Servomootorid on iseseisvad mehaanilised seadmed, mida kasutatakse masinate juhtimiseks väga täpselt. Neid leidub paljudes rakendustes alates mänguasjadest kuni tööstusautomaatikani. Mootoreid on mitmesuguseid, kuid servomootorid on spetsiaalselt ette nähtud masinate juhtimiseks konkreetse nurgaasendi jaoks. Tavaliselt kasutatakse servomootorit nurga liikumise juhtimiseks vahemikus 0 ° kuni 180 ° ja 0 ° kuni 90 °. The servomootori tööpõhimõte põhineb PWM-il ( impulsi laiuse modulatsioon ) impulsid.

Servomootor
Servomootori liidestamine mikrokontrolleriga 8051
Servomootor on täpse nurkliikumise jaoks kõige sagedamini kasutatav mootor. Servomootori kasutamise eeliseks on see, et mootori nurgaasendit saab juhtida ilma igasuguse tagasisidemehhanismita. Servomootoreid kasutatakse tavaliselt aastal äri- ja tööstusrakendused . Neid kasutatakse ka laialdaselt nagu ajamisüsteemides nagu robotid, lennukid jne.

Servomootori liidestamine mikrokontrolleriga 8051
Hobby servomootori tööpõhimõte ja töö on väga lihtne, see koosnes kolmest juhtmest, kus neist kahte (must ja punane) kasutati voolu andmiseks ja kolmandat traati juhtsignaali edastamiseks. Pulssilaiuse moduleeritud (PWM) laineid kasutatakse juhtimissignaalidena ja nurgaasend on kindel pulsi laiuse järgi juhtimissisendis. Selles artiklis kasutame servomootorit, mille pöördenurk on 0–180 ° ja nurga asendit saab juhtida, muutes töötsükleid vahemikus 1–2 ms.
Siin servomootor liides 8051 mikrokontroller , maandustihvtiga ühendatud must juhe ja mootor saavad toite punasest juhtmest. 8051 mikrokontrolleri servomootoriga ühendatud pordi 0 juhtimine. 11,0592 MHz kristall-ostsillaatorit kasutatakse mikrokontrollerisse impulsseeriva kella ja 22pf keraamiliste kondensaatorite saamiseks, mida kasutatakse kristalli töö stabiliseerimiseks. Mikrokontrolleri lähtestamise toite saamiseks kasutatakse 10KΩ ja 10uf kondensaatorit.
Servomootori juhtimine nurga pöörlemisega
Servomootori tööpõhimõte sõltub peamiselt töötsüklitest. See kasutab kontrollsignaalidena pulsilaiuse moduleeritud (PWM) laineid. Pöördenurk lahutatakse juhtnõela impulsi laiuse järgi. Servomootor, mida kasutatakse pöördenurgaks 0 kuni 180 kraadi. Täpset nurga asukohta saame kontrollida, muutes impulsi vahemikus 1 ms kuni 2 ms.

Nurga pöörlemisega servomootori juhtimine
Servomootori programmeerimine nurkpöördega
# kaasata
Sbit servomootor_pin = P0 ^ 5
Tühine viivitus (allkirjastamata int)
Tühista servo_delay (allkirjastamata int)
Tühista peamine ()
{
Servomootori tihvt = 0x00
Tehke
{
// pöörake 0 ° -le
Servomootori_nupp = 0x01
Sevo_delay (50)
Servomootori tihvt = 0x00
Viivitus (1000)
// pöörata 90 kraadini
Servomootori_nupp = 0x01
Sevo_delay (82)
Servomootori tihvt = 0x00
Viivitus (1000)
// pöörata 180 kraadini
Servomootori_nupp = 0x01
Sevo_delay (110)
Servomootori tihvt = 0x00
Viivitus (1000)
Kuigi (1)
}
}
Tühine viivitus (allkirjastamata int a)
{
Allkirjastamata int lk
Sest (p = 0p
}
Tühista servo_delay (allkirjastamata int a)
{
Allkirjastamata int lk
Sest (p = 0p
}
Servomootori tööpõhimõte
Servomootori tööpõhimõte sõltub peamiselt Flemingi vasaku käe reeglist. Põhimõtteliselt on servomootorid kohandatud Alalisvoolumootorid , asendiandur, käigu reduktor ja elektrooniline vooluahel. Alalisvoolumootorid töötavad akult ning töötavad suure kiiruse ja väikese pöördemomendiga. Me panime alalisvoolumootoritega ühendatud võlli ja hammasratta kokku, et saaksime mootori kiirust järk-järgult suurendada ja vähendada.
Asendiandur tajub võlli asukohta fikseeritud asendist ja saadab teabe juhtimisahelasse. Juhtimisahel dekodeerib vastavalt asukohasensorilt saadud signaalid ja võrdleb mootorite tegelikku asukohta eelistatud asendiga ning vastavalt juhib alalisvoolumootori pöörlemissuunda, et saada vajalik asend. Üldiselt vajab servomootor 4,8–6 V alalisvoolu.
Servomootori juhtimine jadapordi käskude abil
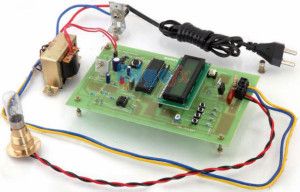
Selle projekti peamine eesmärk on juhtida servomootorit personaalarvuti abil. See vajab mikrokontrolleri ja jadasisendi sisendliini, personaalarvuti jadapordist, ühte juhtimisliini, et käsklusi ahelasse saata. Ajastusallika annab kristall-ostsillaator. Disainitud servomootori vooluahel, mis on ühendatud jadakaabli ja nivoorihutiga arvutiga, avage seejärel arvuti 'Hyper Terminal' tarkvara, et valida arvuti kompuuter.

Servomootori juhtimine jadapordi käskude abil
Kui käsklused on personaalarvutist (PC) hüperterminali kaudu nihutajaga saadetud mikrokontrollerile, saadakse mikrokontroller need andmed ja võrreldakse neid eelnevalt määratletud andmetega ning genereeritakse vastavad signaalid, et aktiveerida mootori draiver seda juhtima. soovitud kiirus. Palju mikrokontrolleri projektid välja töötatud servomootori põhjal, nagu tasakaalustusrobotid, raja helikopterid ja nii edasi. Saame servomootorit kasutada turvalisuse tagamiseks, ühendudes traadita kaameraga, kuna saame juhtida kaamera 360 kõrvalekaldumist.
Ise tasakaalustav robot
Isetasakaalustuv robot on võimeline end tasakaalustama servomootorite abil. See robot on koos konstruktsiooniliste, mehaaniliste ja elektrooniliste komponentidega kokku pannud, mis annab nähtavalt tasakaalustamata platvormi, mis on väga kohandatud ühe joone alla kallutamiseks. Roboti rattad on võimelised iseseisvalt pöörlema kahel viisil, mida juhib servomootor. Teavet seadme nurga kohta maapinna suhtes saab aadressilt kallutusandurid seadmes.

Ise tasakaalustav robot
Kallutusandur võib olla kiirendusmõõtur, güroskoopiline andur või IR-andur (maapinna mõõtmiseks). Andurid saadavad teavet juhtplokile, mis töötleb tagasisidet põhilise proportsionaalse, integraalse, tuletise (PID) algoritmi abil, et tekitada servomootoritele kompenseerivad asendi juhtimissignaalid seadme tasakaalustamiseks.
Servomootori rakendused
- Seda kasutatakse pressimasinates tükkide suuruse lõikamiseks
- Seda kasutatakse suhkru tanklas
- Seda kasutatakse märgistamisrakendustes
- Seda kasutatakse juhusliku ajastuse funktsiooniga pakkimissüsteemi
- Seda kasutatakse Kasutatakse lennukites
Servomootori eelised
- Kui mootor saab rasket koormust, suurendab juht mootori pöörlemisel mootori mähise voolu. Peamiselt puudub etapiväline tingimus.
- Servomootorite abil on võimalik töötada kiiresti.
See kõik puudutab servomootori tööpõhimõtet ja ühenduses 8051 mikrokontrolleriga . Lisaks sellele selle artikliga seotud tehnilise abi saamiseks elektroonika projektid mis on loodud selliste liideseseadmete abil nagu RTC, OLED, välkmälu, kohandatud LCD-ekraan, puutetundliku ekraaniga ekraanid jne. Võite pöörduda meie poole, andes oma kommentaarid allpool olevas kommentaaride jaotises.