Selles postituses käsitletakse elektroonilist mootori pöörlemissageduse regulaatorit või regulaatori vooluahelat, mis kasutab saali efektiandurite võrgu kaudu RPM tagasiside signaali silmust. Idee soovis hr Imsa Naga.
Vooluringi eesmärgid ja nõuded
- Suur aitäh teie aja eest. Usun, et see vooluring sobib ühefaasiliseks toitmiseks. Minu generaator on kolmefaasiline 7KvA ja tahaksin selle siduda diiselmootoriga mootoriga, millel on kiiruse regulaatori asemel gaasipedaal.
- Mida ma sooviksin rakendada, on - „Mootori elektroonilise kiiruse juht”, millel oleks tõenäoliselt elektrooniline servojuhtimisega mehhanism nagu - kiiruseanduri ahel (mootori pöörete andur) servomootori juhtimiseks gaasimehhanismi käivitamiseks, et säilitada mootori ühtlane pöörlemiskiirus generaatorile rakendatava koormuse suhtes.
- See aitaks säilitada nii generaatori sagedust kui ka pinget. Ma suudaksin hoolitseda mehaanilise külje eest, kui kavandate sõbralikult vooluahelat Servo mootori juhtimiseks nii, et seda saaks pöörata kummaski suunas mootori pöörete arvu muutuse suhtes. Tänan teid väga ootuses.
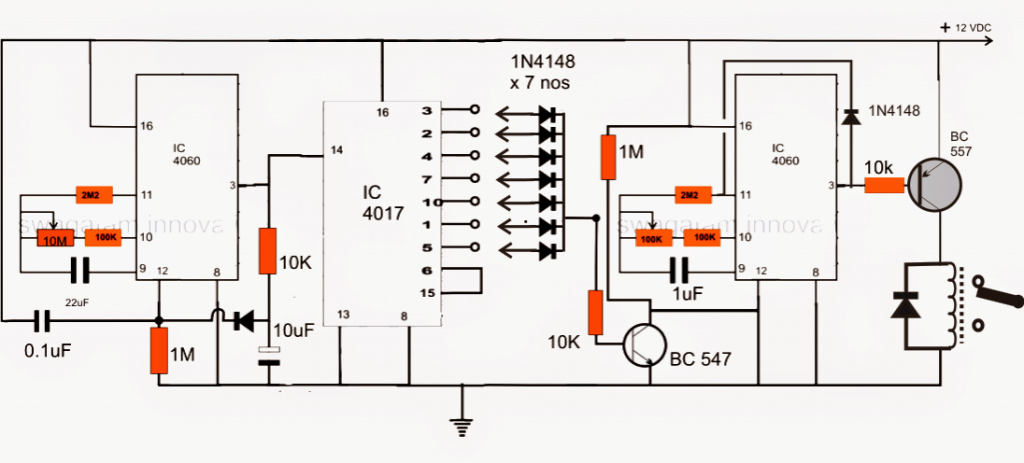
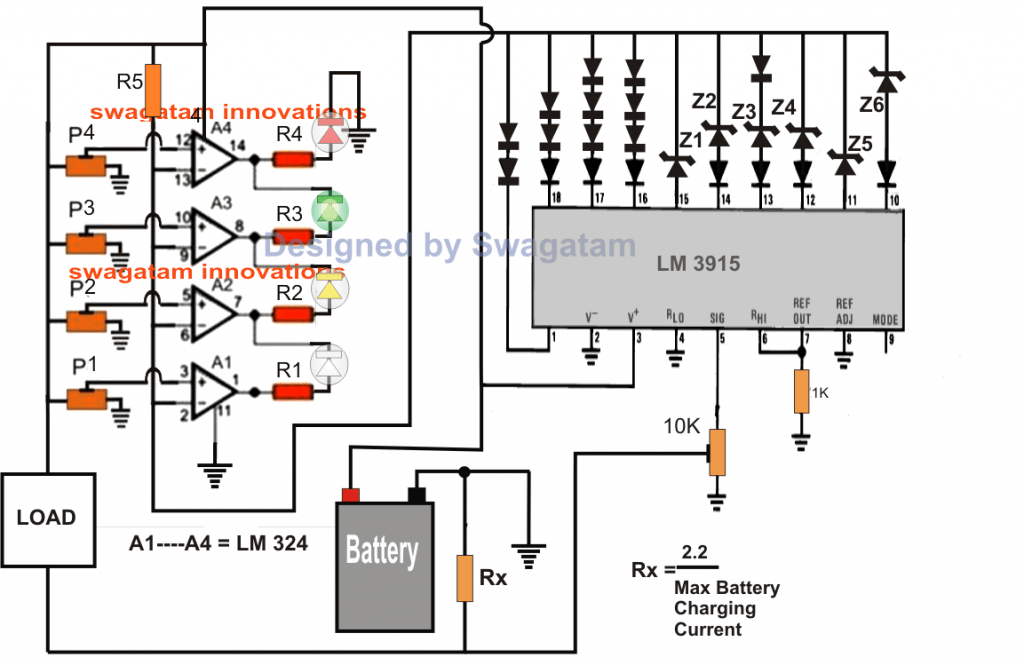
Vooluringi skeem

MÄRKUS. Mootorit võib asendada 12 V vedruga koormatud solenoidiga
Kujundus
Diiselmootori pöörlemissageduse regulaatori või regulaatori vooluringi saab näha ülaltoodud joonisel, kasutades tagasisidepöörlemissageduse protsessorit või a tahhomeetri vooluring
Vasak külg IC1 555 moodustab lihtsa tahhomeetri vooluahela, mis on konfigureeritud tähisega a Halli efekti andur kinnitatud mootori koormarattaga selle pöörlemiskiiruse tuvastamiseks.
RPM teisendatakse proportsionaalselt varieeruvaks pulsisageduseks või sageduseks ja rakendatakse BJT baasil IC1 tihvti nr 2 vahetamiseks.
Ahela töö
IC1 on põhimõtteliselt monostabiilse režiimiga, mis põhjustab selle väljundi proportsionaalselt reguleeriva sisse / välja lülitamise, mille periood määratakse näidatud 1M poti abil.
IC1 väljund, mis kannab RPM-sisu pikendatud ajastatud impulsside kujul, on integreerija etapiga, mis koosneb paarist RC-komponendist, kasutades takistit 1K, 10K ja 22uF, piisavalt silutud. 2.2uF kondensaatorid.
Selles etapis teisendatakse monostabiilse töötlemata RPM andmed mõistlikult sujuvalt või eksponentsiaalselt muutuvaks pingeks.
Seda eksponentsiaalselt muutuvat pinget võib näha ühendatud järgmise astmega IC2 555 tihvtiga nr 5, mis on konfigureeritud astable vooluringiks.
Selle astable ülesandeks on genereerida oma tihvti nr 3 korral väga kitsas või madal PWM-väljund tavapärastes töötingimustes.
Siin viitab tavaline töötingimus olukorrale, kui tajutav pöörete arv on määratud piirides ja IC2 tihvt nr 5 ei saa emitterijälgijalt pinget. Seda madalat PWM-väljundit saab rakendada, reguleerides sobivalt kahte 100k takistit ja 1uF kondensaatorit, mis on seotud IC2 tihvtidega nr 6/2 ja tihvtidega nr 7.
See madal PWM IC2 tihvtist nr 3 ei suuda TIP122 piisavalt tugevalt ümber lülitada ja seetõttu ei suuda näidatud mootoriratta komplekt saada vajalikku hoogu ja jääb seetõttu deaktiveeritud.
Kui pöörete arv hakkab tõusma, hakkab tahhomeeter eksponentsiaalselt kõrgemaid pingeid tootma, mis omakorda põhjustab proportsionaalselt suureneva pinge IC2 tihvtis nr 5.
See võimaldab seejärel TIP122-l raskemini juhtida ja ühendatud mootoril saada piisavat pöördemomenti, nii et see hakkab kinnitatud gaasipedaali aeglustusrežiimi poole vajutama.
See protseduur sunnib diiselmootorit vähendama oma pöörlemiskiirust, mis põhjustab tahhomeetri ja PWM-etappide algsete tingimuste taastamise ning diiselmootori nõutava kontrollitud pöörlemiskiiruse tagamise.
Näidatud gaasimootori paigutuse asemel võiks TIP122 kollektori alternatiivselt juhtmega ühendada CDI üksus diiselmootori identset pöörlemiskiiruse vähendamist, hõlbustamaks tahkes olekus ja käsitletava mootori kiiruse regulaatori või mootori kiiruse regulaatori vooluahela tahkes olekus ja usaldusväärsemat rakendamist.
Kuidas seadistada
Esialgu hoidke IC1, IC2 etapid lahti ühendatud, eemaldades emitteri jälgija lingi IC2 tihvtiga # 5.
Järgmisena veenduge, et kaks 100k takistit on nõuetekohaselt muudetud ja reguleeritud nii, et IC2 tihvt nr 3 tekitaks võimalikult kitsad PWM-id (@ umbes 5% ON-ajalise kiirusega).
Pärast seda kasutage a 0 kuni 12 V reguleeritav toiteallikas , rakendage muutuvat pinget IC2 tihvti nr 5 juures ja kinnitage proportsionaalselt kasvav PWM pinge nr 3 juures.
Kui astable sektsiooni on testitud, tuleb selle tahhomeetrit kontrollida, rakendades teadaolevaid RPM-impulsse, mis vastavad soovitud ületatud RPM-le. Reguleerimisel emitterijälgija BJT alus on nii seadistatud, et selle emitter suudaks genereerida vähemalt 10 V või piisavalt taset, et IC2 PWM tekitaks ühendatud pedaali juhtmootoril vajaliku pöördemomendi.
Pärast mõningast täiendavat näpistamist ja katsetamist võite eeldada mootori ja sellega seotud koormuse vajaliku automaatse kiiruse reguleerimise saavutamist.
UUENDAMINE
Kui mootor asendatakse vedruga solenoidiga, võib ülaltoodud konstruktsiooni palju lihtsustada, nagu allpool esitatud:

Kavandatud mootori kiiruse automaatse reguleerimise saavutamiseks võiks elektromagnetvõlli ühendada gaasipedaaliga.
Lisasuvade kohta sageduse ja pinge muunduri kohta leiate artiklist see artikkel .
Paari: Taimeriga juhitav spordisaali rakenduste vooluring Järgmine: Aku laadimine Piezo Mat ahelaga