi tehnoloogiaga seotud asjade keskne ulatus. IoT ülesanne on edastada mitut tüüpi teavet ja intelligentsust, rakendades mitmesuguseid andureid. Need andurid töötavad teabe kogumiseks, selles toimimiseks ja mitme ühendatud seadme vahel jagamiseks. Kogu kogutud teabe põhjal võimaldavad andurid automaatset funktsioneerimist ja tehnoloogia nutikamaks muutmist. Allpool on tüüpi andureid IoT-s domeen.
Lähedusandurid
Seda tüüpi IoT-sensor, kus ta tuvastab ümbritseva objekti olemasolu või olematuse või leiab objekti omadused. Seejärel teisendab tuvastatud signaali kasutajale arusaadavaks vormiks või võib olla lihtne elektrooniline seade, mis ei puutu temaga kokku.

Lähedusanduri ahel
Lähedusandurite rakendus on peamiselt jaemüügis, kus nad saavad teada toote ja tarbija vahelist liikumist ja seost. Selle kasutajad saavad kiireid teateid allahindluste värskenduste ja huvitavate toodete eksklusiivsete pakkumiste kohta. Ja teine domeen on autodes.
Näiteks kui tagurdate auto, tagantjärele leides saab helisid ja siin rakendatakse lähedussensori tööd.
Lähedusandureid on palju muud tüüpi ja need on:
- Mahtuvusandurid
- Induktiivandurid
- Fotoelektrilised andurid
Keemiline andur
Neid andureid rakendatakse erinevates tööstusharudes. Nende andurite põhieesmärk on tähistada mis tahes muutusi vedelikus või tuvastada õhukemikaalide kõikumisi. Neid rakendatakse otsustavalt suuremates linnades, kuna on oluline otsida muudatusi ja tagada elanikkonnale ohutus.
Keemiliste andurite olulist rakendamist võib näha kaubanduslikus õhuvaatlustes ja protsesside juhtimises, milleks võivad olla kas tahtlikult või tahtmatult arenenud kemikaalid, ohtlik või radioaktiivne kokkupuude, korduvkasutatavad toimingud kosmosejaamades, farmaatsiatööstuses ja paljud teised.
Kõige sagedamini kasutatakse keemilisi andureid
- Elektrokeemilise gaasi tüüp
- Keemiline FET
- Chemi takisti
- Mittehajuv IR
- pH klaasist elektroodi tüüp
- Tsinkoksiid nanorood
- Fluorestsentskloriidi tüüp
Gaasiandur
Need on peaaegu samad kui keemilised andurid, kuid neid rakendatakse ainult õhu kvaliteedi muutuste jälgimiseks ja erinevat tüüpi gaaside olemasolu väljaselgitamiseks. Sarnaselt keemiliste anduritega kasutatakse neid mitmetes valdkondades, nagu põllumajandus, tervishoid, tootmine ja neid kasutatakse õhukvaliteedi jälgimiseks, mürgise või tuleohtliku gaasi tuvastamiseks, ohtliku gaasi järelevalveks söetööstuses, nafta- ja gaasitööstuses, keemialabori uurimine, tehnika - värvid , plasti, kummi, ravimite ja naftakeemia jt.
Mõni enim kasutatav gaasiandur on
- Vesiniku tüüp
- Osooni seire tüüp
- Hügromeeter
- Süsinikdioksiidi andur
- Elektrokeemiline gaasiline tüüp
- Katalüütiline helmestüüp
- Õhusaaste tüüp
- Süsinikmonooksiidi tuvastamise tüüp
- Gaasi tuvastamise tüüp
See on kõik gaasi- ja keemilised andurid ja nende tüübid.
Niiskusandurid
Niiskus on mõiste, mis on määratletud kui aurukogus, mis eksisteerib atmosfääriõhus või muudes gaasilistes ainetes. Niiskusandurid peavad tavaliselt kinni temperatuuriandurite kasutamisest, kuna enamik tootmistoiminguid vajab täpseid töötingimusi. Niiskuse mõõtmise abil saab veenduda, et kogu protseduur kulgeb hõlpsalt ja kui toimub järsk muutmine, toimivad need viivitamatult, kuna need andurid tuvastavad variatsiooni kiiremini.
Paljudes valdkondades, näiteks elamu-, äri-, kasutavad neid niiskuse andureid kütte-, ventilatsiooni- ja jahutusotstarbel. Isegi neid andureid saab jälgida paljudes muudes valdkondades, nagu maalimine, haiglad, farmaatsia-, meteoroloogia-, auto-, kasvuhoonete- ja pinnatööstused.
Neid kasutatakse peamiselt tüüpi andureid IoT-s domeen.
Andurid robootikas
Andurid omavad robootikatööstuses suuremat tähtsust, kuna võimaldavad robotit ümbritsevast keskkonnast teavitada ja hõlbustavad sellega vajalike toimingute tegemist. Ilma nende andurite rakendamiseta saavad robotid teha ainult üksikuid monotoonseid tegevusi, mis piiravad robotite võimekust.
Kõigi nende võimete korral saavad robotid teha palju kõrgetasemelisi toiminguid. Arutagem täpsemalt erinevate teemade üle tüübid andurid robootikas .
Kiirenduse andur
Seda tüüpi andureid kasutatakse nurga- ja kiirendusväärtuste arvutamiseks. Kiirenduse arvutamiseks kasutatakse peamiselt kiirendusmõõturit. Kiirendusmõõturile avalduvat mõju on kahte tüüpi ja need on:
Staatiline jõud - See on hõõrdejõud, mis eksisteerib kahe objekti vahel. Gravitatsioonijõu arvutamise abil saab teada roboti kallutusväärtust. See arvutus on abiks robotite tasakaalustamiseks või teadmiseks, kas robotil on liikumine ülesmäge või tasasele servale.
Dünaamiline jõud - Seda mõõdetakse kui kiirenduse hulka, mis on vajalik objekti liikumiseks. Dünaamilise jõu arvutamine kiirendusmõõturi abil määratleb roboti liikumise kiiruse või kiiruse.
Need kiirendusmõõturi andurid on saadaval mitmes konfiguratsioonis. Valiku tüüp sõltub tööstusharu nõudest. Mõned parameetrid, mida tuleb enne anduri õiget valimist kontrollida, on ribalaius, digitaalse või analoogväljundi tüüp, telgede koguarv ja tundlikkus.
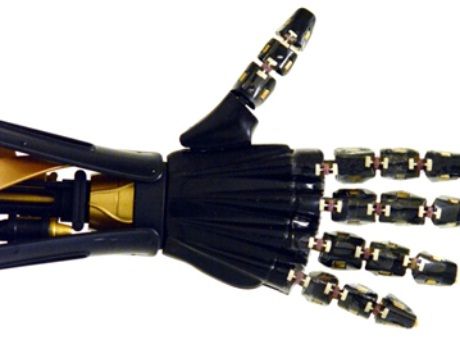
Alloleval pildil on näidatud kiirendusanduri skemaatiline diagramm.

Heliandur
Need andurid on tavaliselt mikrofoniseadmed, mida kasutatakse heli tundmiseks ja vastava pingetaseme edastamiseks tuvastatud helitaseme põhjal. Helisensori juurutamisega saab väikse roboti valmistada navigeerimiseks sõltuvalt vastuvõetud heli tasemest.
Valgusanduritega võrreldes on heliandurite projekteerimisprotsess mõnevõrra keeruline. Seda seetõttu, et heliandurid annavad väga minimaalse pinge erinevuse ja seda tuleb mõõdetava pingemuutuse saamiseks võimendada. Helianduri lülitusahel on näidatud allpool:

Valgusandur
Valgusandurid on omamoodi andurid, mida kasutatakse valguse tuvastamiseks ja mis genereerib pingemuutuse, mis on sama kui valguse valgusandurid .
Robootikatööstuses on peamiselt kahte tüüpi andureid, milleks on fototakisti ja fotogalvaaniline andur. Isegi on olemas muud tüüpi valgusandureid, mida pole eriti rakendatud, näiteks fototransistor ja fototorud.
Fototakisti
See on omamoodi takisti, mida kasutatakse peamiselt valguse tuvastamiseks. Selles muutub takistuse väärtus vastavalt valguse intensiivsustasemele. Fototakistusele langev valgus on fototakisti takistuse väärtusega pöördvõrdeline. Enamikul juhtudel nimetatakse fototakisti isegi LDR-ks, mis on valgust sõltuv takisti. Fototakisti lülitusskeem on näidatud järgmiselt:
Fotogalvaanilised elemendid
Fotogalvaanilised elemendid on energia muundamise seadmed, mida kasutatakse päikesekiirguse muundamiseks elektrienergiaks. Neid kasutatakse peamiselt päikeserobotite tootmisprotsessis. Eraldi fotogalvaanilisi elemente võetakse arvesse energiaallikaseadmetena, mis on rakendus, mis on ühendatud nii kondensaatorite kui ka transistoridega, ja nad saavad selle muuta anduriseadmeks.
Taktiilsed andurid
See on anduritüüp, mis määrab kontakti, mis on anduri ja objekti vahel. Taktiilseid andureid rakendatakse tõenäoliselt igapäevastes olukordades, näiteks lampides, mis tuhmuvad või suurendavad heledust, puudutades nende alust ja tõstenuppe. Lisaks on palju kombatavaid andureid, kus inimesed pole täpselt teadlikud. Peamised kombatavate andurite tüübid on
Puudutage sensorit
See on andur, mis hoiab ära objekti ja anduri puudutamise tajumise ja tuvastamise. Mõned seadmed, kus puutetundlikke andureid kasutatakse, on piiramislülitid, mikrolülitid ja muud. Kui mõni pistikutest puutub kokku mõne tahke sektsiooniga, on see seade käepärasem ja see peatab robotliikumise. Lisaks kasutatakse seda kontrollimiseks, kui selle suuruse mõõtmiseks kasutatakse sondi.
Jõuandur
Seda kasutatakse mitme operatsiooni, näiteks masina mahalaadimise ja laadimise, materjali kandmise ja muude robotite käitatavate jõudude väärtuste mõõtmiseks. Seda sensorit kasutatakse probleemide analüüsimiseks laialdaselt ka kokkupanekul. Selles anduris on rakendatud mitmeid lähenemisviise, näiteks liigesetaju, puutetava massiivi tajumine.
Peale nende on paljudes tööstusharudes mitut tüüpi andureid. Andke meile kiire ülevaade neist:
Ehitistes kasutatavate andurite tüübid
Ehitustööstuses kasutatakse peamiselt andureid:
- Temperatuuriandurid
- Liikumistuvastuse andurid
- Elektrilised pinge- ja vooluandurid
- Suitsu ja tule tuvastamise andurid
- Kaamera andurid
- Gaasiandurid
Andurite tüübid kaugseires
Kaugseire andureid on peamiselt kahte tüüpi ning need on aktiivsed ja passiivsed andurid.
Aktiivsed andurid
Need genereerivad asjade ja asukohtade skaneerimiseks energiat ning seejärel tuvastab andur ja arvutab sihtobjektist tagasi hajutatud või peegeldunud kiirguse hulga. Aktiivsete andurite näideteks on RADAR ja LIDAR, kus ajavahe, mis on heitmisprotsessi ja tagasivooluprotsessi vahel, arvutatakse ala, kiiruse ja objekti suuna määramise teel.
Passiivsed andurid
Need andurid koguvad kiirgust, mida ümbritsevad asukohad või objekt kiirgavad või peegeldavad. Passiivse anduri kõige olulisem näide on peegeldunud päikesevalgus. Ja muud näited on radiomeetrid, laenguga seotud objektid, infrapuna- ja filmikaameratööd.
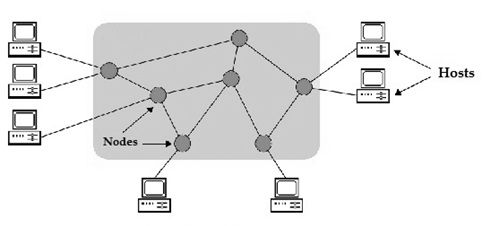
Andurite klassifitseerimine kaugseires on

Andurite tüübid kaugseires
Kujundamiseks erinevat tüüpi anduritel põhinevad ahelad elektroonikaprojektide kujundamiseks saate ise alla laadida meie tasuta e-raamatu. Samuti võite pöörduda meie poole tehnilise abi saamiseks, postitades oma ideed allpool olevasse kommentaaride jaotisesse. Siin on teile küsimus, millised on muud tüüpi andurid ja peamiselt vooluandurite vooluahela kujundus ?