Andurid on seadmed, mida kasutatakse keskkonnast erinevat tüüpi füüsikaliste suuruste tuvastamiseks või tajumiseks. Sisendiks võib olla valgus, soojus, liikumine, niiskus, rõhk, vibratsioon jne. .Toodud väljund on tavaliselt rakendatud sisendiga proportsionaalne elektrisignaal. Seda väljundit kasutatakse sisendi kalibreerimiseks või väljundsignaali edastamiseks võrgu kaudu edasiseks töötlemiseks. Mõõdetava sisendi põhjal on erinevaid andureid. Merkuuril põhinev termomeeter toimib a temperatuuriandur autode hapnikusensor tuvastab hapniku, fotosensor tuvastab nähtava valguse olemasolu. Selles artiklis kirjeldaksime järgmist piesoelektriline andur . Selle kohta lisateabe saamiseks vaadake linki piesoelektriline efekt .
Piesoelektrilise anduri määratlus
Andur, mis töötab põhimõttel piesoelektrilisus on tuntud piesoelektrilise andurina. Kus piesoelektrienergia on nähtus, kus tekib elekter kui materjalile rakendatakse mehaanilist pinget. Kõigil materjalidel pole piesoelektrilisi omadusi.

Piesoelektriline andur
Piesoelektrilisi materjale on erinevaid. Näited piesoelektrilised materjalid on looduslikult saadaval monokristallkvarts, luu jne ... Kunstlikult valmistatud nagu PZT keraamika jne ...
Piesoelektrilise anduri töö
Piesoelektrilise anduri poolt tavaliselt mõõdetud füüsikalised suurused on kiirendus ja rõhk. Nii rõhu- kui ka kiirendusandurid töötavad samal piesoelektri põhimõttel, kuid peamine erinevus nende vahel on viis, kuidas nende sensori elemendile jõudu rakendatakse.
Rõhuanduris asetatakse massiivsele alusele õhuke membraan rakendatud jõu ülekandmiseks piesoelektriline element . Sellele õhukesele membraanile surve avaldamisel laaditakse piesoelektriline materjal ja see hakkab tekitama elektrilisi pingeid. Toodetud pinge on proportsionaalne rakendatava rõhu suurusega.
Sisse kiirendusmõõturid , seismiline mass kinnitatakse kristallelemendile rakendatud jõu ülekandmiseks piesoelektrilistele materjalidele. Liikumise rakendamisel on seismiline massikoormus piesoelektriline materjal vastavalt Newtoni teine seadus liikumisest. Piesoelektriline materjal tekitab liikumise kalibreerimiseks kasutatava laengu.
Kiirenduse kompenseerimise elementi kasutatakse koos a rõhuandur kuna need andurid saavad kätte soovimatu vibratsiooni ja näitavad valenäite.
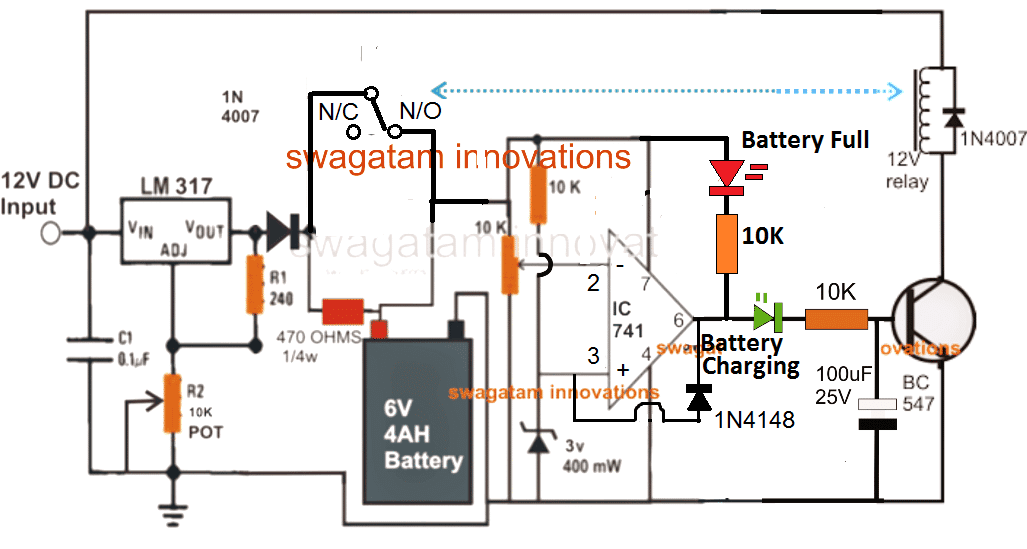
Piesoelektrilise anduri ahel
Eespool on toodud piesoelektrilise anduri sisemine vooluring. Takistus Ri on sisetakistus ehk isolaatori takistus. Induktiivsus on tingitud inertsist andur . Mahtuvus Ce on pöördvõrdeline andurimaterjali elastsusega. Anduri õigeks reageerimiseks peab koormus- ja lekketakistus olema piisavalt suur, et madalad sagedused säiliksid. Andurit võib nimetada rõhuks andur elektrisignaalis. Andureid tuntakse ka kui primaarandureid.

Piesoelektriline andur
Piesoelektriliste andurite spetsifikatsioonid
Mõned piesoelektriliste andurite põhiomadused on
- Mõõtepiirkond: Selle vahemiku suhtes kehtivad mõõtepiirid.
- Tundlikkus S: Väljundsignaali ∆y muutuse suhe muutuse causedx põhjustanud signaalini.
S = ∆y / ∆x. - Usaldusväärsus: See arvestab andurite võimet hoida omadusi teatud piirides määratud töötingimustel.
- Tundlikkus S: Väljundsignaali ∆y muutuse suhe muutuse causedx põhjustanud signaalini.
Lisaks sellele on mõned piesoelektriliste andurite spetsifikatsioonid reaktsioonilävi, vead, näitamise aeg jne.
- Nende andurite takistusväärtus on ≤500Ω.
- Need andurid töötavad tavaliselt temperatuurivahemikus umbes -20 ° C kuni + 60 ° C.
- Neid andureid tuleb hoida lagunemise vältimiseks temperatuuril vahemikus -30 ° C kuni + 70 ° C.
- Need andurid on väga madalad Jootmine temperatuur.
- Piesoelektrilise anduri pingetundlikkus on 5 V / µƐ.
- Kvarts on oma suure paindlikkuse tõttu piesoelektrilise andurina kõige eelistatum materjal.
Arduino abil töötav piesoelektriline andur
Kuna peame teadma, mis on piesoelektriline andur, vaatame selle anduri lihtsat rakendust Arduino abil. Siin proovime lülitada LED-i, kui rõhuandur tuvastab piisavalt jõudu.
Vajalik riistvara
- Arduino tahvel .
- Piesoelektriline rõhuandur.
- LED
- 1 MΩ takisti.
Vooluahela skeem:
- Siin on punase juhtmega tähistatud anduri positiivne juhe ühendatud Arduino plaadi A0 analoognõelaga, samas kui musta juhtmega tähistatud negatiivne juhe on ühendatud maandusega.
- Piesoelektrilise elemendi tekitatava pinge ja voolu piiramiseks ning analoogsisendi kaitsmiseks soovimatute vibratsioonide eest on piesoelementiga paralleelselt ühendatud 1 MΩ takisti.
- LED-anood on ühendatud Arduino digitaalse tihvtiga D13 ja katood on ühendatud maapinnaga.

Vooluringi skeem
Töötab
Vooluahelale seatakse läviväärtus 100, nii et andurit ei aktiveerita lävest väiksema vibratsiooni korral. Selle abil saame kõrvaldada soovimatud väikesed vibratsioonid. Kui andurielemendi genereeritud väljundpinge on suurem kui läviväärtus, muudab LED oma olekut, st kui see on KÕRGES olekus, läheb LOW. Kui väärtus on läviväärtusest madalam, ei muuda LED olekut ja jääb eelmisesse olekusse.
Kood
konst int ledPin = 13 // digitaalse tihvtiga 13 ühendatud LED
konst int Andur = A0 // Andur on ühendatud analoog tihvtiga A0
konst int lävi = 100 // Läveks on seatud 100
int sensorReading = 0 // muutuja anduri tihvtilt loetud väärtuse salvestamiseks
int ledState = MADAL // muutuja, mida kasutatakse viimase LED-oleku salvestamiseks, valguse vahetamiseks
kehtetu seadistamine ()
{
pinMode (ledPin, OUTPUT) // deklareerige ledPin väljundina
}
void loop ()
{
// lugege andurit ja salvestage see muutuvas anduris
sensorReading = analogRead (andur)
// kui anduri näit on suurem kui künnis:
if (sensorReading> = lävi)
{
// vahetab ledPini olekut:
ledState =! ledState
// värskendage LED-tihvti:
digitalWrite (ledPin, ledState)
viivitus (10000) // viivitus
}
muud
{
digitalWrite (ledPin, ledState) // LED-i algseisund, st LOW.
}
}
Piesoelektriliste andurite rakendused
- Selleks kasutatakse piesoelektrilisi andureid šoki tuvastamine .
- Paksusemõõturi, vooluanduri jaoks kasutatakse aktiivseid piesoelektrilisi andureid.
- Passiivseid piesoelektrilisi andureid kasutatakse mikrofonides, kiirendusmõõturites, muusikalistes helitugevustes jne.
- Ultraheli pildistamiseks kasutatakse ka piesoelektrilisi andureid.
- Neid andureid kasutatakse optiliste mõõtmiste, mikro-liikuvate mõõtmiste, elektroakustika jne jaoks.
Seega on see kõik selle kohta, mis on a piesoelektriline andur , omadused, spetsifikatsioonid ja ka anduri lihtne liides Arduino plaadi abil. Need lihtsalt kasutatavad andurid leiavad koha erinevates rakendustes. Kuidas olete neid andureid oma projektis kasutanud? Mis oli suurim väljakutse, mis teil nende andurite kasutamisel tekkis?