
WSG-DSA on haaratsisõrm, mis integreerib puutetundlikkuse kõrge eraldusvõimega profiilide tagasiside saamiseks haaramise ajal. Senseerimiseks kasutab ta intelligentset kombatavat andurit DSA9205i. See sobib WSG põhilõugade kohale ja on haarderegulaatoriga otse ühendatud lõualuude integreeritud anduripordi kaudu, nii et taktilise seadme lisamiseks teie käitlusrakendustesse pole vaja väliseid komponente ja kaableid. Seda tüüpi sõrmeandurid tuvastatakse WSG poolt automaatselt ja parameetrite järgi. Rõhuprofiili saab kasutada haaratsikontrolleri seestpoolt, kasutades võimast skriptimisliidest. Selles artiklis käsitletakse puutetüüpe andurid ja nende töö .
Mis on kompimisandur?
Taktiilne andur on seade. See mõõdab saabuvat teavet vastusena füüsilisele suhtlemisele keskkonnaga. Puutetaju inimestel on üldjuhul modelleeritud, s.t naha ja kinesteetiline meel. Naha puudutus suudab tuvastada mehaanilisest stimulatsioonist, valust ja temperatuurist tulenevaid stiimuleid. Kinesteetiline puudutus saab andurite sisendid lihastes, kõõlustes ja liigestes paiknevatest retseptoritest.

Taktiilne andur
Taktsiooniandurite tüübid
Allpool on erinevaid kombatavaid andureid
- Jõu / pöördemomendi andur
- Dünaamiline andur
- Termoandur
Jõu / pöördemomendi andur
Jõu / pöördemomendi andureid kasutatakse kombineerituna kombatava massiiviga, et anda teavet jõu juhtimiseks. Need andurite tüübid tajub koormust kõikjal nagu manipulaatori distaalne lüli ja nahasensorina piirangutes. Nahasensor tagab jõu täpsema mõõtmise suurema ribalaiuse korral. Kui manipulaatori link on määratletud üldiselt ja eeldatakse signaalipunkti kontakti, siis jõu / pöördemomendi andur võib anda teavet jõu ja hetkede kontakti asukoha kohta - seda nimetatakse sisemiseks puutetundlikuks. Pöördemomendi anduri pilt on näidatud allpool.

Jõu- või pöördemomendi andur
Dünaamiline andur
Dünaamilised andurid on väiksemad kiirendusmõõturid sõrmeliistade või robot sõrme naha juures. Üldine funktsioon nagu Paciniuse rakud inimestel ja vastavate väljadega võrdselt suured, seega piisab kogu sõrme jaoks ühest või kahest naha kiirendusmõõdikust. Need andurid tuvastavad tõhusalt kontakti tekke ja katkemise, vibratsiooni, mis on seotud libiseva tekstuuriga pindadega.

Dünaamiline andur
Pinge määraandur on teist tüüpi dünaamiline puutetundlik andur. Kui sõrmeots libiseb pinnal mõne cm / s üldiste väikeste muhkude või süvenditega, muutusid naha ajutised muutused oluliseks. Piesoelektriline polümeer nagu PVDF tekitab kahjustuseks vastuseks laengu, mida saab rakendada voolu tekitamiseks, mis on otseselt proportsionaalne muutuste ulatusega.
Termoandur
Termosensorid on inimese jaoks olulised valmistatavate esemete materjalide tuvastamiseks, kuid mõnda neist kasutatakse ka robootikas. Soojusandur hõlmab naha termiliste gradientide tuvastamist, mis vastavad nii objekti temperatuurile kui ka soojusjuhtivusele. Robotilised termoandurid on seotud Peltieri ristmikega koos termistorid .

Termoandur
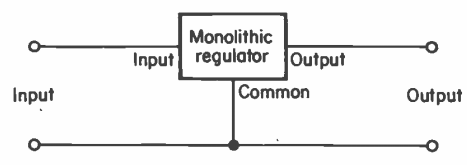
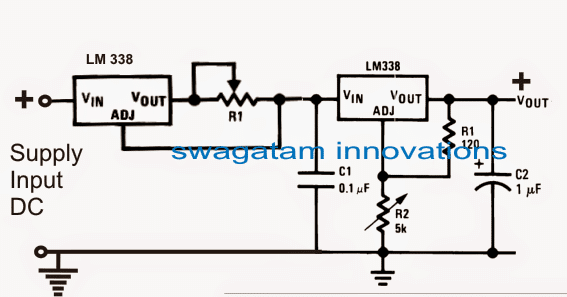
Taktsioonianduri tööpõhimõte ja vooluringi skeem
Kompimisandurid on välja töötatud selleks, et pakkuda puutetundlikke võimeid teleoperatiivsetele manipulaatoritele ja intelligentsetele robotitele. Taktsiooniandurid suudavad tuvastada kombatavatele pikslitele rakendatava normaaljõu jõu juhtimise ja puutetavate piltide hüpnotiseerimiseks ning objekti tuvastamiseks. Taktiilsete piltide ja normaaljõudude saamiseks on tangentsiaalne teave ülioluline jõu kontrollimiseks ja slaidide vältimiseks, mis on hüpnotiseeriv ülesande edukuse jaoks - seega on vaja kolmemõõtmelisi puutetundlikke andureid.

Taktsioonianduri vooluringi skeem
Piezoresistive, mahtuvuslikke ja valikulisi andurelemente kasutades on välja töötatud mitu kolmemõõtmelist puutetundlikku andurit ja need kompimisandurid on valmistatud MEMS-tehnoloogia . Integreeritud andurelemendid ja eeltöötlusahelad on mõeldud kompaktsuse tagamiseks, kuid need on enamiku rakenduste jaoks liiga nõrgad ja kergesti purunevad ning näiteks on puutetundliku anduri jõu vahemik vaid 0,01 N w4x ja muud puutetundlikud andurid pole pakub MEMS-tehnoloogia. Allpool olev skeem näitab taktilise anduri ahelat.
Taktiilne andur robootikas
NASA robotites kasutatav puutetundlik andur on toodud allpool
- Üks näide, mis on otseselt seotud planeedi uurimisega.
- NASA kasutab neid andureid rahvusvahelises kosmosejaamas inimeste abistamiseks keskkonna parandamisel / hooldamisel
- NASA on robootikas proovinud paljusid kombatavaid andureid, mis on alles algstaadiumis. Nad on kasutanud Jõutundlik takisti ja nüüd on kasutusel kvanttunneliga komposiidid
- Tööstusrobot toodab taktiliste andurite väljatöötamiseks mitu laadimisnuppu ja lahtrit
Taktsioonianduri rakendused
Puudutage andurirakendused kasutatakse
- Robootika
- Arvutiriistvara
- Turvasüsteem
- Puuteekraan mobiiltelefoni seadmeid
- Arvutamine
Taktiilse anduri eelised
Taktiilse anduri eelised on toodud allpool:
- Need pakuvad hõlpsasti kasutatavaid kombatavate andurite lahendusi
- Taktsioonianduril pole väliseid komponente ja kaableid
- Kompaktne ekstraheerimine
- Robootika tõestatud puutetundlik tehnoloogia.
See puudutab puutetundliku anduri tööpõhimõtet ja rakendusi. loodame, et antud teave on abiks hea teabe ja projekti mõistmisel. Lisaks, kui teil on selle kontseptsiooni kohta mingeid küsimusi elektri- ja elektroonikaprojektid , saate kommenteerida allpool jaotises. Siin on teile küsimus - millised on puutetundlike andurite funktsioonid?
Foto autorid:
- Taktiilne andur ruutruum
- Jõu / pöördemomendi andur anduritehnika
- Dünaamiline andur vernier
- Termoandur pildid-amazon







{kind=link}
{kind=link}
{kind=link}