Sellel ajastul tööstusautomaatika , roboteid kasutatakse tootmise täpse ja parema kvaliteedi saavutamiseks mitmesuguste protsesside käitlemiseks. Ideaalse mootori valimine täiusliku roboti jaoks on roboti väljatöötamisel spetsiaalselt tööstusharude jaoks alati raske ülesanne. Õige valimine elektrimootorid tööstusrobotites nõuab käte juhtimise, asendi, nurga- ja sirgjooneliste liikumiste arvessevõtmiseks mitmeid parameetreid.

Tööstusrobotikas kasutatavad mootorid
Mootorivalik on robootikaharrastajate jaoks kõige vähem mõistetav kontseptsioon, mis nõuab strateegiat ja tõsist analüüsi. See hõlmab roboti kiiruse, kiirenduse, pöördemomendi nõuete määramist vastavalt roboti kaalule, ratta suurusele ja rakendusele, kus seda rakendada. Mootoreid on mitut tüüpi on tänapäeva turul saadaval, kuid enamasti Tiny pager mootorid, servomootorid , lineaarmootorid, samm-mootorid ja alalisvoolumootoriga mootoreid kasutatakse tööstusrobotites vastavalt nende kasutusvaldkonnale.
Mootori vale valimine lõpeb puuetega robotiga, mis tüüpi mootor sobib kõige paremini ja paremini, et tööstusrobotid oleksid tõelised, täpsed ja piisavad kõigi tööstusprotsesside vajaduste rahuldamiseks, pidades silmas kõiki realistlikke spetsifikatsioone?
Siinkohal kogusime tööstustöötajatelt nende mootorite kohta mõningaid teadmisi vastava mootori valimiseks tööstuslikuks kasutamiseks.
Soovitame teil järgida ekspertide arvamusi, mille eesmärk on pakkuda tööstusliku robootika jaoks parimaid mootoreid koos saadaolevate alalisvoolu-, samm-, harja- ja servomootoritega, et robot saaks täpselt, kulutõhusalt ja usaldusväärselt liikuda.
Ch.Sampath Kumar
M.tech VLSI disainis
Tehnilise sisu kirjutaja
 Alalisvoolumootorid on pideva töö jaoks saadaval laias vahemikus, kuid see nõuab käiguvahetust vastavalt vastava rakenduse jaoks. Sammmootor ei vaja käiguvahetust, kuna selle astmeline töö tagab kindlaksmääratud rakenduste jaoks väikese kiiruse. Lõpuks kasutatakse servomootoreid täpseks ja täpseks juhtimiseks, mida rakendatakse suletud ahelaga operatsioonides. Kuid see nõuab täiendavat tagasisidet ja juhtimisahelat, nii et see on kallis kui alalisvoolu- ja samm-mootor. Nii et servomootorid muudavad roboti oma täpse liikumise tõttu usaldusväärsemaks.
Alalisvoolumootorid on pideva töö jaoks saadaval laias vahemikus, kuid see nõuab käiguvahetust vastavalt vastava rakenduse jaoks. Sammmootor ei vaja käiguvahetust, kuna selle astmeline töö tagab kindlaksmääratud rakenduste jaoks väikese kiiruse. Lõpuks kasutatakse servomootoreid täpseks ja täpseks juhtimiseks, mida rakendatakse suletud ahelaga operatsioonides. Kuid see nõuab täiendavat tagasisidet ja juhtimisahelat, nii et see on kallis kui alalisvoolu- ja samm-mootor. Nii et servomootorid muudavad roboti oma täpse liikumise tõttu usaldusväärsemaks.
Viswanath Prathap
M.Tech elektrienergeetikas
Tehnilise sisu kirjutaja

Valige ja asetage roboteid tavaliselt tööstusharudes, et valida objekt ühest kohast või kohast ja paigutada see teise asukohta või kohta. Selleks on vaja kontrollida robotite liigeste nurkliigutusi, mida saab saavutada servomootorite abil. Neid servomootoreid juhitakse PWM-i andmete abil, mille robotkontroller annab robotite liigeste käivitamiseks. Servomootorid on võimelised genereerima piisavalt pöördemomenti, et objekti kiiresti seiskamisasendist kiiresti liigutada. Seega kasutatakse neid ratastena sõjaväe- ja tööstusrobotites. Astmemootoreid võib kasutada ka positsiooni juhtimiseks, kuid need tarbivad energiat isegi puhkeperioodil lihtsalt lukustamiseks ja käsuasendi hoidmiseks. Niisiis kasutatakse servomootoreid tavaliselt tööstuslikus robootikas samm-mootorite suure jõudlusega asendajana.
S. Naresh Reddy
M.tech sisseehitatud süsteemis
Projekti juhend
Mehaanilise roboti ülesehitust tuleb kontrollida perfo järgi  rm ülesanne. Roboti juhtimiseks on kolm erinevat faasi, näiteks taju, töötlus ja tegevus. Andurid annavad robotile teavet selle liigeste asukoha ja selle lõpptulemuse kohta, seejärel töödeldakse seda teavet juhtplokile ja arvutatakse mehaaniliselt liikuvale mootorile sobiv signaal. Valdav osa robotitest kasutab elektrimootoreid. Kaasaskantavates robotites kasutatakse korduvalt harjadeta ja harjatud alalisvoolumootoreid ning tööstusrobotites vahelduvvoolumootoreid. Neid mootoreid eelistatakse kergema koormusega süsteemides ja kus valdav liikumisvorm on pöörlev.
rm ülesanne. Roboti juhtimiseks on kolm erinevat faasi, näiteks taju, töötlus ja tegevus. Andurid annavad robotile teavet selle liigeste asukoha ja selle lõpptulemuse kohta, seejärel töödeldakse seda teavet juhtplokile ja arvutatakse mehaaniliselt liikuvale mootorile sobiv signaal. Valdav osa robotitest kasutab elektrimootoreid. Kaasaskantavates robotites kasutatakse korduvalt harjadeta ja harjatud alalisvoolumootoreid ning tööstusrobotites vahelduvvoolumootoreid. Neid mootoreid eelistatakse kergema koormusega süsteemides ja kus valdav liikumisvorm on pöörlev.
Suresh megaji
M. Tech traadita sidesüsteemides
Tehnilise sisu kirjutaja

Kui soovite tegeleda robootikaga ja nende rakendamisega tööstuses, peaksite teadma robootikas kasutatavate mootorite kohta, sest robootika sõltub peamiselt mootoritest. Põhimõtteliselt kasutatakse robootikamasinaid erinevate rakenduste jaoks tootmises. Erinevaid 'mootoreid', nagu DC, impulss-, samm-sammuga, optiline ajam, osalise pöörde ja halli efektiga mootorid jne ... kasutatakse koos mõne tehnikaga, et neid tööstuses rakendada ja sõbralikuks muuta.
- Alalisvoolumootoreid kasutatakse akule orienteeritud rakenduste, aeglasema kiiruse ja liikuvuse rakenduste jaoks.
- Kõikjal, kus vajame pöörlemisele suunatud rakendust, võime kasutada Stepperi mootoreid, nagu unipolaarseid ja bipolaarseid mootoreid.
- Pea ja käe liikumiseks võime kasutada osalise pöörde mootoreid.
- Kui tahame kasutada magnetvälju, saame kasutada Halli efekti ja optilise draivi mootoreid jne.
Nutikaid mootoreid kasutava robootika abil saame säästa raha, aega, ruumi, ohtlikke liikumisi jne.
Ajay Sahare
Turundusjuht

Tööstusroboteid kasutatakse tööstuslikus tootmiskeskkonnas. Need on õlad, mis on spetsiaalselt välja töötatud selliste rakenduste jaoks nagu keevitamine, materjalide käitlemine, värvimine ja muud.
Kõiki tööstuskeskkonnas kasutatavaid mehhatroonilisi seadmeid ei saa pidada robotiteks. Vastavalt ISO (Rahvusvaheline Standardiorganisatsioon) määratlusele peetakse tööstusrobotiks automaatselt juhitavat, ümberprogrammeeritavat, mitme või mitme teljega programmeeritavat mitmeotstarbelist manipulaatorit.
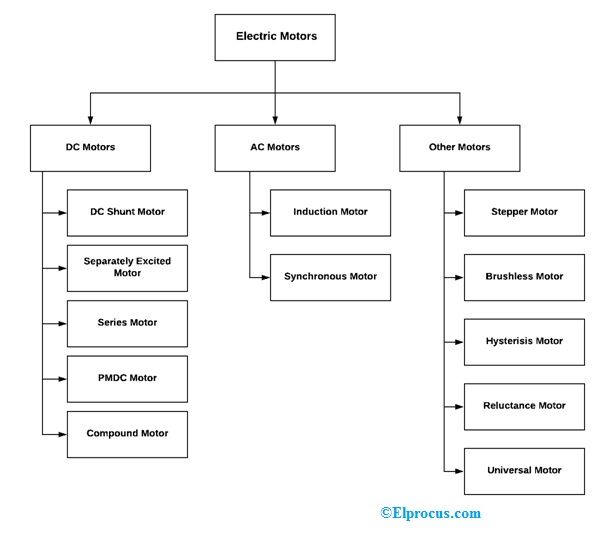
Tööstusrobotikas kasutatavad mootorid on
- Vahelduvvoolumootorid
- Alalisvoolumootorid
- Servomootorid
- Sammumootorid.
1. Vahelduvvoolumootoreid saab edasi jagada asünkroon- ja sünkroontüüpideks. Näiteks on induktsioon-vahelduvvoolumootor asünkroonse tüüpi seade, mis koosneb põhiliselt traadiga keritud staatorist ja rootorist. Toide on ühendatud juhtmega ja selle kaudu voolav vahelduvvool indutseerib keeratud traadis elektromagnetvälja (EM), piisavalt tugeva väljaga, mis tagab rootori liikumise jõu. Sünkroonmootorid on püsikiirusega mootorid, mis töötavad sünkroonis vahelduvvoolu liinisagedusega ja mida kasutatakse tavaliselt seal, kus on vaja täpset püsikiirust.
2. Paljudes tööstuslikes rakendustes, sealhulgas robootikas, kasutatakse alalisvoolumootoreid sageli kiiruse ja suuna reguleerimise lihtsuse tõttu. Need on võimelised lõpmatul kiiruste vahemikul, alates täiskiirusest kuni nullini, laia koormusvahemikuga.
Kuna alalisvoolumootoritel on suur pöördemomendi ja inertsi suhe, saavad nad reageerida juhtimissignaalide muutustele kiiresti. Alalisvoolumootorit saab sujuvalt juhtida nullliikumiseni ja kiirendada koheselt vastassuunas, ilma et oleks vaja keerukaid toitelülituslülitusi. Püsimagnetiga harjadeta alalisvoolumootorid on tavaliselt kallimad kui harjatüübid, ehkki need võivad pakkuda eeliseid energiatarbimise ja töökindluse osas.
Ilma kommutaatorita saavad harjadeta mootorid töötada tõhusamalt ja suurema kiirusega kui tavalised alalisvoolumootorid. Enamik harjadeta alalisvoolumootoreid töötab trapetsikujulise vahelduvvoolu lainekujul, kuid mõned mootorid töötavad siinuslainetega. Siinuselainega juhitavad harjadeta mootorid suudavad madala pöördemomendi pulsatsiooniga sujuvalt töötada madalamatel pööretel, muutes need ideaalseks lihvimiseks, katmiseks ja muudeks rakendusteks, näiteks pinna viimistlemiseks.
Harjatud alalisvoolumootorite korral võite kasutada pulsilaiuse modulatsiooni (PWM), kui soovite, et teie mootor pöörleks aeglasemalt, ilma et see kaotaks võimsust. See tähendab põhimõtteliselt mootori väga kiiret sisse- ja väljalülitamist. Nii pöörleb mootor väiksema kiirusega, justkui rakendataks väiksemat pinget, hoolimata võimsusest.
Põhimõtteliselt on harjatud alalisvoolumootori tekitatud pöördemoment liiga väike ja kiirus liiga suur, et sellest kasu olla. Niisiis kasutatakse kiiruse vähendamiseks ja pöördemomendi suurendamiseks tavaliselt käiguvahetusi.
3. Servomootoreid kasutatakse digitaalse kontrolleriga suletud ahelaga süsteemides. Kontroller saadab kiiruse käsklused juhi võimendile, mis omakorda toidab servomootorit. Mõnes vormis tagasisideseade, näiteks eraldusvõime või kooder, annab teavet servomootori asukoha ja kiiruse kohta. Lahuti või kooder võib olla mootoriga integreeritud või asuda kaugjuhtimisega. Suletud ahelaga süsteemi tõttu saab servomootor töötada konkreetse kontrollerisse programmeeritud liikumisprofiiliga.
4. Samm-mootorid võivad töötada tagasisidega või ilma, mootori pöörlemine on jaotatud väikesteks nurkadeks. Seda juhitakse impulssidega käsusignaalide abil ja see võib peatuda täpselt kästud punktis, ilma et oleks vaja pidureid ega sidurikoostu. Voolu eemaldamisel jääb püsimagnetiga samm-mootor üldjuhul viimasesse asendisse. Mitut samm-mootorit saab sünkroonis hoida, juhtides neid ühisest allikast.
Dev desai
Turundusjuht 
Kui plaanite robootikaga tegeleda, peate tutvuma paljude saadaolevate mootoritüüpidega. Kogu robootika liikumine toimub ühel või teisel viisil mootoriga, seega on oluline teada, milline on teie valik.
Alalisvoolumootorid
Alalisvoolumootori liikumissuuna määrab lisaks patareiga töötamisele sisendpinge polaarsus. See on robotifunktsioonide jaoks absoluutselt vajalik. Õnneks on seda tüüpi mootoreid väga erinevates mõõtudes, pingenõuetega ja see on saadaval kõikjal.
Erinevat tüüpi mootorid on allpool toodud
- Liikuvusbaasi mootor
- Kiire hobimootor
- Rihmülekandega mootor
- Pesuauto mootor
- Pulss töötab
- Arm kohandatud mootor
- Bipolaarne stepper koos osutiga
Bio mootor
Bio-metall on hämmastav aine, mis on eksisteerinud juba paar aastat ja sellel on robootika valdkonnas mitmeid rakendusi. Joonisel näeme, et bio-metalltraadi tükk kahaneb viis protsenti oma pikkusest, kui sellele rakendatakse vaid paar volti. Pärast aastaid kestnud katsetamist on biojuhe osutunud tugevaks, usaldusväärseks ja uute toodete ilmnemisel muutub see üha kasulikumaks. Selle mõnevõrra aeglasem reageerimisaeg muudab selle ideaalseks käte ja kätega robotirakenduste jaoks, kus jerkimine oleks problemaatiline. Pikk traaditükk võib robotkäe kogu pikkuses venitades tekitada märkimisväärse liikumise. Praegu on kommertsturul robotmetallist komplektid, mis kasutavad biometalli.
Releed
Robootikas kasutatavat releed kasutatakse peaaegu alati mootorite jaoks mõeldud võimsuse eraldamiseks arvuti funktsiooni toiteallikast. Mootorid esitavad madala impedantsi tõttu toiteallikatele suuri nõudmisi ja tekitavad mitmeid tõrkeid, mida arvutid ei talu. Seetõttu on lihtsalt mootorite jaoks hea kasutada eraldi suurt vooluallikat.
Solenoidid
Solenoide on kõige parem kasutada manipulaatori juhtimisseadmetena või operaatori vahetamiseks. Nende liikumine on kiire ja tugev, nii et haaratsites kasutatakse tegevuse pehmendamiseks peaaegu alati vedru. Nagu jooniselt näha, kasutatakse haaratsite sulgemiseks juhtmeid. Need juhtmestikud võivad toimida ka tagasivedrudena. Selliseid haaratsid leiavad rohkem tootmisliinitööd, kus ülesanne on väga mõõdetud ja hõlmab kitsaid parameetreid.
Sekundaarsed funktsioonid
Enamik motoorsetest funktsioonidest on seotud liikuvuse, käe, pea või mõne muu nähtava välise liikumisega, kuid mõned motoorsed liikumised pole nii nähtavad. Suured tööstusrobotid kasutavad hüdraulikasüsteemi töörõhu tekitamiseks hüdrosüsteeme, mis kasutavad pumbamootoreid. Mootorite teine oluline kõrvalfunktsioon on juhitav reguleerimine. Täpsuse parandamiseks on mootoritega liidetud potentsiomeetrid tavaliselt mitme pöördega seadmed.
Järeldus
Robotid võivad olla väga keerulised seadmed, mis vajavad mitmesuguseid mootoriga liikumisi. Selle artikli eesmärk on anda ülevaade seadmete hulgast, millega võite robotiehitajana tegeleda. Alustuseks oleks hea uurida robotvarustuse tarnijaid ja saadaolevaid tarvikuid. Praegu on saadaval tohutul hulgal tooteid ja Internet muudab selle leidmise, tundmaõppimise ja kasutamise lihtsaks. Olenemata teie vajadustest, peaks väike leidlikkus ja otsusekindlus, mis kõigil robotiehitajatel näib olevat, teid teenima.
Samadan Wandre
Turundusjuht
'Robootikas kasutatavad mootorid'
- Liikuvusbaasi mootor

- Kiire hobimootor
- Rihmülekandega mootor
- Pesuauto mootor
- Pulss töötab
- Arm kohandatud mootor
- Bipolaarne stepper koos osutiga

Suuremad mootorid sobivad kõige paremini liikumisaluste jaoks, mis võimaldavad robotitel maastikul manööverdada. Mõni neist mootoritest on varustatud käigukastidega, et saavutada liikumiseks vajalik aeglasem kiirus ja pöördemoment. Pinge langetamine mootorile võib selle aeglustada ka soovitavamale kiirusele. Ainult katsetamise abil saab kindlaks teha, kas teie mootor töötab madalama pingega. Kui see juhtub, olete säästnud palju probleeme, kui mitte, on mootorite aeglustamiseks muid võimalusi. Mõningaid kiiremootoreid saab kasutada, kui kasutatakse uss- või kruvihammasrattaid.
Keeratava hammasratta näidet võib näha robotkäsi joonisel. Kui mootor pöörleb päripäeva, tõmmatakse poldisõlm mootori külge ja õlg tõmbub kokku ning vastupäeva pöörates sirutub õlg välja. Kuigi mootori võll pöörleb kiiresti, on käe tegevus kruvi vähendamise tõttu märkimisväärselt aeglasem. Selles järgmises mootori vooluahela joonisel näeme alalisvoolumootorit, mida juhib võimsustransistor. Relee lüliti (Double Pole Double Throw) määrab suuna. Transistor Q1 peaks olema võimsustransistor, mis võtab vastu mootori suurt koormust.
Impulssmootorid
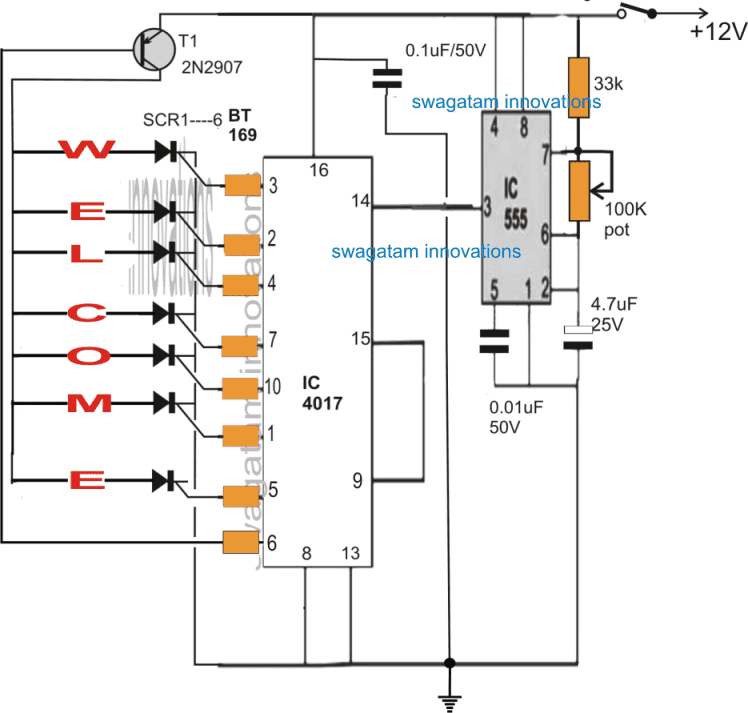
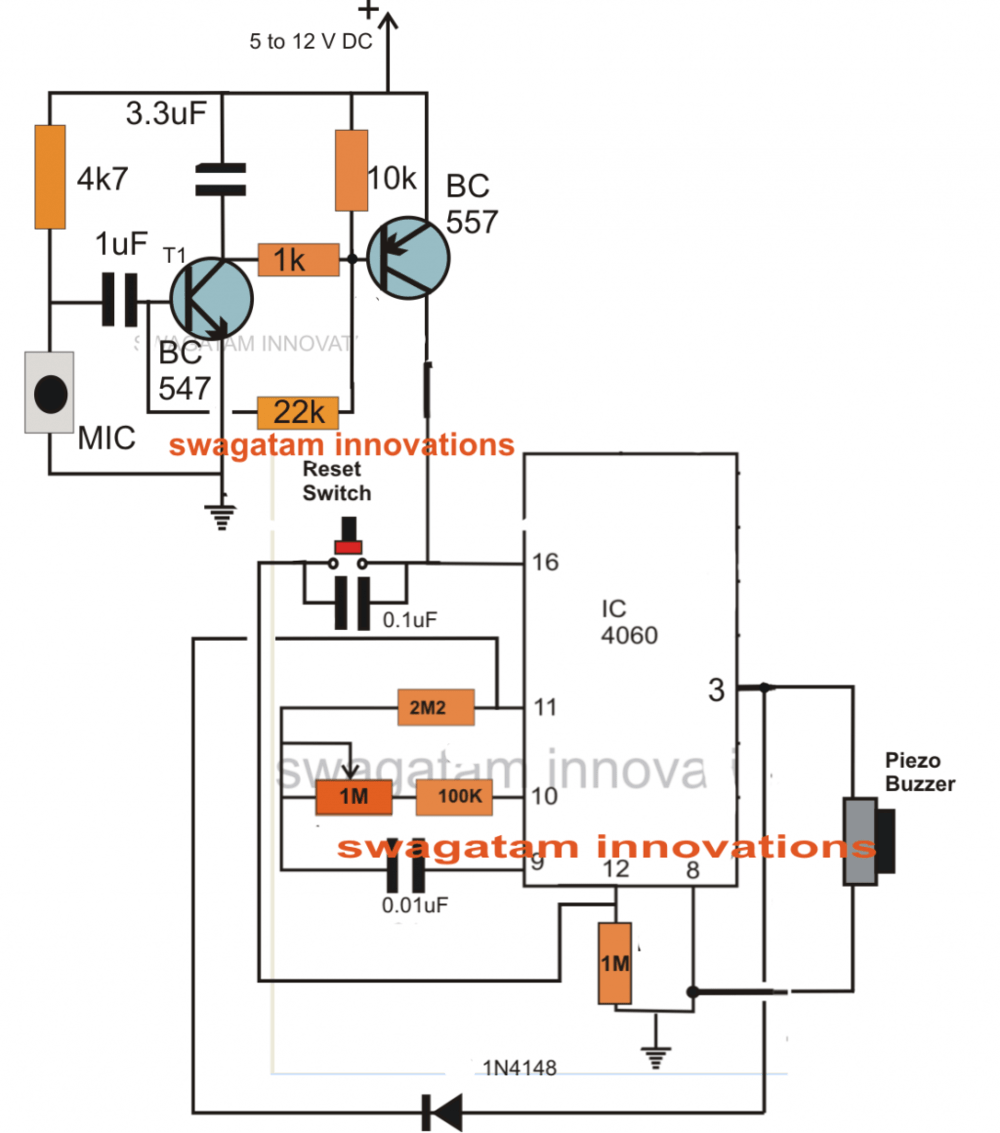
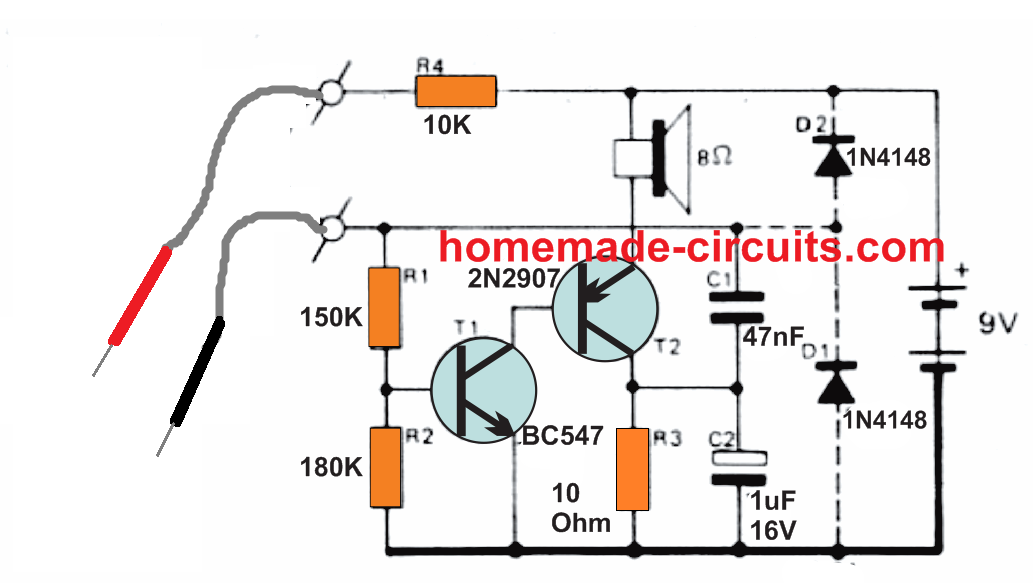
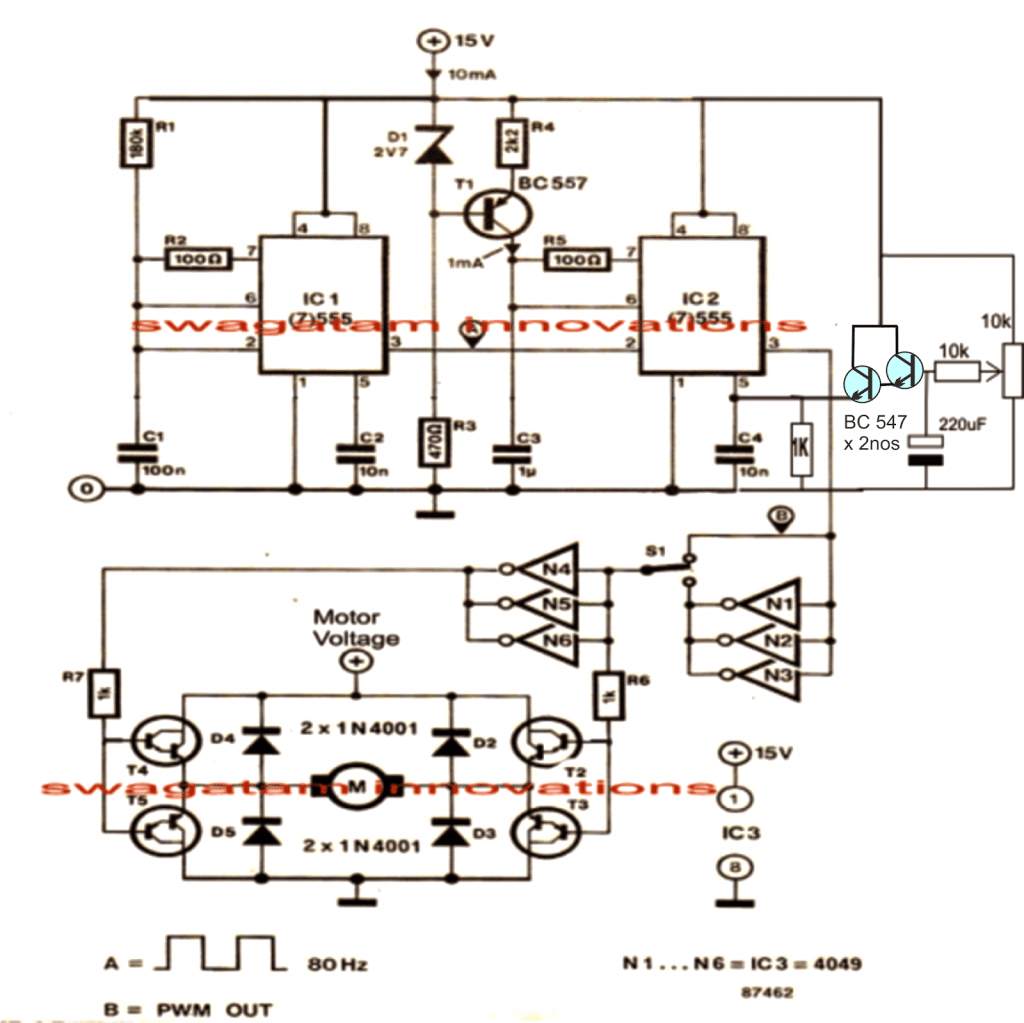
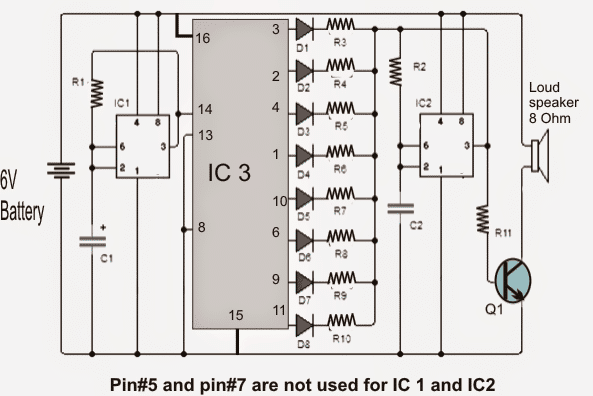
Mõned mootorid saavad kiiruse vähendamise impulss-alalisvoolu signaalilt töötades. See signaal on tavaliselt umbes sada Hz. Mootori kiirust saab muuta impulsi laiuse muutmisega, mitte impulsi sageduse muutmisega. Selliseid mootoreid võib leida elektroonika ülejääkidest ja neid saab hõlpsasti tuvastada sellega ühendatud impulssgeneraatori järgi. Mis tahes alalisvoolumootorit saab juhtida impulssallikaga, ja sellise skeemi skeem on lisatud.
Nagu näete, valiti ajami ostsillaatoriks taimer 555, mille sagedus on umbes 100 Hz. Takisti R1 ja kondensaator C stabiliseerivad ja eraldavad impulssigeneraatori mootori tekitatud naastudest. Kuna see seade saab toita 6–12 volti toiteallikast, võiksite parema tulemuse saamiseks muuta kondensaatori C4 ja C6 väärtust sõltuvalt sellest, millist pinget te kasutate. Impulssväljund võetakse IC1 kontaktist 3 ja suunatakse IC2 teise kontakti, ka taimer 555.
Teine taimer muudab impulsi laiust, reguleerides potentsiomeetri R5 ja takisti R6 kaudu kondensaatorisse C6 sisestatud pinget. Impulsi kestus määrab mootori kiiruse ja impulsi laiust saab reguleerida vahemikus 10% kuni 100%.
Transistor Q1 võtab vastu impulsi laiusega moduleeritud signaali läbi takisti R7. Kuna Q1 on nõrkvooluseade, edastab see signaali Q2-le, võimsustransistorile, mis suudab toime tulla mootori praeguste nõudmistega. Need transistorid ei ole kriitilised ja peaaegu igasugune nõrkvoolutransistor töötab. Relee määrab mootori suuna.
Sammumootorid
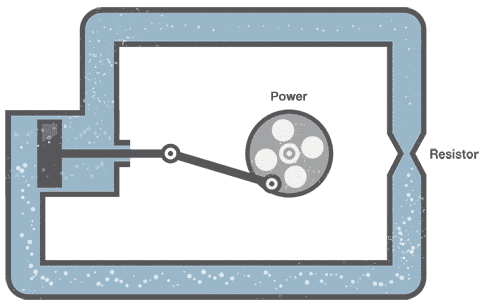
Kõigist mootoritest on kõige keerulisem samm-mootor. Nagu nimest järeldub, pöörleb mootor kraadi kaupa ja töötab impulsi abil. Täpne pöördeaste ühe sammu kohta võib tootjal või mudelil erineda, kuid 20 kraadi on populaarne ja toodab 18 sammu ühe täieliku pöörde jaoks. Stepper-mootoreid on kahte põhitüüpi: bipolaarne ja unipolaarne. Nagu samm-mootori skeemilt näha, on bipolaarne lihtsalt kahe rulliga töötav mootor.
Unpolaarne tüüp on kaks keskkraanaga mähist. Kui keskkraane eiratakse, võib unipolaarne mootor töötada bipolaarse tüübina. Kaks samm-mootori mähist toidetakse samm-impulsse vaheldumisi polaarselt mähisest poolini. Selle protsessi kaart on toodud töödiagrammil, et kujutada mootori tegevust graafiliselt. Erinevalt tavalistest alalisvoolumootoritest väheneb pöördemoment kiirusega. Sammmootori edasiliikumiseks on vaja ka eritüüpi ajamit ja see peaks olema mootoriga kaasas. Juhtplokki pole soovitatav ehitada, välja arvatud juhul, kui mootor on varustatud hea tehnilise lehega, millel on komponendisoovitused ja täielik skeem.
Mootoril võib olla vaja puhvreid, et see mootorisüsteemist eraldada, või see võib vajada eraldi toiteallikat. Sõltumata vajadustest võivad need mootoriti oluliselt erineda. Harrastuskauplused on kõige usaldusväärsemad samm-mootorite tarnijad ja kuigi elektroonikakauplustes võib neid aeg-ajalt olla, ei pruugi need sisaldada vajalikku teavet
Osalise pöördega mootorid
Mõned robotifunktsioonid nõuavad ainult osalist pööret, näiteks pea või käte liikumine. Lihtsaim viis nende saavutamiseks on asendipeatuste ja libisevate käikudega. Seda tüüpi mootorite mehaaniliste detailide illustreerimine on toodud ülal. Mikrolülitit saab kasutada peatusandurina, et lülitada toide välja ja lähtestada järgmise toimingu suund.
Alumine ratas on mootoriga ühendatud, samal ajal kui ülemine ratas on alumisest ratast eraldatud ümmarguse vilditükiga. Kui alumine ratas pöörab ülemist ratast koos sellega, kuni stoppnõel puutub mikrolülitiga kokku. Mõnes konstruktsioonis ei nähta ette mootori seiskamist, seega toimivad lihtsad vahetükkidega kruvid mootori seiskamisena.
Bio-Motor
Bio-metall on hämmastav aine, mis on eksisteerinud juba paar aastat ja sellel on robootika valdkonnas mitmeid rakendusi. Joonisel näeme, et bio-metalltraadi tükk kahaneb viis protsenti oma pikkusest, kui sellele rakendatakse vaid paar volti. Pärast aastaid kestnud katsetamist on biojuhe osutunud tugevaks, usaldusväärseks ja uute toodete ilmnemisel muutub see üha kasulikumaks. Selle mõnevõrra aeglasem reageerimisaeg muudab selle ideaalseks käte ja kätega robotirakenduste jaoks, kus jerkimine oleks problemaatiline. Pikk traaditükk võib robotkäe kogu pikkuses venitades tekitada märkimisväärse liikumise. Praegu on kommertsturul robotmetallist komplektid, mis kasutavad biometalli.
Bhaskar Singh
Turundusjuht
 Tööstusrobotid on seadmed, mis teatud määral dubleerivad inimese liikumist koos ohu vähendamisega, pakkudes rohkem jõudu, täpsust ja järjepidevust. Nad vajavad laias valikus mootoriga liikumisi, sõltuvalt nende töörežiimist, juhtimisest, kasutatavatest tööriistadest ja tehtavatest töödest. Tööstuslik robotmootor peaks konkreetse ülesande täitmiseks spetsialiseeruma tavapärastest mootoritest erinevate tööülesannete täitmiseks.
Tööstusrobotid on seadmed, mis teatud määral dubleerivad inimese liikumist koos ohu vähendamisega, pakkudes rohkem jõudu, täpsust ja järjepidevust. Nad vajavad laias valikus mootoriga liikumisi, sõltuvalt nende töörežiimist, juhtimisest, kasutatavatest tööriistadest ja tehtavatest töödest. Tööstuslik robotmootor peaks konkreetse ülesande täitmiseks spetsialiseeruma tavapärastest mootoritest erinevate tööülesannete täitmiseks.
Elektrimootoreid kasutatakse tööstuslikus robootikas kõige sagedamini tänu ülitõhusale energiaallikale ja suhteliselt lihtsale konstruktsioonile, mis muudab need kõigi aspektide - paigalduse, hoolduse ja hoolduse osas - populaarseimaks variandiks.
Sõltuvalt vajalikust tööst kasutatakse erinevaid mootoreid erinevatel eesmärkidel. Näiteks alalisvoolumootoreid kasutatakse liikumiseks päripäeva ja vastupäeva, näited kraanades ja tõstukites, impulssmootoreid kasutatakse impulssliikumiste tagamiseks alalisvoolu impulsi laiuse abil, osalisi pöörlemismootoreid kasutatakse pea ja käe sarnaste liikumiste tagamiseks ja kõige keerulisemaks - samm-mootoreid kasutatakse astmeliste pöörete tegemiseks astmeliselt.
Veelgi enam, sõltuvalt töö tüübist kasutatakse erineva otstarbega ja erineva suurusega mootoreid erinevatel eesmärkidel. Sõltuvalt tööst ja roboti disainist on mitut tüüpi mootoreid, millel on erinevates kohtades erinev rakendus.
Mohan Krishna. L
Müügi- ja tugijuht
Roboteid kasutatakse selle töö tegemiseks, mida inimesed saaksid teha, ja on palju põhjuseid, miks robotid on inimestest paremad. 
Neid on kahte peamist tüüpi robotit:
Mobiilne robot: See liikumine jalgadel või radadel.
Statsionaarne robot: Sellel on kindel alus.
Statsionaarseid roboteid saab tavaliselt kasutada robotirelvade abil esemete ülesvõtmiseks või mõne muu töö tegemiseks, mis hõlmab objektile jõudmist.
Robotkäel on kolm põhiosa: -
- Õlaliiges
- Randmeliiges
- Fikseeritud alus
Vajad robotit
- Võime töötada kiiresti ja ohtlik keskkond.
- Võime ülesandeid uuesti ja uuesti korrata.
- Oskus töötada täpselt.
- Erinevate ülesannete täitmise oskus.
- Tõhusus.
Mootor on seade, mis muudab elektrienergia mehaaniliseks energiaks, st elektromehaaniliseks seadmeks. On kahte tüüpi mootoreid, nagu vahelduvvoolumootor ja alalisvoolumootor
Tööstusrobotikas kasutatav mootor on servomootor. Servomootor on lihtne elektrimootor, mida juhitakse servomehhanismi abil. Kui juhitavat mootorit juhib vahelduvvoolu, nimetatakse seda vahelduvvoolu servomootoriks, muidu alalisvoolu servomootoriks. Enamik servomootoreid võivad pöörelda umbes 90–180 kraadi. Isegi mõned pöörlevad läbi täis 360 kraadi või rohkem. Mõned servomootori rakendused robootikas on
- Servomootori rakendus robotites, st Lihtne valida ja asetada robot, seda kasutatakse objekti valimiseks ühest positsioonist ja objekti paigutamisest erinevasse asendisse.
- Kasutatakse konveierite servomootorit
- tööstuses Üksuste valmistamine ja kokkupanek eseme edastamiseks ühest kogumisjaamast teise. Näiteks: - pudeli täitmise protsess.
- Servomootor robotsõidukis siin servomootor, mida kasutatakse ratastes. Kuna kasutatakse pideva pöörlemisega servomootorit.
Dinesh.P
Turundusjuht
 Tutvustatakse roboteid, et vähendada inimeste rasket tööd ja aidata inimestel edaspidiseks arenguks õnne luua. Termin robotid tähendab masinat, mis jäljendab inimese erinevaid omadusi. Robootika hõlmab teadmisi mehaanikast, elektroonikast, elektri- ja arvutiteadustest. Robotites kasutatavad mootorid on DC-mootorid, samm-mootorid ja servomootorid
Tutvustatakse roboteid, et vähendada inimeste rasket tööd ja aidata inimestel edaspidiseks arenguks õnne luua. Termin robotid tähendab masinat, mis jäljendab inimese erinevaid omadusi. Robootika hõlmab teadmisi mehaanikast, elektroonikast, elektri- ja arvutiteadustest. Robotites kasutatavad mootorid on DC-mootorid, samm-mootorid ja servomootorid
Kus
- Alalisvoolumootoreid kasutatakse pidevaks pöörlemiseks
- Stepper-mootoreid kasutatakse pöörlemiseks mõne kraadi juures
- Servomootoreid kasutatakse positsioneerimiseks, seda saab kasutada autodes ja lennukites
Ganesh .J
Turundusjuht 
Roboteid kasutatakse selleks, et teha tööd, mida inimesed saaksid teha, ning need vähendavad ka inimeste pingutusi ja aega ning parandavad kvaliteeti. Tööstusrobootikas kasutatavad mootorid on
- Vahelduvvoolumootorid
- Alalisvoolumootorid
- Servomootorid
- Sammumootorid.