Postitus kirjeldab üksikasjalikult erinevaid võimsusteguri korrigeerimise ahela või PFC-ahela konfigureerimise meetodeid SMPS-i kujundustes ja selgitab nende topoloogiate parimaid tavasid, et see vastaks kaasaegsetele PFC-piirangute juhistele.
Tõhusate toiteallikate väljatöötamine pole kunagi olnud nii lihtne, kuid aja jooksul on teadlased suutnud lahendada suurema osa asjassepuutuvatest probleemidest ja üsna samamoodi optimeeritakse ka tänapäevaseid SMPS-disaine parimate võimalike tulemustega tänu tekkivad regulatiivsed standardid, millel oli oluline roll kaasaegsete toiteallikate rangemate kvaliteediparameetrite rakendamisel.
PFC suunised
Kaasaegsed toiteallika kvaliteedipiirangud on üsna agressiivselt kehtestatud ühiselt tootjate, tarnijate ja muude asjaomaste juhtorganite jõupingutustega.
Tänapäevaste toiteallikate jaoks ette nähtud paljude kvaliteediparameetrite hulgas on IEC 61000-3-2 reeglites kohustuslikuks nõudeks kuulutatud võimsusteguri korrigeerimine (PFC), mis tegelikult toimub harmoonilise tühistamise vormis.
Selle tõttu on disainerid sunnitud nende toiteallikate kujundamisel võimsusteguri korrigeerimise etappide kavandamisel silmitsi seisma raskemate väljakutsetega, et täita neid rangeid kaasaegseid seadusi ning toiteallikad muutuvad oma spetsifikatsioonide ja rakenduste valiku abil üha hirmsamaks, struktureerides õigeid PFC-ahelaid ei muutu areeni paljude tootjate jaoks lihtsamaks.
Esitatud õpetused on spetsiaalselt pühendatud kõigile ühendustele ja spetsialistidele, kes tegelevad tootmise või arendamisega flyback SMPS-i kujundamine nende jaoks kõige ideaalsemate PFC kavandite ja arvutuste hõlbustamiseks vastavalt nende individuaalsetele nõuetele.
Nendes õpetustes sisalduvad arutelud aitavad teil kujundada PFC-vooluringe isegi märkimisväärselt suurte seadmete jaoks vahemikus kuni 400 vatti, 0,75 amprit.
Lugejad saavad ka võimaluse õppida üheastmeliste isoleeritud muundurite valimist, mis sisaldab ka LED-draivereid. Samm-sammult disaini õpetus ja juhised koos süsteemitaseme võrdlustega valgustatakse paljusid jõuelektroonika valdkonnas aktiivselt töötavaid disainereid nende konkreetsete rakendusvajaduste jaoks optimaalseima lähenemisviisiga
Võimsusteguri korrigeerimise eesmärk
Võimsusteguri parandusahela optimeerimine kaasaegsetes SMPS (lülitusrežiimi toiteallikas) seadmetes võib lähiminevikus areneda paljude täiustatud asjakohaste integraallülituste (IC) ilmumise tõttu, mis on võimaldanud koostada erinevaid PFC disainilahendusi, millel on spetsiifilised töörežiimid ja individuaalne väljakutse käsitlemise võime.
SMPS-i topoloogiate hulga suurenemisega on PFC-de väljatöötamise ja rakendamise keerukus tänapäeval samuti süvenenud.
Esimeses õpetuses õpime disaini üksikasju, mida kõik spetsialistid eelistavad enamasti parandusi.
Põhimõtteliselt aitab võimsusteguri korrigeerimine optimeerida võrguväliste toiteallikate sisendvoolu, nii et need suudaksid saadaolevast võrgusisendist tegelikku võimsust suurendada.
Vastavalt tavapärasele nõudele peab antud elektriseade imiteerima ennast puhta takistusega koormana, nii et see võimaldab reaktiivvõimsuse tarbimist nullini.
See tingimus tekitab peaaegu nulli sisendiga harmoonilisi voolusid, teisisõnu võimaldab see tarbitud voolul olla ideaalselt kooskõlas sisendtoite pingega, mis on tavaliselt siinuslaine kujul.
See saavutus hõlbustab seadet elektrivõrgust saadava „tegeliku jõu” tarbimiseks kõige optimaalsemal ja tõhusamal tasemel, mille tulemuseks on elektri raiskamise minimeerimine ja selle tõhususe suurendamine.
Selline efektiivne elektrienergia kasutamine aitab seadmel end kõige tõhusamalt esitleda, vaid ka kommunaalettevõtete ja protsessi jaoks kaasatud kapitaliseadmete jaoks.
Lisaks võimaldab ülaltoodud funktsioon elektriliinidel olla vaba harmoonilistest ja sellest tulenevatest häiretest võrgus olevates seadmetes.
Peale ülalnimetatud eeliste on PFC kaasamine tänapäevastesse toiteallikatesse ka Euroopas ja Jaapanis kehtestatud normatiivsete nõuete järgimiseks IEC61000-3-2, millele kõik elektriseadmed peaksid vastama.
Eespool nimetatud tingimust on reguleeritud enamiku elektroonikaseadmete puhul, mille D-klassi seadmete standardite kohaselt võib võimsus ületada 75 vatti või mis on veelgi kõrgemad, täpsustades liinisageduse harmooniliste suurima amplituudi kuni 39. harmoonikani.
Lisaks nendele standarditele kasutatakse PFC-d ka muude tõhususte tagamiseks, nagu arvutitele ülioluline Energy Star 5.0 ning toiteallikasüsteemide ja telerite jaoks Energy Star 2.0 alates 2008. aastast.
Võimsusteguri määratlus
PFC või võimsusteguri korrektsiooni võib määratleda tegeliku võimsuse ja näiva võimsuse suhtena ning väljendada järgmiselt:
PF = tegelik võimsus / näiline võimsus, kus tegelik võimsus on väljendatud
Vatti, samas kui näilist võimsust väljendatakse VA-s.
Selles väljendis määratakse tegelik võimsus voolu ja pinge hetkelise korrutise faasi või tsükli keskmisena, samal ajal kui näivvõimsust loetakse voolu efektiivväärtuseks korrutatuna pingega.
See viitab sellele, et alati, kui voolu ja pinge analoogid on sinusoidaalsed ja üksteisega faasis, on tulemuseks saadud võimsustegur 1,0.
Kuid olekus, kus vool on pinge parameetrid sinusoidaalsed, kuid mitte faasilised, tekitab võimsustegur, mis on faasinurga koosinus.
Eespool kirjeldatud võimsusteguri tingimusi kohaldatakse juhtudel, kus mõlemad on nii pinge kui ka vool siinused, koos olukorraga, kus kaasnev koormus koosneb takistavatest, induktiivsetest ja mahtuvuslikest komponentidest, mis võivad olla kõik mittelineaarsed, ei reguleeri sisendvoolu ja pinge parameetritega.
SMPS-i topoloogiad toovad võrguliinile tavaliselt mittelineaarse impedantsi ülaltoodud selgitatava vooluahela tõttu.
Kuidas SMPS töötab
SMPS-vooluahel sisaldab sisendis alaldi astet, mis võib olla poollaine või täislaine alaldi, ja täiendavat filtri kondensaatorit, et kogu alaldatud pinge hoida sisendtoite siinuse tipptasemel kuni järgmise tipu ajani ilmub siinuslaine, mis kordab selle kondensaatori laadimistsüklit, mille tulemuseks on kogu nõutav püsiv tipp-pinge.
See kondensaatori laadimise protsess igas vahelduvvoolu tipptsüklis nõuab, et sisend peab olema varustatud piisava vooluga SMPS-i koormustarbimise täitmiseks nende tippintervallide vahel.
Tsükkel viiakse läbi suure voolu kiire kondensaatorisse viimisega, mis rakendatakse koormusele tühjendamise kaudu kuni järgmise tipptsükli saabumiseni.
Selle ebaühtlase laadimis- ja tühjenemismustri puhul on soovitatav, et kondensaatori impulsivool oleks 15% suurem kui koormuse keskmine nõue.

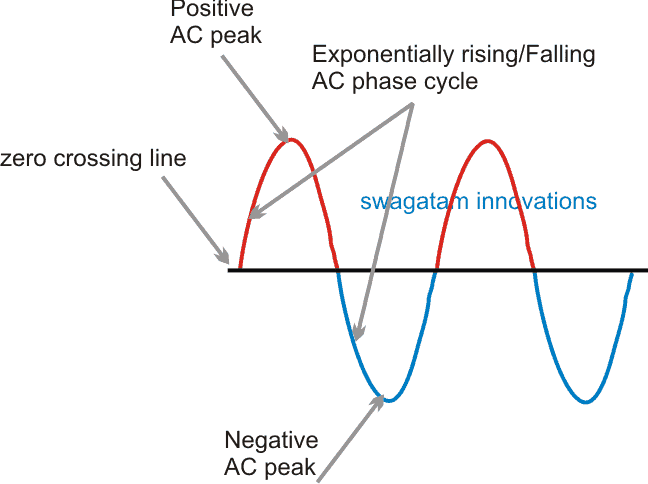
Ülaltoodud joonisel näeme, et vaatamata märkimisväärsele moonutusele on pinge ja voolu parameetrid ilmselt üksteisega faasis.
Kuid kui rakendame ülaltoodule mõistet „faasinurga koosinus”, võib see põhjustada vale järelduse, et toiteallika võimsustegur on 1,0
Ülemine ja alumine lainekuju näitavad voolu harmoonilise sisalduse hulka.
Siin näidatakse “põhiline harmooniline sisu” 100% amplituudiga võrreldes, samal ajal kui kõrgemad harmoonilised on esitatud põhiamplituudi täiendavate protsentidena.
Kuid kuna tegeliku võimsuse määrab ainult põhikomponent, kui teised täiendavad harmoonilised esindavad ainult näilist võimsust, võib tegelik võimsustegur olla üsna alla 1,0.
Nimetame seda kõrvalekallet mõistega moonutustegur, mis on põhiliselt vastutav SMPSi üksustes mitteühtsuse võimsusteguri tekitamise eest.
Tõelise ja näilise jõu väljendus
Üldise avaldise, mis käsitleb seost tegeliku ja näilise jõu vahel, võib anda järgmiselt:

Kui cosΦ moodustab voolu / pinge lainekuju vahelisest faasinurgast ing väljuva nihketeguri ja cosΦ tähistab moonutustegurit.

Allolevale skeemile viidates võime olla tunnistajaks olukorrale, mis näitab täiuslikku võimsusteguri korrektsiooni.

Näeme, et siin kordab praegune lainekuju ideaaljuhul pinge lainekuju, kuna mõlemad töötavad ilmselt faasiliselt ja üksteisega sünkroonis.
Seetõttu võib siin eeldada, et sisendvooluharmoonikud on peaaegu nullid.
Võimsusteguri korrektsioon vs harmooniline reduktsioon
Varasemaid illustratsioone vaadates on ilmne, et võimsustegur ja madalad harmoonilised toimivad üksteisega sünkroonis.
Üldiselt arvatakse, et kui vastavate harmooniliste piirid on välja toodud, võib see piirata elektriliinide sisendvoolu saastumist, kõrvaldades häirivad vooluhäired teiste läheduses olevate seadmetega.
Seetõttu, ehkki sisendvoolu töötlemist võib nimetada „võimsusteguri korrektsiooniks“, on täpsustamise väljundsuuruseks arvatud, et seda töötlust peetakse rahvusvaheliste suuniste kohaselt harmooniliseks sisuks.
SMPS-topoloogiate puhul on tavaliselt nihkeelement ligikaudu ühtsus, tekitades järgmised võimsusteguri ja harmoonilise moonutuse vahelised seosed.

Avalduses tähistab THD kogu harmoonilist moonutust kui kahjulike harmooniliste ruutkogumit põhisisu suhtes, väljendades seonduva harmoonilise sisu suhtelist kaalu, viidates põhilisele vastele. Teine võrrand seob THD absoluutarvu ja mitte protsentuaalselt, väljendades, et THD peab olema ühtse PF loomiseks sisuliselt null.
Võimsusteguri korrigeerimise tüübid
Ülaltoodud joonisel kujutatud sisendi lainekuju karakteristik näitab SMPS-seadme tüüpilist 'aktiivset' tüüpi parandustegurit, mis on sisestatud alaldi alaldi konfiguratsiooni ja filtri kondensaatori vahele ning PFC-integraallülituse kaudu, mis kontrollib menetlust koos sellega seotud vooluringidega tagades, et sisendvool järgib ühtselt sisendpinge lainekuju.
Seda tüüpi töötlemist võib pidada kõige levinumaks PFC tüübiks, mida kasutatakse tänapäevastes SMPS-ahelates, nagu on näha alloleval joonisel.
Seda öeldes ei ole mingil juhul kohustuslik, et kavandatava PFC jaoks kasutatakse ainult 'aktiivseid' versioone, mis kasutavad IC-sid ja pooljuhte. Tavaliselt on teretulnud ka muud konstruktsioonivormid, mis võivad tagada mõistliku PFC koguse, mis jääb alla kehtestatud eeskirjade.
On märganud, et tegelikult suudab üks 'aktiivse' kolleegi positsiooni asendav induktiivpool harmoonilisi üsna rahuldavalt tagasi lükata, kontrollides piike ja jaotades voolu sisendpingega üsna tõhusalt üsna tõhusalt.
Passiivne PFC disain
Kuid see passiivse PFC juhtimise vorm võib nõuda märkimisväärselt mahukat rauast südamikuga induktiivpooli ja seetõttu saab seda kasutada rakendustes, kus kompaktsus pole ülioluline nõue. (lk 12)
Passiivne üksikinduktor võib tunduda PFC jaoks kiire lahendus, kuid suure võimsusega rakenduste jaoks võib suurus muutuda ebahuvitavaks, kuna see on praktiliselt suur.
Alloleval graafikul saame tunnistada 250 vatise PC SMPS-i variandi kolme arvu sisendnäitajaid, millest igaüks esindab praegust lainekuju samaväärse skaalateguri juures.
Me näeme hõlpsasti, et passiivsel induktoril põhineva PFC tulemus on 33% kõrgem voolu tipp kui aktiivse PFC filtri vaste korral.
Isegi kui see võib läbida IEC61000-3-2 standardid, ei ole see kindlasti hiljutise rangema 0.9PF nõude reegli tasemel ja see ei vasta selle uue standardi kohaselt seatud kvaliteedikontrolli tasemele.
Põhiline plokkskeem

Tänu jätkuvale elektroonilise turu trendile, kus võime näha vaskkulude kasvu koos magnetiliste südamike protsessi tõusu ja kaasaegsete, palju odavamate pooljuhtmaterjalide kasutuselevõtuga, pole üllatav, kui märkame aktiivset PFC-lähenemist saada ülipopulaarseks kui passiivne kolleeg.
Ja seda suundumust võib näha lähitulevikus veelgi tugevamaks, esitades paljude SMPS-i disainerite ja tootjate jaoks üha arenenumaid ja täiustatud PFC-lahendusi.

Sisendjoone harmooniliste võrdlemine standarditega IEC610003-2
Alloleval joonisel näeme kolme eraldi 250-vatise arvuti SMPS-i tulemuste jälgi, viidates IEC6000-3-2 piirangutele. Näidatud piirang kehtib kõigi D-klassi vidinate, näiteks arvutite, telerite ja nende monitoride kohta.
Näidatud harmoonilise sisalduse piirmäär on fikseeritud vastavalt seadmete sisendvõimsusele. Tuledega seotud toodete puhul järgitakse tavaliselt selliseid LED-tulesid, kompaktluminofoorlampe, C-klassi piiranguid, mis on samaväärsed nende sisendvõimsuse piiridega.
Teiste mittetraditsiooniliste elektroonikatoodete PFC piirmäär on seatud proportsionaalselt minimaalse 600-vatise sisendvõimsusega.
Kui vaatame passiivset PFC jälge, siis leiame, et see on vaevalt kooskõlas seatud piirangupiiranguga, vaid lihtsalt puudutage ja minge olukorda (harmoonilisel nr 3)

Passiivsete PFC funktsioonide analüüsimine
Järgmisel joonisel näeme klassikalise näite passiivsest PFC-vooluringist, mis on mõeldud traditsioonilise arvuti toiteallika jaoks. Märkimisväärne on siin PFC induktori keskkraani ühendamine sisendliini sisendpingega.
220V valimisrežiimis (lüliti on avatud) rakendatakse induktiivpooli kogu kahte osa alaldusvõrguga, mis töötab nagu täissilla alaldi ahel.
Kuid 110 V režiimis (lüliti on suletud) kasutatakse ainult 50% või pool poolist pooli kasutatava pooli kaudu, samal ajal kui alaldi sektsioon muudetakse nüüd poollaine alaldi kahekordistajaks.
Kuna 220V valik peab pärast täieliku laine alaldamist genereerima umbes 330V, moodustab see SMPS-i siinisisendi ja sellel on võimalus kõikuda vastavalt sisendliini pingele.
Vooluringi näide

Kuigi see passiivne PFC disain võib oma jõudlusega tunduda üsna lihtne ja muljetavaldav, võib sellel olla mõni märkimisväärne puudus.
Lisaks PFC mahukale olemusele on kõigepealt kaks muud asjaolu, mis mõjutavad selle toimimist: mehaanilise lüliti lisamine, mis muudab süsteemi seadme kasutamisel võimalike inimlike eksimuste suhtes haavatavaks, ja ka sellega seotud kulumisprobleemid.
Teiseks, stabiliseerimata liinipinge põhjustab suhtelise ebaefektiivsuse kulutõhususe ja alalisvoolu kuni alalisvoolu muundamise täpsuse eesmistel osadel, mis on seotud PFC väljundiga.
Kriitilise juhtimisrežiimi (CrM) kontrollerid
Kontrolleri staadium, mida nimetatakse kriitiliseks juhtimisrežiimiks, mida nimetatakse ka üleminekurežiimiks või piirijuhtimisrežiimi (BCM) kontrolleriks, on vooluringide konfiguratsioonid, mida võib tõhusalt kasutada valgustuselektroonika rakendustes. Ehkki selle kasutatavus on probleemideta, on need kontrollerid suhteliselt kallid.
Järgmine skeem 1-8 näitab tavalist CrM-kontrolleri vooluahela ülesehitust.

Tavaliselt on CrM-kontrolleri PFC-l ülaltoodud skeem, mida saab mõista järgmiste punktide abil:
Võrdluskordisti astme sisend võtab asjakohase mõõtmetega signaali seotud veavõimendi väljundist, millel on madalsageduslik poolus.
Kordisti teist sisendit saab vaadelda alaldatud vahelduvvoolu sisendist eraldatud stabiliseeritud alalisvoolu kinnitatud pingega.
Seega on kordisti saadav väljund veavõimendi väljundist tuleneva suhtelise alalisvoolu ja viidatud signaali vahelduvvoolu sisendist täislaine AC siinusimpulsside kujul korrutis.
Kordistajaastme väljundit võib näha ka täislaine siinusimpulsside kujul, kuid sobivalt vähendatakse seda proportsionaalselt rakendatud veasignaali (võimendusteguri) kasutamisega sisendpinge võrdlusalusena.
Selle allika signaali amplituud on sobivalt täpsustatud, et saavutada õige määratud keskmine võimsus ja tagada nõuetekohaselt reguleeritud väljundpinge.
Staadium, mis vastutab voolu amplituudi töötlemise eest, põhjustab voolu voolu vastavalt multiplikaatori väljundlaine kujule, kuid liinisageduse voolu signaali amplituud (pärast silumist) võib eeldada olevat pool sellest kordaja astme võrdlusest .
Siin võib voolu kujundavate vooluringide toiminguid mõista järgmiselt:

Viidates ülaltoodud skeemile, tähistab Vref kordisti astmest väljuvat signaali, mis suunatakse edasi võrdluse ühe opampi, mille teisele sisendile viidatakse praeguse lainekuju signaaliga.
Toitelüliti korral suureneb induktori vool aeglaselt, kuni šundi signaal on jõudnud Vrefi tasemeni.
See sunnib võrdlejat muutma oma väljundit Sees asendisse VÄLJAS, lülitades voolu välja.
Niipea kui see juhtub, hakkab induktiivpoolile järk-järgult tõusnud pinge aeglaselt langema nulli suunas ja kui see puudutab nulli, pöördub opamp väljund uuesti sisse ja lülitub uuesti sisse ning tsükkel jätkub.
Kuna ülaltoodud karakteristiku nimetus tähistab, ei lase süsteemi juhtimismuster induktorivoolul jätkuva ja katkendliku lülitusrežiimi korral tulistada etteantud piirist kõrgemale.
See korraldus aitab prognoosida ja arvutada seost Opampist tuleneva väljundi keskmise tippvoolu taseme vahel. Kuna vastus on kolmnurklainete kujul, tähistab lainekuju keskmine täpselt 50% kolmnurga lainekujude tegelikest tippudest.
See tähendab, et kolmnurgalainete praeguse signaali tulemuseks oleks keskmine väärtus = induktiivvool x R-tähendus või lihtsalt pool opampi etteantud võrdlustasemest (Vref).
Ülaltoodud põhimõtet kasutavate regulaatorite sagedus sõltub liini pingest ja koormusvoolust. Sagedus võib kõrgema liinipinge korral olla palju suurem ja varieeruda, kuna liini sisend varieerub.
Sagedusega kinnitatud kriitilise juhtivuse režiim (FCCrM)
Vaatamata selle populaarsusele erinevates tööstusliku toiteallika PFC juhtimisrakendustes, on ülalkirjeldatud CrM-kontrolleril mõned olemuslikud puudused.
Seda tüüpi aktiivse PFC-juhtimise peamine puudus on sageduse ebastabiilsus liini- ja koormustingimuste suhtes, mis näitab sageduse suurenemist kergemate koormuste ja kõrgemate liinipingete korral ning ka iga kord, kui sisendsiinus läheneb nullpunktidele.
Kui püütakse seda probleemi lahendada sagedusklambri lisamisega, annab tulemuseks moonutatud voolu lainekuju, mis näib vältimatu, kuna “Ton” jääb selle protseduuri jaoks reguleerimata.

Kuid alternatiivse tehnika väljatöötamine aitab saavutada tõelist võimsusteguri korrektsiooni ka katkestusrežiimis (DCM). Toimimispõhimõtet saab uurida alloleval joonisel ja lisatud võrranditega.

Ülaltoodud diagrammile viidates saab mähise tippvoolu hinnata lahendades:

Keskmine mähisvool vastavalt lülitustsüklile (mida lisaks eeldatakse antud lülitustsükli hetkelise vooluna, tulenevalt asjaolust, et lülitussagedus on tavaliselt suurem kui liinisagedusel, millel liinil pinge muutused toimuvad ) väljendatakse valemiga:

Eeltoodud seose ja terminite lihtsustamise kombineerimine annab järgmise:

Ülaltoodud väljend viitab selgelt ja vihjab sellele, et juhul kui rakendatakse meetodit, mille korral algoritm hoolitseb ton.tcycle / Tsw püsiva taseme eest, võimaldaks see meil saavutada siinuslainejoone voolu, millel on ühtsuse võimsustegur isegi katkendlikus töörežiim.
Kuigi ülaltoodud kaalutlused näitavad kavandatud DCM-kontrolleri tehnika jaoks mõningaid selgeid eeliseid, ei tundu see olevat ideaalne valik seonduvate kõrge tippvoolu tasemete tõttu, nagu on näidatud järgmises tabelis:

Ideaalsete PFC-tingimuste saavutamiseks oleks mõistlik lähenemisviis rakendada tingimus, kus DCM- ja Crm-režiimid ühendatakse, et neist kahest analoogist parim välja lüpsta.
Seega, kui koormustingimused pole rasked ja CrM töötab kõrgel sagedusel, läheb vooluring DCM-i töörežiimi ja juhul, kui koormusvool on kõrge, lastakse Crm-tingimustel püsida nii, et praegused piigid ei ei kipu ületama soovimatuid kõrgeid piire.
Sellist optimeerimist kahes soovitatud juhtimisrežiimis saab kõige paremini visualiseerida järgmisel joonisel, kus kahe juhtimisrežiimi eelised ühendatakse kõige soovitavamate lahenduste saavutamiseks.

Jätkub juhtimisrežiimiga
PFC pidev juhtivusrežiim võib muutuda SMPS-i disainides üsna populaarseks tänu nende paindlikule rakendusfunktsioonile ja ulatusele ning sellega seotud mitmetele eelistele.
Selles režiimis hoitakse praegust tipppinget madalamal tasemel, mille tulemuseks on minimaalsed lülituskaod vastavate komponentide piires, ja lisaks on sisendi lainetus renderdatud minimaalsel tasemel suhteliselt püsiva sagedusega, mis omakorda võimaldab silumisprotsessi palju lihtsamaks sama.
Järgmisi CCM-tüüpi PFC-ga seotud atribuute tuleb veidi põhjalikumalt arutada.
Vrms2 juhtimine
Üks elutähtsatest omadustest, mida enamus PFC disaini universaalselt rakendatakse, on võrdlussignaal, mis peab olema alandatud sisendi volaaži astmelt alla imiteerimine.
See sisestatud pinge minimeeritud alandatud ekvivalent rakendatakse lõpuks vooluahelas õige väljundvoolu lainekuju kujundamiseks.
Nagu ülalpool arutatud, kasutatakse selle toimingu jaoks tavaliselt mitmekordse vooluahela etappi, kuid nagu me teame, et kordaja vooluahel võib olla suhteliselt vähem tasuv kui traditsiooniline twn-sisendiga kordistajasüsteem.
Klassikaline näide paigutusest on näha alloleval joonisel, mis näitab pideva režiimi PFC lähenemist.
Nagu näha, käivitatakse siin võimendusmuundur keskmise voolurežiimi PWM abil, mis vastutab induktiivvoolu (muunduri sisendvoolu) mõõtmete määramise eest, viidates käsuvoolu signaalile V (i) , mida võib vaadelda kui sisendpinge V (in) vähendatud ekvivalenti VDIV osaga.
See viiakse läbi veapingesignaali jagamisel sisendpinge signaali ruuduga (kondensaatori Cf abil silutud, et luua lihtsustatud mastaabitegur sisendpinge taseme suhtes).

Ehkki teile võib osutuda pisut ebamugavaks, kui näete veasignaali jagamist sisendpinge ruuduga, on selle meetme taga silmuse võimenduse (või mööduva sõltuva reaktsiooni) loomine, mis ei pruugi põhineda sisendpingel vallandamine.
Pinge ruutu jagamine neutraliseerib koos VWIN-i väärtusega koos PWM-juhtelemendi ülekandefunktsiooniga (induktori praeguse graafiku kalle proportsionaalsus sisendpingega).
Kuid selle PFC-vormi üks negatiivne külg on kordisti paindlikkus, mis sunnib seda etappi olema veidi üle kavandatud, eriti vooluahela võimsuse käitlemise sektsioonid, nii et see säilitab ka kõige halvematel juhtudel energia hajumise stsenaariumid.
Keskmine praeguse režiimi juhtimine
Ülaltoodud joonisel näeme, kuidas kordajast V (i) toodetud võrdlussignaal tähistab lainekuju kuju ja PFC sisendvoolu skaalavahemikku.
Näidatud PWM-etapp vastutab keskmise sisendvoolu võrdlusväärtusega tagamise eest. Protseduur viiakse läbi keskmise voolurežiimi regulaatori etapis, nagu on näha allpool toodud joonisel.

Keskmine voolurežiimi juhtimine on põhimõtteliselt konfigureeritud reguleerima keskmist voolutugevust (sisend / väljund), viidates juhtsignaalile Icp, mis omakorda luuakse madalsagedusliku alalisvooluahela abil veavõimendi vooluahelas ja see pole midagi muud kui sellele varasemal joonisel näidatud signaalile Vi vastav ekvivalentvool.
Lavavooluvõimendi toimib lainekuju kuju reguleerimiseks nii vooluintegraatori kui ka veavõimendina, samas kui kogu Rcp-ga genereeritud Icp-signaal vastutab alalisvoolu sisendpinge juhtimise eest.
Vooluvõimendi lineaarse reaktsiooni tagamiseks peab selle sisend olema sarnane, mis tähendab, et kogu R-i (šundi) tekitatud potentsiaalne erinevus peab olema sarnane Rcp-ga tekitatud pingega, kuna meil ei saa alalisvoolu olla vooluvõimendi mitteinverteeriv takisti sisend.
Vooluvõimendi genereeritud väljund peaks olema „madala sagedusega“ veasignaal, mis sõltub šundi keskmisest voolust, samuti Isp signaalist.
Nüüd genereerib ostsillaator saehammasignaali, mida kasutatakse ülaltoodud signaali võrdlemiseks sellega, nagu seda tehakse pingerežiimi juhtimissüsteemiga.
Selle tulemusel luuakse PWM-id, mis määrati ülalnimetatud kahe signaali võrdlemisega.
Täiustatud PFC-lahendused
Eespool käsitletud erinevad PFC juhtimise meetodid (CrM, CCM, DCM) ja nende variandid pakuvad disaineritele mitmekülgseid võimalusi PFC ahelate konfigureerimiseks.
Nendest valikutest hoolimata on tõhususe mõttes paremate ja arenenumate moodulite saavutamise järjekindel otsing võimaldanud nende rakenduste jaoks diagnoosida keerukamaid kujundusi.
Arutame selle kohta rohkem, kuna seda artiklit värskendatakse selle teema uusimaga.
Eelmine: Kuidas valida liitiumioonaku jaoks õige laadija Järgmine: Solar E rikša vooluring