Selles postituses uurime PIR või püroelektrilise infrapuna radiaalanduri HC-SR501 andmelehte. Saame aru, mis eesmärgil PIR-andurit kasutatakse? Selle põhilised päästikutoimingud, tihvtiühenduse üksikasjad, tehnilised näitajad ja lõpuks vaatame mõningaid reaalse elu rakendusi.
Alustuseks mõistame PIR-anduri tegelikku seadet, mis on selle sisse paigaldatud standardsed PIR-moodulid ja õppida selle sisemisi omadusi, kinnitusdetaile ja sisemisi töödetaile.

Mis on PIR-andur?
PIR tähistab püroelektrilist infrapunakiirguse andurit või passiivset infrapunaandurit. PIR on elektrooniline andur, mis tuvastab infrapunavalguse muutused teatud vahemaa tagant ja väljastab väljundis vastuseks tuvastatud IR-signaalile elektrisignaali. See suudab tuvastada kõiki infrapunakiirgust kiirgavaid objekte, näiteks inimesi või loomi, kui see on anduri ulatus või kaugeneb kaugusest või liigub sensori vahemikus.
PIR-anduri mooduli saab jagada kaheks osaks infrapunatundlikule kristallile ja töötlusahelale.
PIR-tundliku kristalli illustratsioon:

Metalli tume osa, kus on IR-tundlikud kristallid, suudab tundlik kristall tuvastada ümbritseva infrapuna taseme. Selles on tegelikult kaks püroelektrilist andurit liikuvate objektide tuvastamiseks. Kui üks tundlikest kristallidest tuvastab infrapuna muutuse (juurdekasv või vähenemine) kui teine tundlik kristall, käivitatakse väljund.
Selle tundliku kristalli kohale asetatakse tavaliselt kuplikujuline plastkonstruktsioon, mis toimib läätsena, et fokuseerida infrapunavalgus anduritele.
Kuidas PIR töötab
Püroelektrilise infrapunaanduri tuvastustoiming põhineb omadusel või omadusel, mis vastutab selle materjali polarisatsiooni muutmise eest vastusena temperatuurimuutustele.
Neil anduritel on IR-signaalide tuvastamiseks kahes etapis kaks või paar sensori elementi, mis tagab lollikindla tuvastamise, tühistades soovimatud temperatuurimuutused olemasolevas EMI-etapis. See kaheastmeline tajumisprotsess parandab anduri üldist stabiilsust ja aitab tuvastada ainult inimese juuresolekul saadud IR-signaale.
Kui inimene või asjakohane infrapunaallikas liigub PIR-andurist mööda, lõikub kiirgus vaheldumisi andurielementide paari, käivitades väljundi nii, et see tekitaks paari sisse / välja või kõrgeid ja madalaid impulsse, nagu on kujutatud joonisel. järgmine lainekuju:

Järgmine töötlemata Gif-simulatsioon näitab, kuidas PIR-andur reageerib liikuvale inimesele ja arendab väljundjuhtmete kaudu paar lühikest teravat impulssi nõutava töötlemise või asjakohaselt konfigureeritud releeetapi käivitamiseks

PIR-i sisemine paigutus
Järgmine joonis näitab standardse PIR-anduri sisemist paigutust või konfiguratsiooni.

Vasakul näeme paari IR-sensorit, mis on järjestikku ühendatud. Selle seeria ülemine ots on ühendatud sisseehitatud FET-i väravaga, mis toimib väikese IR-signaali võimendina. Rg allatakistus annab FET-ile vajaliku ooterežiimi nullloogika, tagamaks, et see jääb IR-signaali puudumisel täielikult välja.
Kui andurielementide paar tuvastab liikuva IR-signaali, genereerib see vastava paari hi ja madala loogika signaale, nagu eespool arutletud:
FET võimendab neid impulsse sobivalt ja kopeerib selle väljundtapis edasiseks töötlemiseks lisatud vooluringi abil.
Seotud EMI etapid koos kondensaatoriga pakuvad protsessile täiendavat filtreerimist, et tekitada PIR-i näidatud väljundtapis puhas impulsside komplekt.
PIR-anduri seadistamise testimine
Järgmine pilt näitab PIR-anduri standardset seadistamist. PIR-i väljund- ja Vss-tihvtid (negatiivne tihvt) on ühendatud välise allatõmbetakistiga, Vdd-tihvt tarnitakse 5 V toiteallikaga.

Kirjatarvete must korpus tekitab hakkuri abil PIR-anduri jaoks nõutava ekvivalentse infrapunakiirguse. Hakkimisplaat lõikab vaheldumisi IR signaale, imiteerides liikuvat IR sihtmärki.
See tükeldatud IR-signaal tabab PIR-andurit, genereerides kogu väljundpoldil kindlaksmääratud impulsid, mida amplifitseeritakse sobivalt opampi abil, et seda analüüsida.
Ülaltoodud seadistuste ideaalseid katsetingimusi saab näha allpool:

Sensorelemendi väljundi tasakaalustamine
Kuna PIR-ides kasutatakse kahesugust tuvastamise mehhanismi, on vaja tagada, et töötlemine läbi läätsepaari oleks õigesti tasakaalustatud.
Sensorelemente testitakse ja asjakohaselt konfigureeritakse, hinnates vastavat ühe signaali väljundpinget (SSOV) järgmise valemi abil:
Kaalud: | Va - Vb | / (Va + Vb) x 100%
Kus Va = külje A tundlikkus (mV piigist tippuni)
Vb = tundlikkuse pool B (mV piigist tippuni)
Peamised spetsifikatsioonid
PIR-anduri peamised tehnilised näitajad ja mõõtmete parameetrid saab teada järgmistest üksikasjadest:

PIR-sisemoodulite kasutamine
Täna leiate PIR-moodulid, millel on spetsiaalse töötlusahelaga ja objektiiviga integreeritud PIR-andur. See suurendab PIR-i voldikute jõudlust ja võimaldab lõpptarbijal saada moodulist täpselt määratletud optimeeritud, võimendatud väljundit.
See väljund tuleb nüüd konfigureerida ainult relee astmega koormuse vajalikuks sisse / välja lülitamiseks vastusena inimese kohalolekule kogu ettenähtud tsoonis.
Standardmoodulite sees olev vooluahel koosneb IC BISS0001-st, mis on spetsiaalselt loodud liikumistuvastusrakenduste jaoks. Pakutakse kahte nuppu, üks mooduli tundlikkuse reguleerimiseks ja teine nupp aja pikkuse reguleerimiseks, kui kaua väljund peaks olema kõrge pärast mooduli käivitamist.

Uurime nüüd PIR-anduri HC-SR501 tehnilisi üksikasju.
Tööpinge:
HC-SR501 on vahemikus 5 V kuni 20 V, mis teeb vooluahela kujundajatele suurt paindlikkust.
Praegune kasutus:
HC-SR501 on akusõbralik seade, mille voolutarve on 65 mA, kui see tuvastab IR-valguse muutuse.
Väljundpinge:
Kui moodul tuvastab infrapuna liikumise, läheb väljund 3,3 V kõrgeks, kui moodul ei tuvasta liikumist, siis pärast fikseeritud ajavahemikku LOW või 0 V.
Hilinemisaeg:
Nupu abil saab reguleerida väljundi kõrgeks jäämise aega pärast IR tuvastamist. See on ajavahemik, mida saab reguleerida 5 sekundist 5 minutini.
Tundlikkuse vahemik:
Tuvastusala nurk on umbes 110 kraadi koonus. Tundlikkuse reguleerimiseks antakse nupp, mille võime varieerida 3 meetrist kuni 7 meetrini risti senoriga. Tundlikkus väheneb, kui liigume sensori mõlemat külge.
Töötemperatuur:
HC-SR501 on muljetavaldava töötemperatuuriga vahemikus -15 kuni +70 kraadi Celsiuse järgi.
Vaikne vool:
Vaikevool on toiteallikast tarbitav vool, kui andur ei tuvasta liikumist või on jõude. See tarbib vähem kui 50 uA, mis muudab anduri aku sõbralikuks.

PIR-i kinnitused ja päästikurežiimid
Käivitusrežiimid:
PIR-moodulil on kaks päästikurežiimi: ühekordne päästik / kordumatu režiim ja korduv päästik. Neile kahele režiimile pääseb juurde, muutes moodulis antud hüppaja asendit.
Ühe käivitusrežiimi / kordumatu režiim:
Kui PIR-andur on seatud ühe päästiku režiimi (ja taimeri nupp / viivitusaeg on seatud 5 sekundiks (ütleme)), pöördub inimese tuvastamisel väljund 5 sekundiks HIGH ja LOW.
Korrake päästiku režiimi:
Kui PIR-andur on seatud korduva päästiku režiimi, pöördub inimese tuvastamisel väljund HIGH-ni, loendatakse taimer 5 sekundit, kuid kui selle 5 sekundi jooksul tuvastatakse teine inimene, lähtestatakse taimer nulli ja loendatakse veel 5 sekundit pärast teist inimene avastatakse.
Blokeerimise aeg:
Blokeerimisaeg on ajaintervall, kus andur on keelatud või ei tuvasta liikumist. HC- blokeerimise aeg
SR501 on vaikimisi 3 sekundit.
See juhtub pärast viivitusaega (mis määrati taimeri nupuga) väljund läheb selle ajavahemiku jooksul 3 sekundiks LOW (Madal), liikumist ei tuvastata. Pärast 3 sekundit (LOW) on andur valmis uuesti liikumist tuvastama.
Teisisõnu, kui andur tuvastab liikumise, väljund väljub HIGH, siis jääb väljund HIGH nagu taimeri nupu järgi (näiteks 5 sekundit), 5 sekundi pärast läheb PIR andur LOW, LOW signaal jääb 3 sekundiks sõltumata uuest liikumine, kui seda on.
Mooduli mõõtmed:
Andur on piisavalt kompaktne, et peita inimeste pilgu eest, et see ei mõjutaks dekoratiive jne. Selle mõõtmed on 32 mm x 24 mm.
Objektiivi suurus:
Valget kuppelstruktuuri, mis ümbritseb püroelektrilist andurit, nimetatakse Fresneli läätsedeks, mis suurendavad tuvastamise ulatust ja näeb välja läbipaistmatu. Selle läbimõõt on 23 mm.
Rakendused:
• Turvasüsteemid.
• Automaatsed tuled.
• Tööstuslik automaatjuhtimine.
• Automaatsed uksed.
Mõned saidid leiavad PIR-andurit kasutavaid projekte.
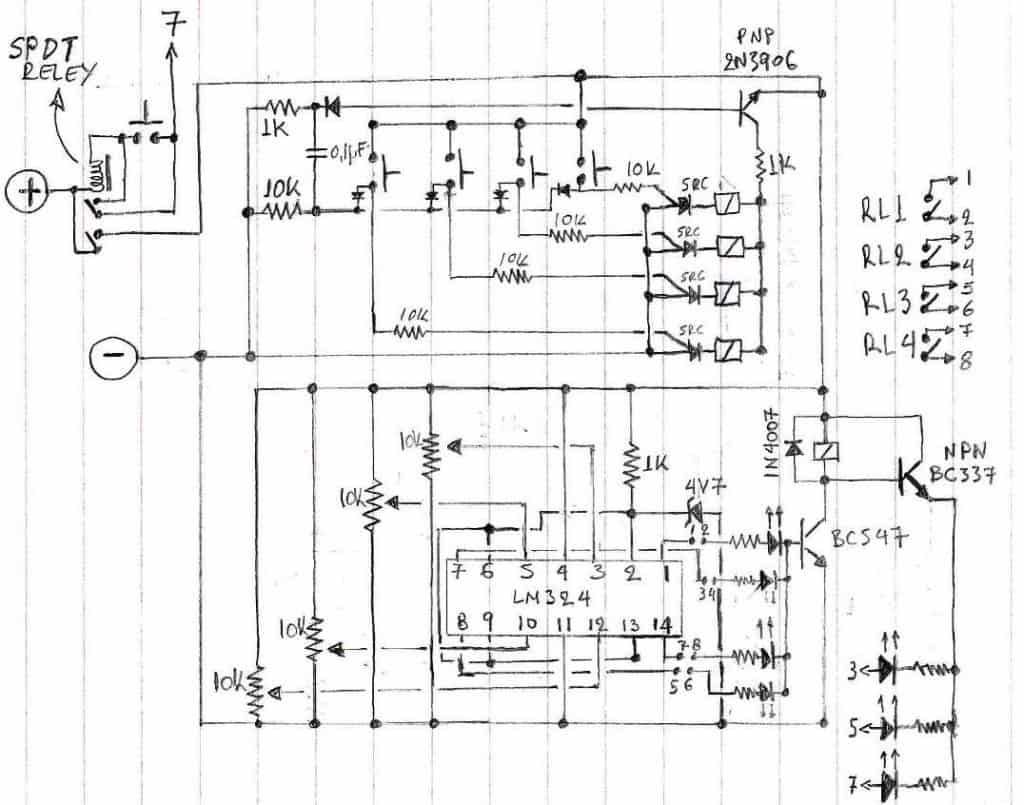
Tüüpiline PIR-mooduli vooluring
Harrastajatele, kes kavatsevad ehitada täieliku PIR-mooduli koos anduri ja täieõigusliku võimendiga, saab kasutada järgmist standardset skeemi ja seda saab kasutada kõigi asjakohaste PIR-anduritel põhinevate rakenduste käivitamiseks.

Kas teil on veel kahtlusi või küsimusi? Pange need julgelt allpool toodud kommentaarikasti kaudu üles
Paari: Arduino täissilla (H-silla) inverterahel Järgmine: Sõiduki kiiruse detektori vooluring politsei jaoks