
Tänapäeval on robootika tehnoloogia valdkonnas üks arenenumaid. The robootika rakendused peamiselt seotud autode, meditsiini, ehituse, kaitse ja kasutatakse ka a tuletõrjerobot aidata inimesi tuleõnnetuses. Kuid roboti juhtimine puldi või lülitiga on üsna keeruline. Niisiis töötatakse välja uus projekt, see tähendab kiirendusmõõturil põhinev žestide juhtimise robot. Selle projekti peamine eesmärk on kiirendusmõõturi abil juhtida roboti liikumist käeliigutusega.

Kiirendusmõõturil põhinev žestikontrolli robot
Kiirendusmõõturil põhinev žestikontrolli robot
See projekt hõlmab saatja ja vastuvõtja osa. The vajalikud komponendid selle projekti ehitamiseks on Ht12e, Ht12d, L293D, AT89S52, 7805, kondensaator, kristall, PBT-pistik, ühepooluseline antenn, takisti, LED, kiirendusmõõtur ja aku. Kiirendusmõõtur on selle projekti oluline seade.
kiirendusmõõtur või saatja seade sõltub käeliigutusest. Saatja seadme kaudu võetakse vastu käsk ja seda töödeldakse mikrokontrolleri At89S51 abil. See mikrokontroller annab signaal robotile eelistatud suunas liikumiseks. Selle roboti põhiline tööpõhimõte on seadme näidude edastamise robotisse paigaldatud mikrokontrollerile andmesignaalide komplekt. Eelprogrammeeritud mikrokontroller töötab vastavalt programmile, mis panevad roboti vastavalt tööle.
Kiirendusmõõturit kasutav žestiga juhitav robot on üht tüüpi robot, mida saab käe liigutades juhtida, pannes sellele kiirendusmõõturi. See projekt on jagatud kaheks osaks saatja ja vastuvõtja. Kui žestiseade töötab saatjana ja robot töötab vastuvõtjaseadmena. Kui käele pannakse edastav seade (kiirendusmõõtur), saadab see robotile vajalike toimingute jaoks signaale.
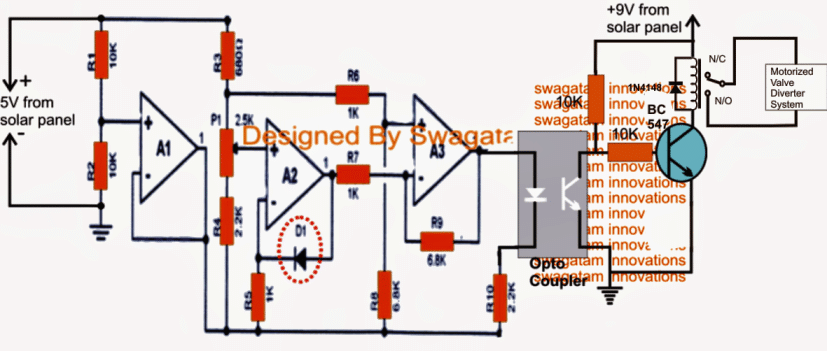
Peamised komponendid, mida edastavas osas kasutatakse, on kiirendusmõõtur, komparaator, HT12E IC kooder ja RF-saatja .
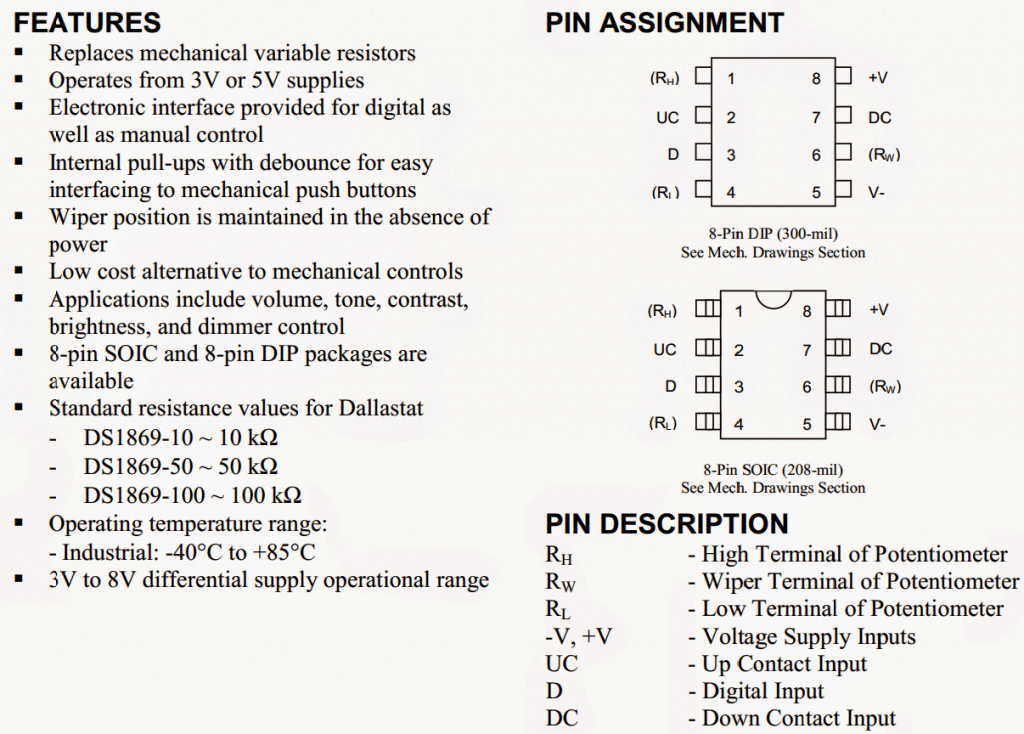
Kiirendusmõõtur
Kiirendusmõõtur on üks anduri tüüp ja see annab analoogandmed, liikudes X, Y ja Z suunas. Need suunad sõltuvad anduri tüübist. Kiirendusmõõturi skeem on toodud allpool. See andur koosneb noolte suundadest. Kui me kallutame andurit ühes suunas, siis konkreetse tihvti andmed muutuvad analoogina. Kiirendusmõõtur koosneb kuuest tihvtist, kus iga tihvti funktsioon käsitletakse allpool.

Kiirendusmõõtur
- Pin-1: VDD tihvti kasutatakse selleks, et anda sellele tihvtile + 5 V toiteallikat
- Pin-2: GND-tihvt on kallutamise eesmärgil ühendatud maapinnaga
- Pin-3: X pin võtab andmed vastu X suunas
- Pin-4: Y-tihvt võtab andmed vastu Y-suunas
- Pin-5: Z-tihvt võtab andmed vastu Z-suunas
- Pin-6: ST-tihvti kasutatakse kiirendusmõõturi tundlikkuse reguleerimiseks 1,5 g või 2 g või 3 g või 4 g
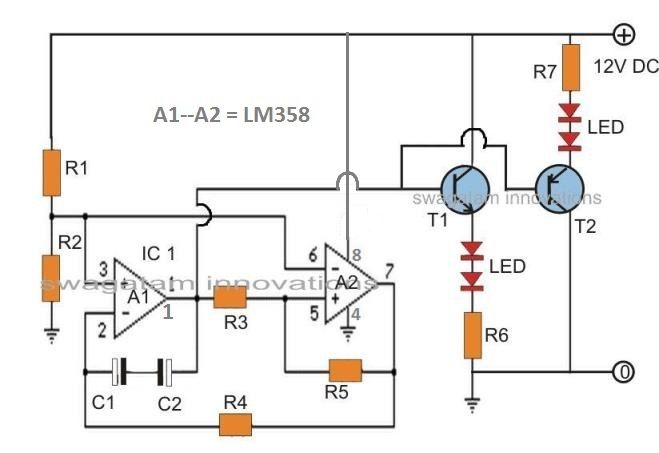
Võrdleja
Võrdlejat kasutatakse analoogpinge muutmiseks digitaalpingeks ja võrreldakse seda analoogpinge etalonpingega ning antakse täpne madal- või kõrgepinge
Kodeerija
Seda kooderit kasutatakse 4-bitiste andmete kodeerimiseks ja edastamiseks RF-saatja mooduli abil.
RF-saatja moodul
RF TX moodul töötab 433MHz sagedusega ja see moodul on turul madalate kuludega hõlpsasti kättesaadav
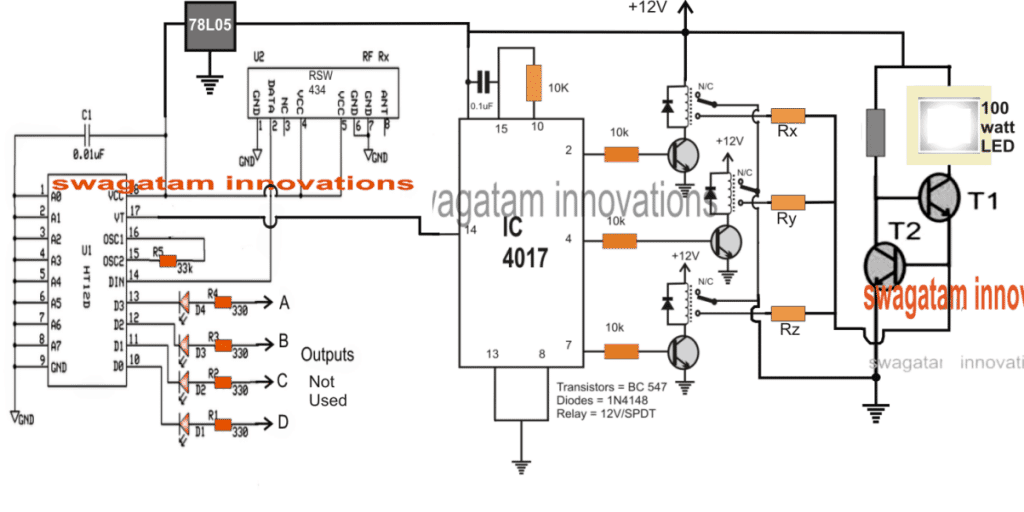
Peamised vastuvõtvas sektsioonis kasutatavad komponendid hõlmavad vastuvõtjat, dekoodrit, mikrokontrollerit ja mootorijuhti.

Saatja sektsioon
RF vastuvõtja
Selle projekti raadiovastuvõtja võtab vastu andmed, mida edastav seade edastab.
Dekooder
Dekoodrit kasutatakse seeriandmete muutmiseks paralleelseteks andmeteks, mis võetakse vastu RF-vastuvõtja moodulilt.
Mikrokontroller
The mikrokontroller on kõige olulisem osa roboti. Otsuses võimekuse andmiseks kasutatakse ahelas perekonna 8051 mikrokontrollerit
Mootorijuht
Mootorijuht on seade, mis annab liikumise sellise ülesande täitmiseks nagu mootor. Nii et me nõuame mootori juhilt nende juhtimist kontrolleri kaudu. Mootori ja mikrokontrolleri vahelise liidese saab teha selles vooluringis L293D mootori draiveri IC abil.
Vastuvõtjaosas võtab RF-vastuvõtja moodul andmeid vastu saatjalt. Vastuvõetud andmeid saab dekodeerida IC HT12D abil. Saadud andmeid saab töödelda mikrokontrolleri AT89S51 abil ja mootori juhtimiseks kasutatakse mootori draiverit.

Vastuvõtja sektsioon
Žestikontrolli robot töötab
Kiirendusmõõturil põhinev žestiga juhitav robot liigub vastavalt käeliigutusele, kui asetame kiirendusmõõturi teie käele. Kui kallutame kätt kiirendusmõõturiga roboti ette, siis hakkab robot edasi liikuma, kuni antakse järgmine liigutus. Kui me kallutame kätt tahapoole, siis robot muudab oma suunda ja olekut. Siis hakkab see liikuma tahapoole, kuni antakse järgmine signaal. Kui kallutame kätt vasakule küljele, liigub robot vasakule, kuni antakse järgmine signaal. Samamoodi liigub robot paremale küljele, kui kallutame kätt paremale küljele.
Rakendused
The kiirendusmõõturi rakendused põhinevad žestiga juhitavad robotid
- Neid roboteid kasutatakse sõjalistes rakendustes robotite käitamiseks
- Neid roboteid kasutatakse meditsiinilistes rakendustes operatsiooni eesmärgil
- Neid robootikaid kasutatakse ehitusvaldkonnas
- Seda robootikat kasutatakse tööstuses trolli ja tõstmise juhtimiseks.
Seega on see kõik kiirendusmõõturil põhineva žestijuhtimisroboti, selle töö ja rakenduste kohta. Loodame, et olete sellest kontseptsioonist paremini aru saanud. Lisaks sellele on selle kontseptsiooni osas kahtlusi või elektroonika projektid , andke palun tagasisidet, kommenteerides allolevas kommentaaride jaotises. Siin on teile küsimus, millised on kiirendusmõõturil põhineva žestikontrolliroboti rakendused?
Foto autorid:
- Kiirendusmõõturil põhinev žestikontrolli robot ytimg
- Kiirendusmõõtur staatiline.flickr






![IC 4060 kinnitusprobleem [lahendatud]](https://electronics.jf-parede.pt/img/timer-delay-relay/35/ic-4060-latching-problem.jpg)

{kind=link}
{kind=link}