
1960. aastal leiutati laservalgus ja pärast laserite leiutamist olid teadlased üles näidanud huvi uurida kiudoptiliste sidesüsteemide rakendusi sensatsiooni, andmeside ja paljude muude rakenduste jaoks. Seejärel fiiberoptiline sidesüsteem on muutunud ülimaks valikuks gigabittide ja gigabitite piires andmete edastamisel. Seda tüüpi kiudoptilist sidet kasutatakse andmete, kõne, telemeetria ja video edastamiseks kaugside- või arvutivõrkude või kohtvõrkude kaudu. See tehnoloogia kasutab andmete edastamiseks kiudude abil valguslainet, muutes elektroonilised signaalid valguseks. Selle tehnoloogia suurepäraste iseloomulike tunnuste hulka kuuluvad kerge kaal, madal summutus, väiksem läbimõõt, kaugsignaali edastamine, edastuse turvalisus ja nii edasi.

Kiudoptilised andurid
On märkimisväärne, et telekommunikatsioonitehnoloogia on muutnud kiudoptilise tehnoloogia hiljutisi edusamme. Viimane revolutsioon ilmus disaineritena, et ühendada selle produktiivsed tulemused optoelektroonilised seadmed fiiberoptiliste telekommunikatsiooniseadmetega fiiberoptiliste andurite loomiseks. Paljud nende seadmetega seotud komponendid on sageli välja töötatud kiudoptiliste andurite jaoks. Kiudoptiliste andurite võime on traditsioonilise anduri asemel suurenenud.
Kiudoptilised andurid
Kiudoptilised andurid, mida nimetatakse ka optiliste kiudude anduriteks, kasutavad optilist kiudu või sensorit. Neid andureid kasutatakse teatud koguste, näiteks temperatuuri, rõhu, vibratsiooni, nihkumiste, pöörlemiste või keemiliste ainete kontsentratsiooni tajumiseks. Kiududel on kaugseire valdkonnas nii palju kasutusalasid, kuna need ei vaja kaugel asuvas kohas elektrit ja nende suurus on väike.
Kiudoptilised andurid on ülitundlikud tundetute tingimuste korral, sealhulgas müra, kõrge vibratsioon, äärmine kuumus, märg ja ebastabiilne keskkond. Need andurid mahuvad kergesti väikestesse piirkondadesse ja neid saab õigesti paigutada kõikjal, kus on vaja painduvaid kiude. Lainepikkuse nihet saab arvutada seadme, optilise sageduse ja domeeni peegeldusmeetri abil. Kiudoptiliste andurite viivituse saab otsustada sellise seadme abil nagu optiline ajadomeeniga reflektomeeter.

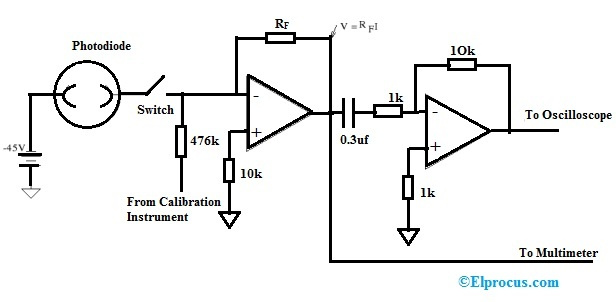
Kiudoptilise anduri plokkskeem
Kiudoptilise anduri üldine plokkskeem on toodud ülal. Plokkdiagramm koosneb optilisest allikast ( Valgusdiood , LASER ja laserdiood), optiline kiud, sensorielement, optiline detektor ja lõpptöötlusseadmed (optilise spektri analüsaator, ostsilloskoop). Need andurid on jaotatud kolme kategooriasse, lähtudes tööpõhimõtetest, anduri asukohast ja rakendusest.
Kiudoptiliste andurisüsteemide tüübid
Neid andureid saab klassifitseerida ja selgitada järgmiselt:
1. Sensori asukoha järgi klassifitseeritakse fiiberoptilised andurid kahte tüüpi:
- Sisemised kiudoptilised andurid
- Väline kiudoptiline andur
Sisemised kiudoptilised andurid
Seda tüüpi andurites toimub tajumine kiu enda sees. Andurid sõltuvad optilise kiu enda omadustest, muutes keskkonnategude a modulatsioon seda läbivast valgusvihust. Siin võib valgusignaali üks füüsikalisi omadusi esineda sageduse, faasi, polarisatsiooni intensiivsuse kujul. Sisemise fiiberoptilise anduri kõige kasulikum omadus on see, et see võimaldab hajutatud tajumist pika vahemaa tagant. Sisemise kiudoptilise anduri põhimõiste on esitatud järgmisel joonisel.

Sisemised kiudoptilised andurid
Välist tüüpi kiudoptilised andurid
Välist tüüpi kiudoptilistes andurites võib kiudu kasutada infokandjatena, mis näitavad teed musta kasti juurde. See tekitab valgussignaali sõltuvalt musta kasti saabunud teabest. Must kast võib olla valmistatud peeglitest,gaas või muud optilist signaali tekitavad mehhanismid. Neid andureid kasutatakse pöörlemise, vibratsiooni kiiruse, nihke, keerdumise, pöördemomendi ja kiirenduse mõõtmiseks. Major nende andurite kasu on nende võime jõuda muidu kättesaamatutesse kohtadesse.

Välist tüüpi kiudoptilised andurid
Selle anduri parim näide on õhusõiduki reaktiivmootori sisetemperatuuri mõõtmine, mis kasutab kiudu kiirguse edastamiseks kiirguspüromeetrisse, mis asub väljaspool mootorit. Samamoodi saab neid andureid kasutada ka seadme sisetemperatuuri mõõtmiseks trafod . Need andurid kaitsevad mõõtesignaale suurepäraselt müra rikkumise eest. Järgmisel joonisel on kujutatud välise fiiberoptilise anduri põhimõiste.
2. Toimimispõhimõtete alusel jaotatakse fiiberoptilised andurid kolme tüüpi:
- Intensiivsusepõhine
- Faasipõhine
- Polarisatsioonipõhine
Intensiivpõhine kiudoptiline andur
Intensiivpõhised fiiberoptilised andurid vajavad rohkem valgust ja need andurid kasutavad mitmerežiimilisi suuri südamikiude. Joonisel toodud joonis annab ülevaate, kuidas valgustugevus toimib sensoorsete parameetritena ja kuidas see paigutus paneb kiud töötama vibratsiooniandur. Vibratsiooni korral toimub valguse muutus ühest otsast teise ja see muudab intelligentsuse vibratsiooni amplituudi mõõtmiseks.

Intensiivpõhine kiudoptiline andur
Joonisel sõltuvad lähemad fiiberoptilised ja vibratsiooniandurid hilisemate osade valgustugevusest. Nendel anduritel on süsteemis muutuvate kadude tõttu palju piiranguid, mida keskkonnas ei esine. Need muutuvkaod hõlmavad kaotusi ühenduste tõttu, mikro- ja makrokõverduste kaotusi, kaotusi ühenduste ühenduste tõttu jne. Näited hõlmavad intensiivsuspõhiseid andureid või mikrosuunalisi andureid ja haihtuvate lainete andureid.
Nende kiudoptiliste andurite eeliste hulka kuuluvad madal hind, võime toimida reaalsete hajutatud anduritena, väga lihtne rakendada, multipleksimise võimalus jne. Puudused hõlmavad valguse intensiivsuse erinevusi ja suhtelisi mõõtmisi jne.
Polarisatsioonipõhine fiiberoptiline andur
Polarisatsioonipõhised optilised kiud on teatud andurite klassi jaoks olulised. Seda omadust saab lihtsalt muuta erinevate väliste muutujate ja seega ka nende abil andurite tüübid saab kasutada mitmesuguste parameetrite mõõtmiseks.Täpsete polarisatsioonifunktsioonidega on välja töötatud spetsiaalsed kiud ja muud komponendid. Üldiselt kasutatakse neid mitmesugustes mõõtmistes, side- ja signaalitöötlusrakendustes.

Polarisatsioonipõhine fiiberoptiline andur
Polarisatsioonipõhise fiiberoptilise anduri optiline seadistus on näidatud ülal. See on kujundatud valgusallikast tuleneva valguse polariseerimisega läbi polarisaatori. Polariseeritud valgus käivitatakse valitud telgede suhtes 45 ° kahepoolse murdumisega kaitsva kiudude pikkusega telgede suhtes. Seda kiudosa kasutatakse sensoorseks kiuks. Seejärel muudetakse kahe polarisatsiooniseisundi faaside erinevust mis tahes väliste häirete, näiteks pinge või pinge korral. Siis vastavalt välistele häiretele muudetakse väljundi polarisatsiooni. Seega, kui arvestada väljundi polarisatsiooni olekut kiu järgmises otsas, saab tuvastada väliseid häireid.
Faasipõhine kiudoptiline andur
Seda tüüpi andureid kasutatakse emitteri valguse muutmiseks infosignaalil, kusjuures signaali jälgib faasipõhine fiiberoptiline andur. Kui valgusvihk viiakse läbi interferomeetri, siis eraldub valgus kaheks kiireks. Seal puutub üks valgus sensatsioonikeskkonda ja teine kiir on isoleeritud sensorkeskkonnast, mida kasutatakse võrdlusena. Kui kaks eraldatud kiirt on uuesti kokku ühendatud, siis saavad nad teineteisega teele. Kõige sagedamini kasutatakse interferomeetreid Michelson, Mach Zehnder, Sagnac, riiv- ja polarimeetrilised interferomeetrid. Siin on Mach Zehnderi ja Michelsoni interferomeetrid toodud allpool.

Faasipõhine kiudoptiline andur
siin on kahe interferomeetri erinevused ja sarnasused. Sarnasuse poolest peetakse Michelsoni interferomeetrit sageli kokkupandud Mach Zehnderi interferomeetriks. Michelsoni interferomeetri konfiguratsioon nõuab ainult ühte kiudoptilist sidurit. Kuna valgus läbib taju- ja võrdluskiude kaks korda, kahekordistub optiline faasinihe kiu pikkuse ühiku kohta. Seega võib Michelson olla tundlikult parem. Michelsoni teine selge eelis on see, et andurit saab küsida ainult ühe kiuga allika ja allika detektori mooduli vahel. Kuid Michelsoni interferomeetri jaoks on vaja kvaliteetset peegelpeeglit
3. Rakenduse põhjal klassifitseeritakse fiiberoptilised andurid kolme tüüpi, näiteks
- Keemiline andur
- Füüsiline andur
- Bio meditsiiniline andur
Keemiline andur
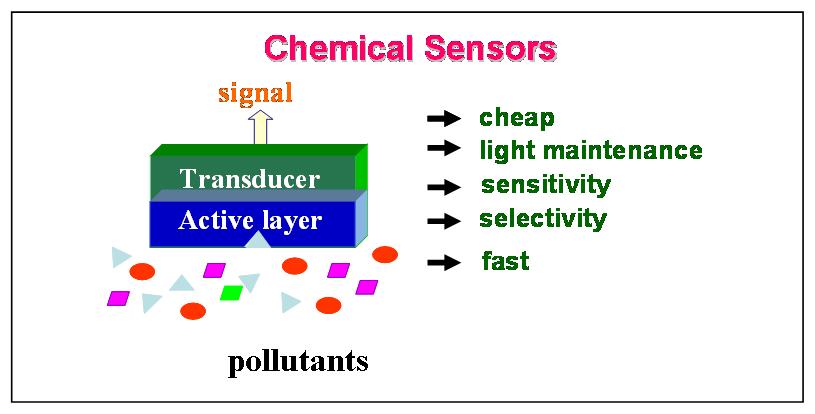
Keemiline andur on seade, mida kasutatakse keemilise teabe muundamiseks mõõdetava füüsikalise signaali kujul, mis on seotud teatud keemiliste liikide kontsentratsiooniga. Keemiline andur on analüsaatori oluline komponent ja võib sisaldada mõnda seadet, mis täidab järgmist funktsioonid: signaalitöötlus, proovivõtt ja andmetöötlus. Analüsaator võib olla automatiseeritud süsteemi oluline osa.

Keemiline andur
Analüsaatori töö vastavalt proovivõtuplaanile aja funktsioonina toimib monitorina. Need andurid sisaldavad kahte funktsionaalset üksust: retseptorit ja muundurit. Retseptoriosas muundatakse keemiline teave energiaks, mida muundur võib mõõta. Anduri osas muundatakse keemiline teave analüütiliseks signaaliks ja see ei näita tundlikkust.
Füüsiline andur
Füüsiline andur on seade, mis on valmistatud vastavalt füüsilisele mõjule ja olemusele. Neid andureid kasutatakse teabe edastamiseks süsteemi füüsikaliste omaduste kohta. Seda tüüpi andureid tähistavad enamasti sellised andurid nagu fotoelektrilised andurid, piesoelektrilised andurid , metalltakistusega deformatsiooniandurid ja pooljuht-piesotakistusega andurid.
Bio meditsiiniline andur
Biomeditsiiniline andur on elektrooniline seade, mida kasutatakse mitmesuguste mitteelektriliste suuruste ülekandmiseks biomeditsiiniväljades kergesti tuvastatavateks elektrilisteks suurusteks. Sel põhjusel kaasatakse need andurid tervishoiuanalüüsidesse. See sensatsioonitehnoloogia on võti inimese patoloogilise ja füsioloogilise teabe kogumiseks.

Bio meditsiiniline andur
Kiudoptiliste andurite rakendused
Kiudoptilisi andureid kasutatakse erinevates rakendustes, näiteks
- Füüsikaliste omaduste, näiteks temperatuuri, nihke mõõtmine,kiirus, deformatsioon mis tahes suuruse või kujuga konstruktsioonides.
- Reaalajas tervise füüsilise struktuuri jälgimine.
- Ehitised ja sillad, tunnelid,Tammid, pärandkonstruktsioonid.
- Öise nägemise kaamera, elektroonilised turvasüsteemid , Sõidukite osaline tühjenemise tuvastamine ja rataste koormuste mõõtmine.
Seega ülevaade fiiberoptilised andurid ja rakendusi on arutatud. Kiudoptiliste andurite kaugsuhtluseks kasutamiseks on palju eeliseid, mis hõlmavad väikest mõõtu, kerget kaalu, kompaktsust, suurt tundlikkust, suurt ribalaiust jne. Kõik need omadused kasutavad fiiberoptilist andurina kõige paremini. Peale selle selle teema kohta abi saamiseks või anduripõhised projektiideed , võite meiega ühendust võtta, kommenteerides allolevas kommentaaride jaotises.
Foto autorid:
- Kiudoptiline andur automatiseerimise otsene
- Keemiline andur viha.
- Bio meditsiiniline andur imimg










{kind=link}
{kind=link}
{kind=link}