Flyback-konfiguratsioon on eelistatud topoloogia SMPS-i rakenduste kujundustes peamiselt seetõttu, et see tagab väljund-alalisvoolu täieliku isoleerimise sisendvõrgust. Muud funktsioonid hõlmavad madalaid tootmiskulusid, lihtsamat disaini ja lihtsat teostust. Madala vooluga DCM-muunduriga muundurite muundurid, mis sisaldavad väljundspetsifikatsiooni alla 50 vatti, on laialdasemalt kasutatavad kui suuremad kõrgvoolu analoogid.
Õpime üksikasjad põhjaliku selgitusega järgmistest lõikudest:
Põhjalik väljatöötatud juhis võrguühenduseta fikseeritud sagedusega DCM Flyback Converterile
Lennurežiimid: DCM ja CCM
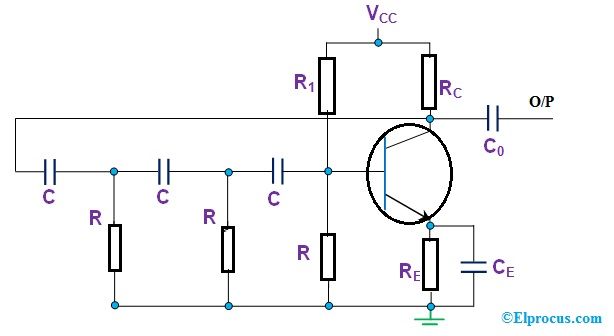
Allpool näeme flyback-muunduri põhilist skemaatilist kujundust. Selle konstruktsiooni peamised sektsioonid on trafo, lülitusvõimsusega mosfet Q1 primaarsel küljel, silla alaldi sekundaarsel küljel D1, filtri kondensaator silumiseks väljund D1-st ja PWM-kontrolleri etapp, mis võib olla IC-ga juhitav vooluahel.

Seda tüüpi tagasipöördekonstruktsioonil võib olla töö CCOS (pidevjuhtimisrežiim) või DCM (pideva juhtivuse režiim), lähtudes sellest, kuidas toide MOSFET T1 on konfigureeritud.
Põhimõtteliselt laseb DCM-režiimis kogu trafos salvestatud elektrienergia üle sekundaarse külje üle iga kord, kui MOSFET lülitatakse selle lülitamistsüklite ajal välja (nimetatakse ka tagasipöördeperioodiks), mis viib primaarse külgvoolu nullpotentsiaalini enne kui T1 saab oma järgmise lülitustsükli jooksul uuesti sisse lülitada.
CCM-režiimis ei saa primaarseks salvestatud elektrienergia võimalust sekundaarselt täielikult üle kanduda ega indutseeruda.
Seda seetõttu, et kõik järgnevad PWM-regulaatori lülitusimpulsid lülitavad T1 sisse enne, kui trafo on kogu oma salvestatud energia koormusele kandnud. See tähendab, et tagasilöögivool (ILPK ja ISEC) ei tohi kunagi iga lülitustsükli jooksul nullpotentsiaali saavutada.
Võime tunnistada kahe töörežiimi erinevust järgmisel diagrammil läbi trafo primaarse ja sekundaarse sektsiooni praeguste lainekuju mustrite.

Nii DCM-i kui ka CCM-i režiimidel on oma spetsiifilised eelised, mida võib õppida järgmisest tabelist:

Võrreldes CCM-iga nõuab DCM-režiimi lülitus suuremat tippvoolu taset, et tagada optimaalne võimsus trafo sekundaarsel küljel. See omakorda eeldab, et primaarset külge hinnatakse suurema RMS-vooluga, mis tähendab, et MOSFET-i tuleb hinnata täpsemalt kõrgemale vahemikule.
Juhtudel, kui konstruktsioon tuleb ehitada piiratud valiku sisendvoolu ja komponentidega, valitakse tavaliselt CCM-režiimi fyback, mis võimaldab disainil kasutada suhteliselt väiksemat filtrikondensaatorit ja madalamat juhtivuskadu MOSFET-is ja trafos).
CCM muutub soodsaks tingimustes, kus sisendpinge on madalam, samas kui vool on suurem (üle 6 amprit), disainilahendused, millega võib töötada üle 50 vatti võimsus , välja arvatud väljundid 5 V juures, kus võimsuse spetsifikatsioon võib olla väiksem kui 50 vatti.

Ülaltoodud pilt näitab praegust reaktsiooni tagasilennurežiimide primaarsel küljel ja vastavat suhet nende kolmnurkse ja trapetsikujulise lainekuju vahel.
Kolmnurkse lainekuju IA näitab minimaalset initsialiseerimispunkti, mida võib pidada nulliks MOSFET-i sisselülitusperioodi alguses, ja ka voolu kõrgemat taset, mis püsib primaarmähises trafo ajal, kuni MOSFET uuesti sisse lülitatakse, CCM-i töörežiimi ajal.
IB võib pidada praeguse suuruse lõpp-punktiks, samas kui mosfet lüliti on sisse lülitatud (Ton intervall).
Normaliseeritud voolu väärtust IRMS-i võib vaadelda kui K-teguri (IA / IB) funktsiooni Y-telje kohal.
Seda võib kasutada kordajana alati, kui tuleb arvutada takistuskaod mitmesuguste lainekujude arvule trapetsikujulise lainekuju korral, millel on lame ülemine lainekuju.
See näitab ka trafo mähise ja transistoride või dioodide vältimatuid alalisvoolu juhtivuskaod voolu lainekuju funktsioonina. Neid nõuandeid kasutades suudab disainer sellise hästi arvutatud muunduri konstruktsiooniga ära hoida 10–15% juhtivuskaod.
Ülaltoodud kriteeriumide arvestamine võib osutuda märkimisväärseks ülioluliseks rakenduste jaoks, mis on ette nähtud suure RMS-voolu haldamiseks, ja nõuda põhifunktsioonidena optimaalset efektiivsust.
Võib olla võimalik kõrvaldada täiendavad vaskkaod, ehkki see võib vajada suurt südamiku suurus hädavajaliku suurema mähisega aknaala mahutamiseks, erinevalt olukordadest, kus oluliseks saavad ainult põhilised spetsifikatsioonid.
Nagu oleme seni aru saanud, võimaldab DCM-i töörežiim kasutada väiksemat trafot, omab suuremat mööduvat reageerimist ja töötab minimaalsete lülituskadudega.
Seetõttu on see režiim ülimalt soovitatav tagasilülitusahelate jaoks, mis on ette nähtud kõrgema väljundpinge jaoks ja suhteliselt madalama amprivajadusega.
Kuigi võib olla võimalik disainida tagasilöögimuundurit nii DCM-i kui ka CCM-režiimidega töötamiseks, tuleb meeles pidada ühte asja, et üleminekul DCM-režiimist CCM-režiimiks muundub see nihutusfunktsioon 2-pooluseks, mis põhjustab muunduri impedants.
See olukord muudab hädavajalikuks täiendavate disainistrateegiate kaasamise, sealhulgas mitmesuguse silmuse (tagasiside) ja kalde kompenseerimise sisemise voolu silmusüsteemi suhtes. Praktiliselt tähendab see seda, et peame veenduma, et muundur on mõeldud peamiselt CCM-režiimi jaoks, kuid on võimeline töötama DCM-režiimiga, kui väljundis kasutatakse kergemaid koormusi.
Võib olla huvitav teada, et täiustatud trafomudelite abil võib osutuda võimalikuks CCM-muunduri täiustamine puhtama ja kergema koormuse reguleerimise kaudu, samuti astmelise trafo kaudu kõrge ristreguleerimine laias koormusvahemikus.
Sellistel juhtudel täidetakse väike südamiku vahe välise elemendi, näiteks isolatsioonilindi või paberi sisestamisega, et tekitada algselt kõrge induktiivsus ja võimaldada ka CCM-i töötamist kergemate koormustega. Arutame seda üksikasjalikult teinekord mu järgnevate artiklite üle.
Selliste mitmekülgsete DCM-režiimi omadustega ei ole üllatav, et see muutub populaarseks valikuks alati, kui on vaja välja töötada probleemivaba, tõhus ja madala energiatarbega SMPS.
Järgnevalt õpime samm-sammult juhiseid DCM-režiimi flyback-muunduri kujundamiseks.
DCM Flybacki disainivõrrandid ja järjestikused otsustusnõuded
Samm 1:
Hinnake ja hinnake oma disaininõudeid. Kõik SMPS disain peab alustama süsteemi spetsifikatsioonide hindamisest ja määramisest. Peate määratlema ja määrama järgmised parameetrid:

Me teame, et tõhususe parameeter on ülioluline, mis tuleb kõigepealt otsustada, lihtsaim viis on minna eesmärgi seadmiseks umbes 75–80%, isegi kui teie disain on odava disainiga. Lülitussagedus tähistatud kui
Fsw-i tuleb üldiselt kompromiteerida, kasutades samal ajal parimat trafo suurust ja lülitamise ning EMI tõttu tekkivaid kahjusid. Mis tähendab, et võib-olla tuleb otsustada vähemalt 150 kHz lülitussageduse üle. Tavaliselt võib selle valida vahemikus 50kHz kuni 100kHz.
Lisaks sellele, kui projekteerimisel on vaja lisada rohkem kui üks väljund, tuleb maksimaalset võimsusväärtust Pout reguleerida kahe väljundi ühisväärtusena.
Võib olla huvitav teada, et kuni viimase ajani olid kõige populaarsemad tavalised SMPS-i kujundused mosfeti ja PWM-i lülitusregulaator kahe erineva eraldiseisva etapina, integreerituna üle PCB paigutuse, kuid tänapäeval võib tänapäevastes SMPS-üksustes need kaks etappi leida ühe pakendi sisseehitatud ja toodetud üksikute IC-dena.
Peamiselt on parameetrid, mida tavaliselt kasutatakse tagasilennu SMPS-muunduri kavandamisel: 1) rakendus või koormuse spetsifikatsioonid, 2) maksumus 3) ooterežiimi võimsus ja 4) täiendavad kaitsefunktsioonid.
Sisseehitatud IC-de kasutamisel muutuvad asjad palju lihtsamaks, kuna optimaalse tagasilöögimuunduri kujundamiseks on vaja arvutada ainult trafo ja mõned välised passiivsed komponendid.
Lähme üksikasjadesse, mis käsitlevad tagasihoidliku SMPS-i kujundamise kaasatud arvutusi.
Sisendkondensaatori Cin ja sisendi alalispinge vahemiku arvutamine
Sõltuvalt sisendpinge ja võimsuse spetsifikatsioonidest saab Cini valimise standardreegli, mida nimetatakse ka alalisvoolu kondensaatoriks, õppida järgmistest selgitustest:

Laia tööpiirkonna tagamiseks võib alalisvooluühenduse kondensaatorile valida 2uF vati või suurema väärtuse kohta, mis võimaldab teil selle komponendi jaoks head kvaliteedivahemikku.
Järgmisena võib nõuda minimaalse alalisvoolu sisendpinge kindlaksmääramist, mille võib saada lahendades:

Kui tühjenemisest saab alalisvoolu kondensaatori töösuhe, mis võib olla umbes 0,2

Ülaltoodud joonisel võime visualiseerida alalisvoolu kondensaatori pinge. Nagu näidatud, tekib sisendpinge maksimaalse väljundvõimsuse ja minimaalse sisendvoolu pinge ajal, samas kui maksimaalne alalisvoolu sisendpinge tekib minimaalse sisendvõimsuse (koormuse puudumine) ja maksimaalse sisendvoolu pinge ajal.
Koormuseta seisundi korral näeme maksimaalset alalisvoolu sisendpinge, mille jooksul kondensaator laadib vahelduvvoolu sisendpinge tipptasemel ja neid väärtusi saab väljendada järgmise võrrandiga:

3. samm:
Flybacki indutseeritud pinge VR ja MOSFET VDS maksimaalse pingepinge hindamine. Flybacki indutseeritud pinget VR võib mõista kui trafo esmasel küljel indutseeritud pinget, kui mosfet Q1 on välja lülitatud.
Ülaltoodud funktsioon mõjutab omakorda mosfeti maksimaalset VDS-reitingut, mida saab kinnitada ja tuvastada järgmise võrrandi lahendamisega:

Kus on Vspike trafo lekke induktiivsuse tõttu tekitatud pinge piik.
Alustuseks võib võtta 30% Vspmaxi VDSmax-st.
Järgmine loend ütleb meile, kui palju peegeldunud pinget või indutseeritud pinget võib soovitada 650 V kuni 800 V nimipinge jaoks ja mille esialgne piirväärtus VR on eeldatava suure sisendpinge vahemiku korral alla 100 V.

Õige VR-i valimine võib olla soodne pinge sekundaarse alaldi pingetaseme ja primaarse külje mosfeti spetsifikatsioonide vahel.
Kui VR on valitud kõrgendatud pöördenurga kaudu väga kõrgeks, tekitaks see suurema VDSmax, kuid madalama pingepinge sekundaarsel külgdioodil.
Ja kui VR valitakse väiksema pöörde suhte kaudu liiga väikeseks, põhjustaks see VDSmax küll väiksema väärtuse, kuid tooks kaasa sekundaarse dioodi pingetaseme tõusu.
Suurem primaarne külg VDSmax tagab mitte ainult madalama sekundaarse külgdioodi pingetaseme ja primaarvoolu vähenemise, vaid võimaldab rakendada ka kulutõhusat disaini.
Tagasilöök DCM-režiimiga
Kuidas arvutada Dmax sõltuvalt Vreflected ja Vinmin
Maksimaalset töötsüklit võib oodata VDCmin-i juhtumite korral. Selles olukorras võime trafo kujundada DCM ja CCM künniste järgi. Sel juhul võib töötsükli esitada järgmiselt:

4. samm:
Kuidas arvutada esmane induktiivvool
Selles etapis arvutame esmase induktiivsuse ja esmase tippvoolu.
Esmase tippvoolu kindlakstegemiseks võiks kasutada järgmisi valemeid:

Kui ülaltoodud on saavutatud, võime edasi minna ja arvutada esmase induktiivsuse järgmise valemi abil maksimaalse töötsükli piires.

Tagasilöögi osas tuleb olla ettevaatlik, see ei tohi minna CCM-režiimi mis tahes vormis ülemääraste koormustingimuste tõttu, ja selle maksimaalse võimsuse spetsifikatsiooni jaoks tuleks võrrandis # 5 Poutmaxi arvutamisel arvestada. Mainitud tingimus võib ilmneda ka juhul, kui induktiivsus suureneb üle Lprimaxi väärtuse, nii et võtke need teadmiseks.
5. samm :
Kuidas valida optimaalset südamiku klassi ja suurust:
Õige põhispetsifikatsiooni ja -struktuuri valimisel võib see tunduda üsna hirmutav, kui kavandate tagasilendu esimest korda. Kuna see võib hõlmata märkimisväärset hulka tegureid ja muutujaid, mida tuleb arvestada. Mõned neist võivad olla üliolulised: südamiku geomeetria (nt EE südamik / RM südamik / PQ südamik jne), südamiku mõõde (nt EE19, RM8 PQ20 jne) ja südamiku materjal (nt. 3C96. TP4, 3F3 jne).
Kui te pole abiks ülaltoodud spetsifikatsioonide osas, siis võiks tõhusaks probleemiks selle probleemi lahendamiseks olla a standardne tuumvaliku juhend põhitootja poolt või võite kasutada ka järgmist tabelit, mis annab teile ligikaudu südamiku standardsed mõõtmed, kui kavandate 65 kHz DCM tagasilööki, viidates väljundvõimsusele.

Kui olete südamiku suuruse valimisega valmis, on aeg valida õige pool, mille võiks hankida põhituumalehe järgi. Pooli täiendavaid omadusi, näiteks tihvtide arv, trükkplaadi kinnitus või SMD, horisontaalne või vertikaalne positsioneerimine, võib neid kõiki pidada eelistatavaks kujunduseks
Südamismaterjal on samuti ülioluline ja see tuleb valida sageduse, magnetvoo tiheduse ja südamiku kadude põhjal.
Alustuseks võite proovida variante nimega 3F3, 3C96 või TP4A. Pidage meeles, et olemasolevate põhimaterjalide nimed võivad identsete tüüpide jaoks olla erinevad, sõltuvalt konkreetsest tootmisest.
Kuidas arvutada minimaalseid esmaseid pöördeid või mähiseid

Kus termin Bmax tähistab maksimaalset töövoo tihedust, Lpri räägib teile primaarsest induktiivsusest, Ipri saab peamiseks tippvooluks, samal ajal kui Ae tuvastab valitud südamiku tüübi ristlõikepinna.
Tuleb meeles pidada, et Bmax ei tohiks kunagi lubada ületada küllastusvoo tihedust (Bsat), nagu on täpsustatud südamiku materjali andmelehel. Ferriitsüdamike Bsatist võib leida väikeseid erinevusi, sõltuvalt sellistest spetsifikatsioonidest nagu materjali tüüp ja temperatuur, kuid enamikul neist on väärtus lähedal 400mT.
Kui te ei leia üksikasjalikke võrdlusandmeid, võite kasutada Bmax 300mT. Kuigi suurema Bmax valimine võib aidata vähendada primaarsete pöörete arvu ja madalamat juhtivust, võib südamiku kadu märkimisväärselt suureneda. Proovige optimeerida nende parameetrite väärtuste vahel, nii et südamiku kadu ja vaskkaod hoitakse vastuvõetavates piirides.
6. samm:
Kuidas arvutada peamise teisese väljundi (Ns) ja mitmesuguste abiväljundite (Naux) pöörete arv
Selleks, et määrata sekundaarsed pöörded kõigepealt peame leidma pöörde suhte (n), mida saab arvutada järgmise valemi abil:

Kui Np on primaarsed pöörded ja Ns on sekundaarne pöörete arv, tähistab Vout väljundpinget ja VD ütleb meile sekundaarse dioodi pingelanguse kohta.
Soovitud Vcc väärtuse abiväljundite pöörete arvutamiseks võib kasutada järgmist valemit:

Abimähis muutub ülioluliseks kõigis tagasilöögimuundurites, et varustada juhtimissüsteemi algse käivitusvaruga. Seda toiteallikat VCC kasutatakse tavaliselt lülitus-IC toitmiseks esmasel küljel ja selle võiks fikseerida vastavalt IC-i andmelehel toodud väärtusele. Kui arvutus annab väärtuse, mis pole täisarv, ümardage see lihtsalt, kasutades selle täisarvu ülemist täisarvu ülemist väärtust.
Kuidas arvutada valitud väljundmähise traadi suurus
Mitme mähise juhtmete suuruste õigeks arvutamiseks peame kõigepealt välja selgitama RMS-i voolu spetsifikatsiooni üksiku mähise jaoks.
Seda saab teha järgmiste valemitega:


Alustuseks võiks traadi gabariidi määramiseks kasutada voolutihedust 150–400 ringmilperit ampri kohta. Järgmises tabelis on toodud viide sobiva traadimõõturi valimiseks 200M / A abil vastavalt RMS praegusele väärtusele. See näitab ka traadi läbimõõtu ja superemailitud vasktraatide sorteeritud gabariidi põhiisolatsiooni.

8. samm:
Arvestades trafo ehitust ja mähise konstruktsiooni iteratsiooni
Pärast ülaltoodud trafo parameetrite määramise lõpetamist on ülitähtis hinnata traadi mõõtmete ja pöörete arvu sobitamist trafo arvutatud südamiku suuruses ja määratud poolis. Selle optimaalse õiguse saavutamiseks võib südamiku spetsifikatsiooni optimeerimiseks juhtme gabariidi ja pöörete arvu järgi olla vajalik mitu kordamist või katsetamist.
Järgmine joonis näitab antud mähise ala EE tuum . Viidates traadi arvutatud paksusele ja üksikute mähiste pöörete arvule, võib olla võimalik ligikaudselt hinnata, kas mähis sobib olemasoleva mähise pindalaga (w ja h) või mitte. Kui mähis ei mahu, võib üks parameetritest pöörete arvu, traadi gabariidi või südamiku suuruse või mitme parameetri vahel vajada täpsustamist, kuni mähis sobib optimaalselt.

Mähise paigutus on ülioluline, kuna sellest sõltub oluliselt töö tulemuslikkus ja trafo töökindlus. Induktsiooni lekke piiramiseks on soovitatav kasutada mähise jaoks võileibu paigutust või struktuuri, nagu on näidatud joonisel 5.
Rahvusvaheliste ohutusnõuete täitmiseks ja nende järgimiseks peab konstruktsioonil olema mähise esmase ja sekundaarse kihi piisav isolatsioonivahemik. Seda saab tagada veerise abil keritud struktuuri abil või kolmekordse isoleeritud juhtmega sekundaartraadi abil, nagu on näidatud järgmisel vastaval joonisel

Kolmekordse isoleeritud traadi kasutamine sekundaarmähise jaoks muutub lihtsamaks võimaluseks rahvusvaheliste ohutusalaste seaduste kiireks kinnitamiseks, mis käsitlevad tagasilöögiga SMPS-konstruktsioone. Sellistel tugevdatud juhtmetel võib siiski olla veidi suurem paksus võrreldes tavalise variandiga, mis sunnib mähist rohkem ruumi hõivama, ja need võivad vajada täiendavaid jõupingutusi valitud pooli mahutamiseks.
9. samm
Kuidas kujundada esmane klamberringlus
Lülitusjärjestuses toimub mosfeti väljalülitusperioodide vältel kogu mosfeti äravoolu / allika kaudu kõrgepinge nael lekkeinduktsioonina, mis võib põhjustada laviini lagunemise, kahjustades lõpuks mosfetti.
Selle vastu võitlemiseks on primaarmähises tavaliselt konfigureeritud kinnitusahel, mis piirab tekitatud piigi koheselt mõne kindla madalama väärtusega.
Leiate paar kinnitusahela kujundust, mida võib selleks kasutada, nagu on näidatud järgmisel joonisel.

Need on nimelt RCD-klamber ja Dioodi / Zeneri klamber, kus viimast on palju lihtsam seadistada ja rakendada kui esimest võimalust. Selles klambrilülituses kasutame hüppeliigese kinnitamiseks alaldi dioodi ja kõrgepinge Zeneri dioodi, näiteks TVS (siirdepinge summutaja) kombinatsiooni.
Funktsioon Zeneri diood on efektiivselt klammerdada või piirata pinge piiki, kuni lekkepinge on täielikult manööverdatud läbi Zeneri dioodi. Dioodi Zeneri klambri eeliseks on see, et vooluahel aktiveerub ja klammerdub ainult siis, kui VR ja Vspike ühine väärtus ületab Zeneri dioodi lagunemisspetsiifikat ja vastupidi, kui piik jääb alla Zeneri jaotuse või ohutule tasemele, klamber ei pruugi üldse käivituda, lubamata tarbetut vooluhulka.
Kuidas valida kinnitusdioodi / Zeneri hinnang
See peaks alati olema peegeldunud pinge VR kahekordne väärtus või eeldatav spike pinge.
Alaldidiood peaks olema ülikiire taastumine või schottky tüüpi diood, mille nimiväärtus on suurem kui alalisvooluühenduse maksimaalne pinge.
RCD-tüüpi klambri alternatiivse variandi puuduseks on MOSFET-i dv / dt aeglustamine. Siin muutub takisti takistuse parameeter ülioluliseks, piirates samal ajal pinge piiki. Kui valitakse madala väärtusega Rclamp, parandaks see piikide kaitset, kuid võib suurendada hajumist ja energia raiskamist. Ja vastupidi, kui valitakse suurema väärtusega Rclamp, aitaks see hajumist minimeerida, kuid ei pruugi olla nii efektiivne piike maha suruda .

Viidates ülaltoodud joonisele, võib VR = Vspike tagamiseks kasutada järgmist valemit

Kui leke tähistab trafo induktiivsust ja selle võib leida lühise tekitamise kaudu sekundaarmähises, või alternatiivina võiks lisada rusikareegli väärtuse, rakendades 2 kuni 4% primaarsest induktiivsusest.
Sellisel juhul peaks kondensaator Cclamp olema oluliselt suur, pidurdades pinge tõusu lekkeenergia neeldumisperioodil.
Cclampi väärtuse võib valida vahemikus 100pF kuni 4,7nF, selle kondensaatori sisse salvestatud energia tühjeneb ja värskendab Rclamp kiiresti eacj-lülitustsükli jooksul.
10. samm
Kuidas valida väljundalaldi diood

Selle võib arvutada ülaltoodud valemi abil.
Valige spetsifikatsioonid kindlasti nii, et dioodi maksimaalne vastupidine pinge või VRRM ei oleks väiksem kui 30% kui VRVdiode, ja veenduge ka, et IF või laviini ettepoole suunatud voolu spetsifikatsioon on vähemalt 50% suurem kui IsecRMS. Eelistage juhtivuskao minimeerimiseks schottky dioodi.
DCM-ahela korral võib Flybacki tippvool olla kõrge, seetõttu proovige soovitud efektiivsustaseme suhtes valida diood, millel on madalam ettepoole suunatud pinge ja suhteliselt suurem voolutugevus.
11. samm
Kuidas valida väljundkondensaatori väärtus
A valimine õigesti arvutatud väljundkondensaator tagasilöögi kavandamine võib olla äärmiselt oluline, kuna tagasilennutopoloogias pole dioodi ja kondensaatori vahel salvestatud induktiivenergia saadaval, mis tähendab, et kondensaatori väärtus tuleb arvutada, võttes arvesse 3 olulist kriteeriumi:
1) mahtuvus
2) ESR
3) RMS vool
Minimaalse võimaliku väärtuse saab määrata sõltuvalt maksimaalse vastuvõetava piigi ja piigi väljundpinge funktsioonist ning selle saab kindlaks määrata järgmise valemi abil:

Kus Ncp tähistab esmase külgkella impulsside arvu, mida juhtimisside tagasiside nõuab töö kontrollimiseks määratud maksimaalsest ja minimaalsest väärtusest. See võib tavaliselt nõuda umbes 10 kuni 20 lülitustsüklit.
Iout viitab maksimaalsele väljundvoolule (Iout = Poutmax / Vout).
Väljundkondensaatori maksimaalse RMS-väärtuse tuvastamiseks kasutage järgmist valemit:

Tagasilöögi kindlaksmääratud kõrge lülitussageduse korral tekitab trafo sekundaarselt küljelt saadud maksimaalne tippvool väljundkondensaatori ekvivalentsele ESR-ile vastava kõrge pulsatsioonipinge. Seda arvesse võttes tuleb tagada, et kondensaatori ESRmax nimiväärtus ei ületaks kondensaatori lubatud vastuvõetavat pulsivoolu võimsust.
Lõplik konstruktsioon võib põhimõtteliselt sisaldada kondensaatori soovitud pinge ja pulsivoolu võimekust, lähtudes valitud väljundpinge ja tagasilöögi voolu tegelikust suhtest.

Veenduge, et ESR väärtus määratakse andmelehelt sageduse põhjal, mis on suurem kui 1 kHz, mida võib tavaliselt eeldada vahemikus 10 kHz kuni 100 kHz.
Huvitav oleks märkida, et madala ESR-i tehniliste näitajatega üksikust kondensaatorist võib väljundi pulsatsiooni juhtimiseks piisata. Suuremate tippvoolude jaoks võite proovida lisada väikest LC-filtrit, eriti kui tagasilöök on mõeldud töötama DCM-režiimiga, mis võib tagada väljundis suhteliselt hea pulsatsioonipinge juhtimise.
12. samm
Muud olulised kaalutlused:
A) Kuidas valida esmase külgsilla alaldi pinge ja voolutugevus.

Seda saab teha ülaltoodud võrrandi kaudu.
Selles valemis PF tähistab võimsustegurit toiteallikast, saame rakendada 0,5 juhul, kui õige viide muutub kättesaamatuks. Silla-alaldi jaoks valige dioodid või moodul, mille võimendus on 2 korda suurem kui IACRMS. Pinge nimiväärtuse jaoks võiks selle valida 600 V juures maksimaalse 400 V vahelduvvoolu sisendi spetsifikatsiooni jaoks.
B) Kuidas valida praeguse meele takisti (Rsense):
Selle võib arvutada järgmise võrrandi abil. Tundetakisti Rsense on ühendatud maksimaalse võimsuse tõlgendamiseks tagasilöögi väljundis. Vcsth väärtuse saab määrata kontrolleri IC andmelehele viidates, Ip (max) tähistab primaarset voolu.

C) Kondensaatori VCC valimine:
Optimaalne mahtuvuse väärtus on sisendkondensaatori jaoks ülioluline õige käivitamisperioodi loomiseks. Tavaliselt teeb mis tahes väärtus vahemikus 22uF kuni 47uF selle töö kenasti ära. Kuid kui see on valitud palju madalam, võib see vallandada kontrolleri IC 'pinge all lukustuse', enne kui muundur suudab Vcc areneda. Vastupidi, suurem mahtuvuse väärtus võib muunduri käivitamisaega soovimatult edasi lükata.
Lisaks veenduge, et see kondensaator oleks parima kvaliteediga, väga hea ESR ja pulsatsioonivoolu spetsifikatsioonidega, võrdne väljundiga kondensaatori spetsifikatsioonid . On tungivalt soovitatav ühendada veel üks väiksema väärtusega kondensaator, suurusjärgus 100nF, paralleelselt ülalnimetatud kondensaatoriga ja võimalikult lähedal kontrolleri IC Vcc / maandustihvtidele.
D) Tagasiside ahela konfigureerimine:
Tagasiside silmuse kompenseerimine muutub võnkumise tekitamise peatamiseks oluliseks. Silmusekompensatsiooni konfigureerimine võib olla DCM-režiimi tagasilennu jaoks lihtsam kui CCM, kuna võimsusastmel puudub „õige pool tasapinna null” ja seega pole kompensatsiooni vaja.

Nagu ülaltoodud joonisel on näidatud, saab sirgjoonelisest RC-st (Rcomp, Ccomp) enamasti piisav, et säilitada hea stabiilsus kogu silmuses. Üldiselt võib Rcomp-väärtuse valida ükskõik millise vahemikus 1K kuni 20K, samas kui Ccomp võib olla vahemikus 100nF kuni 470pF.
See lõpetab meie põhjaliku arutelu tagasilöögimuunduri kujundamise ja arvutamise kohta. Kui teil on ettepanekuid või küsimusi, võite need esitada järgmises kommentaarikastis, teie küsimustele vastatakse niipea.
Viisakus: Infineon
Paari: Ultraheli traadita veetaseme indikaator - päikeseenergia Järgmine: PID-kontrolleri mõistmine