Selles postituses õpime tagasikäigu taimerite ahelat eelistatud liikumiskomplektiga inkubaatori mootori mehhanismi käitamiseks. Idee soovis hr Anwar
Tehnilised kirjeldused
Olen Indoneesiast ..... vajan suure pöördemomendiga mootoriga inkubaatori taimeri skeeme (alalisvoolumootori aken autos). Püüan saada alalisvoolumootorit töötama kahes suunas, kuni see jõuab lõppasendisse, seejärel peatage ja lülitage polaarsus, nii et see töötab toite uuesti kasutamisel teises suunas. Seejärel tehke sama asja teises otsas.
1. taimer lülitab toite 1 minutiks sisse. (7: 00–7: 01)
2. mootor töötab ühes suunas, kuni jõuab stoppasendini, ütleme 30sek.
3. mootori toide lülitub välja, kui see jõuab seisuasendisse ja viibib 1 minuti jooksul. taimer voolu lõpetamiseks / väljalülitamiseks. muudab ka polaarsuse nii, et.
4. järgmine kord, kui peataimer sisse lülitatakse (10: 00-10: 01), doseerib see sama asja vastupidises suunas ja pidevalt korrates
5. 12 VDC mootori tagurpidi (ainult kaks kaablit mootorist + ja -)
6. Vajad Led-indikaatorit mootori Rev / Fwd jaoks
Kas saate mind aidata, sir?
Tänan teid eelnevalt abi eest.
See on oluline koduprojekt, mis peab olema 100% usaldusväärne.
Kujundus

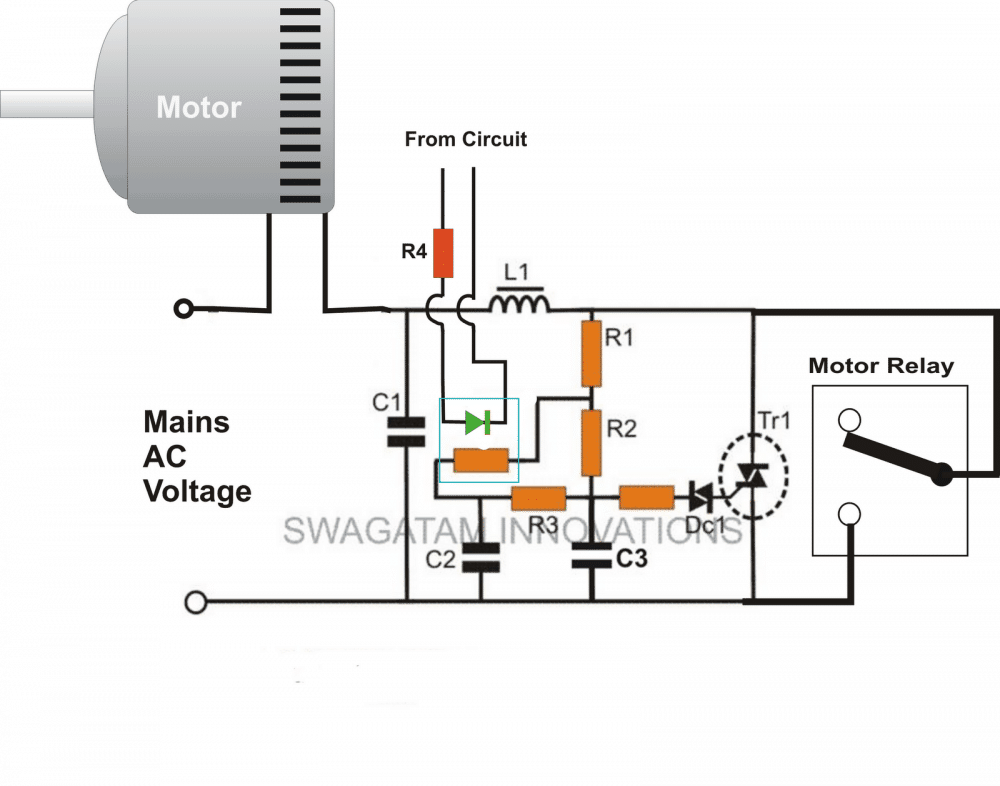
Ülaltoodud joonisel võime visualiseerida kavandi inkubaatori mootori ettepoole suunatud liikumise rakendamiseks pärast ettemääratud ajavahemikku.
Praegu, kui toide on sisse lülitatud, on meil järgmine stsenaarium:
Komplekti „magnetlüliti” võib eeldada, et see on deaktiveeritud või vajutatud, kui mootor või kavandatud inkubaatorimehhanism on nullkäivitusasendis.
Pange tähele, et eelistatavalt tuleks „set” / „reset” lülitid rakendada magnetiliste pillirooglülititega.
Kui toide on sisse lülitatud, lähtestatakse IC 4060 C2 kaudu nii, et see käivitaks selle loendamise nullist ja pin3 muudetaks nulliloogikaks.
See algne nullloogika suunatakse C3 kaudu T1 alusele, mis sunnib T3 ja sellega seotud relee koheselt aktiveerima. R7 tagab protsessi T1 / T3 selles režiimis lukustumise.
Selles punktis toimib DPDT relee oma N / O kontaktidega, käivitades mootori ja mehhanismi oletatava liikumise suunas.
Niipea, kui mootor hakkab liikuma, vabastatakse nupp „Seadista“ nii, et T4 ja ülemine SPDT saavad võimaluse käivitada, kusjuures SPDT relee saavutab N / O asendivahetuse, muutes ooterežiimil DPDT N / C kontaktid varustus ..
Mootor ja / või mehhanism liiguvad seni, kuni see on saavutanud lähtestusasendi, mille tõttu T2 aktiveerib ja purustab T1 / T4 riivi.
Kui T4 on välja lülitatud, muudab DPDT relee oma positsiooni N / O asendist N / C ja tagab mootori mehhanismile vastupidise (vastupidise) liikumise.
Inkubaatori mootori mehhanism pöörab nüüd oma suuna ja käivitab tagasikäigu, kuni see on jõudnud seatud punkti, mis lülitab T4 baasajami kiiresti välja, SPDT lülitab DPDT lõikevõime välja ja kogu mehhanism seisab paigal .
Vahepeal jätkab IC 4060 loendamist, kuni ta on jälle saavutanud nullloogika pärast seda, kui ta on oma pin3-l kõrge loogika läbinud (tühjendades C3).
Tsükkel saab taas alguse ja kordab protseduuri, nagu eespool selgitatud.
Eelmine: LED-i vilkumine Arduinoga - täielik õpetus Järgmine: Uuritud suure võimsusega tööstusliku toitevõrgu ülepinge summutit