Postitus käsitleb ühefaasilist muutuva sagedusega ajami ahelat või VFD-vooluahelat vahelduvvoolumootori kiiruse juhtimiseks, mõjutamata nende tööparameetreid.
Mis on VFD
Mootorid ja muud sarnased induktiivkoormused eriti ei meeldi töötada sagedustel, mis ei pruugi olla nende tootmistingimuste piires, ning kipuvad sellistes ebanormaalsetes tingimustes palju ebaefektiivseks.
Näiteks ei tohi 60Hz töötamiseks määratud mootorit soovitada töötada sagedustel 50 Hz või muudes vahemikes.
See võib anda soovimatuid tulemusi, näiteks mootori kuumenemine, nõutavatest pöörlemiskiirustest madalam või suurem ning ebatavaliselt suur tarbimine, mis muudab asja väga ebaefektiivseks ja väiksema ühendatud seadme eluea halvenemise.
Mootorite töötamine erinevates sisendsagedustingimustes muutub sageli sunniks ja sellistes olukordades võib VFD või muutuva sagedusega ajamahel olla väga mugav.
VFD on seade, mis võimaldab kasutajal juhtida vahelduvvoolumootori kiirust, reguleerides sisendtoite sagedust ja pinget vastavalt mootori spetsifikatsioonidele.
See tähendab ka seda, et VFD võimaldab meil töötada mis tahes vahelduvvoolumootoriga mis tahes saadaoleva võrgu vahelduvvooluallika kaudu, hoolimata selle pingest ja sagedusest, kohandades VFD sagedust ja pinget vastavalt mootori spetsifikatsioonidele.
Tavaliselt kasutatakse selleks antud juhtnuppu erineva sageduse kalibreerimisega skaleeritud muutuva nupu kujul.
Koduse VFD-i valmistamine võib tunduda keeruline ettepanek, kuid pilk allpool soovitatud kujundusele näitab, et lõppude lõpuks pole selle väga kasuliku seadme (minu loodud) ehitamine nii keeruline.
Ahela töö
Vooluringi saab põhimõtteliselt jagada kaheks etapiks: pooleldi autojuhi etapp ja PWM-i loogikageneraatori etapp.
Poolsillajuhi etapis kasutatakse poolsillajuhti IC IR2110, mis hoolitseb üksinda kõrgepinge mootori ajamisastme eest, mis sisaldab vastavalt kahte kõrget ja madalat külgmist mosfetti.
Juhi IC moodustab seega vooluahela südamiku, kuid vajab selle üliolulise funktsiooni rakendamiseks vaid mõnda komponenti.
Ülaltoodud IC vajaks ühendatud koormuse juhtimiseks soovitud spetsiifilisel sagedusel aga kõrget loogikat ja sageduste madalat loogikat.
Need hi ja lo sisendsignaalid muutuvad draiveri IC tööandmeteks ja peavad sisaldama signaale kindlaksmääratud sageduse määramiseks, samuti PWM-e, mis on faasis võrgu vahelduvvooluga.
Ülaltoodud teabe loob teine etapp, mis koosneb paarist 555 IC-st ja kümnendi loendurist. IC 4017.
Kaks 555 IC-d vastutavad modifitseeritud siinuslaine PWM-ide genereerimise eest, mis vastavad täislaine vahelduvvoolu proovile, mis on tuletatud astmelise alaldi alaldi väljundist.
IC4017 toimib totempooluse väljundloogika generaatorina, mille vahelduv sagedus muutub vooluahela peamiseks sageduse määramise parameetriks.
See määrav sagedus noppitakse IC1 tihvtist nr 3, mis toidab ka IC2 käivitusnõela välja ja modifitseeritud PWM-ide loomiseks IC2 tihvti nr 3 juures.
Modifitseeritud siinuslaine PWM-id skannitakse enne IR2110 söötmist 4017 IC väljundites, et modifitseeritud PWM-ide täpne 'print' asetada poolsillajuhi väljundisse ja lõpuks töötava mootori külge.
Cx ja 180k poti väärtused tuleks vastavalt valida või reguleerida, et tagada mootori õige täpsustatud sagedus.
Kõrge külgmise mosfeti äravoolu kõrgepinge tuleb samuti asjakohaselt arvutada ja tuletada olemasoleva võrgupinge vahelduvvoolu parandamise teel pärast selle sobivat suurendamist või vähendamist vastavalt mootori spetsifikatsioonidele.
Ülaltoodud seadistused määravad konkreetse mootori jaoks õige volti hertside (V / Hz) kohta.
Mõlema astme toitepinge saab muuta ühiseks jooneks, mis on sama maaühenduse jaoks.
TR1 on astmeline 0–12 V / 100 mA trafo, mis varustab ahelaid vajaliku tööpinge abil.
PWM-i kontrolleri vooluring

Peate integreerima ülaltoodud skeemi IC 4017 väljundid vastavalt järgmise diagrammi HIN ja LIN sisenditele. Samuti ühendage ülaltoodud diagrammil näidatud 1N4148 dioodid madalate külgedega MOSFET-väravatega, nagu on näidatud allpool oleval skeemil.
Full Bridge mootori juht

Uuendus:

Eespool käsitletud lihtsat ühe VFD disaini saab veelgi lihtsustada ja täiendada, kasutades iseenesest võnkuvat täissilda IC IRS2453, nagu allpool näidatud:
Siin on IC 4017 täielikult kõrvaldatud, kuna täissilla juht on varustatud oma ostsillaatori astmega ja seetõttu pole selle IC jaoks vaja välist käivitamist.
Kuna tegemist on täieliku silla konstruktsiooniga, on mootori väljundjuhtimisel täielik reguleerimine nullist kuni maksimaalse kiiruseni.
IC 2 tihvti nr 5 potti saab kasutada mootori kiiruse ja pöördemomendi reguleerimiseks PWM-meetodil.
V / Hz kiiruse reguleerimiseks saab IRS2453-ga seotud Rt / Ct ja IC1-ga seotud R1 vastavalt (käsitsi) vastavate tulemuste saamiseks kohandada.
Veelgi lihtsustamine

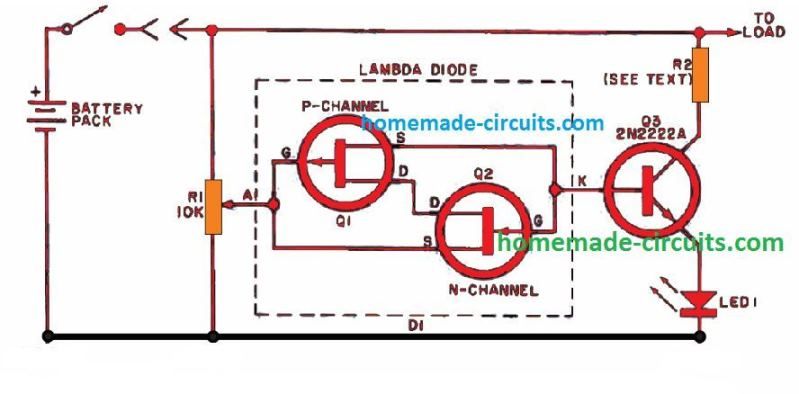
Kui leiate, et kogu sillaosa on valdav, võite selle asendada P, N-MOSFET-põhise täis silla ahelaga, nagu allpool näidatud. See muutuva sagedusega draiver kasutab sama kontseptsiooni, välja arvatud täissilla draiveri sektsioon, mis kasutab kõrgel küljel P-kanaliga MOSFET-i ja madalal N-kanaliga MOSFET-i.
Kuigi konfiguratsioon võib P-kanaliga MOSFET-ide kaasamise tõttu tunduda ebaefektiivne (nende kõrge RDSon-hinnangu tõttu), võib paljude paralleelsete P-MOSFET-ide kasutamine tunduda efektiivne lähenemine madala RDSon-probleemi lahendamisel.
Siin kasutatakse P-kanaliga seadmete jaoks paralleelselt 3 MOSFET-i, et tagada seadmete minimaalne kuumutamine, võrdselt N-kanaliga analoogidega.
Eelmine: Kuidas kaitsta MOSFET-e - selgitatud põhitõdesid Järgmine: Päikese MPPT rakenduste I / V jälgimisahel