Selles projektis õpime servomootori põhispetsifikatsioone ja ka seda, kuidas servomootorit juhtida, kasutades taimeri 555 IC ja paari nuppu.
Autor Ankit Negi
MIKS SERVO?
Servomootorid kasutatakse erinevates valdkondades. Neid kasutatakse peamiselt ajamitena piirkondades, kus vajame väljundkoormuse juhtimiseks täpset liikumist.
Parim näide on RC-auto. Vaatame, et soovite 45-kraadist liikumist, mitte rohkem ega vähem. Sellisel juhul ei saa te kasutada lihtsat alalisvoolumootorit, sest see ületab soovitud asendi iga kord, kui selle sisse lülitate.
Seega vajame selle ülesande täitmiseks servomootorit, kuna see mitte ainult ei pööra täpset 45-kraadist pööret, vaid peatub ka sujuvalt soovitud asendis.

PALJU TEADA TEHNILISI PUNKTE:
A) Enne servo ostmist või kasutamist peate teadma, mis selle sees on ja kuidas see töötab. servomootor koosneb kolmest põhikomponendist:
1. Alalisvoolumootor
2. 1 Potentsiomeeter, kas analoog või digitaalne
3. Juhtimisahel
B) Servomootorist tuleb kokku 3 juhet:
1. PUNANE: pakkumise positiivseks
2. MUST: pakkumise negatiivseks
3. ORANŽ VÕI KOLLANE: ühendatud võrdluspingega, st pwm-allikaga
C) Servomootor võib neutraalasendist pöörata 90 kraadi mõlemas suunas, kattes maksimaalselt 180 kraadi, st kas 90 kraadi päripäeva või 90 kraadi vastupäeva.
Mootori pööramiseks päripäeva peab kella impulss olema suurem kui 1,5 millisekundit ja selle pööramine vastupäeva ajal peab olema väiksem kui 1,25 millisekundit, kuid sagedus peaks jääma vahemikku 50–60 hertsit.
Seega kasutame taimerit 555 meie jaoks selliste impulsside genereerimiseks.
SELLE PROJEKTI NÕUTAVAD KOMPONENDID:
1. SERVO MOTOR
kaks. 555 TAIMER
3. 6 VOLT AKU
4. KAKS NUPU
5. Takistid: 1K, 4,7K, 33K, 10K, 68K, kõik 1/4 vatti 5%
6. ÜKS TRANSISTOR (BC547)
7. KAKS KAPASITAATORI 0,1 u
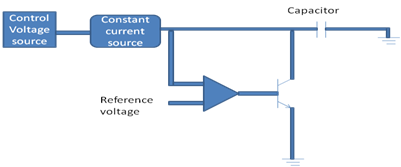
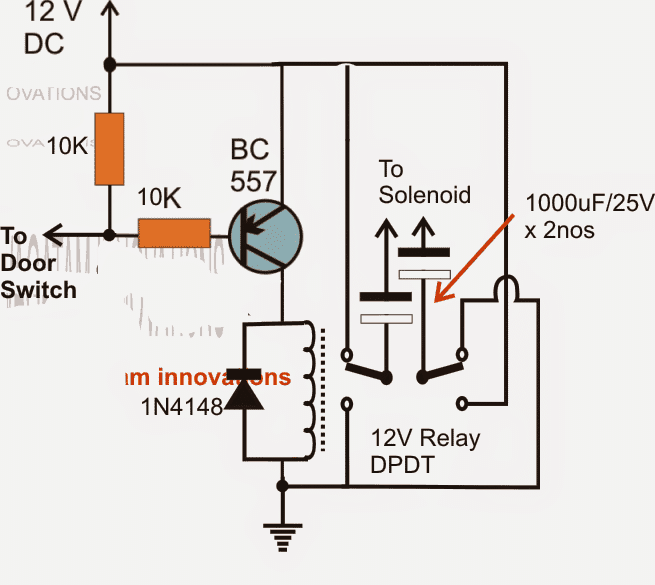
VIRDIAGRAMM NÄITAB, kuidas IC 555-ga KASUTADA SERVO-Mootorit.

Looge ühendused vastavalt ülaltoodud skeemile.
Ühendage mootori positiivne ja negatiivne tihvt vastavalt aku positiivse ja negatiivse klemmiga. Ja ühendage signaal või võrdlusnõel transistori kollektoriklemmiga.
JOONITÖÖ:
1. Edaspidi vajutamisel
Kui see juhtum ilmneb, ühendatakse 68 K takisti tühjendus- ja lävepoldi vahel. Nüüd pole kondensaator esialgu laetud, nii et tihvt 2 on 0 voltil, mis on väiksem kui 1/3 rakendatud pingest.
See lähtestab klapi 555 sees ja annab väljundklemmile loogika 1, millega transistori alus on ühendatud.
See põhjustab transistori sisselülitamise ja voolu juhtimise otse maapinnale, kuna mootori signaalpolt saab nulli, kuna see tihvt on otse ühendatud kollektori klemmiga.
Kuna kondensaator hakkab laadima, kui väljund on 1, muutub väljund väärtuseks 0 niipea, kui kondensaatori pinge muutub suuremaks kui 2–3 rakendatud pingest, kui see on otseselt ühendatud lävivardaga.
Nüüd on transistor välja lülitatud ja signaali tihvt saab loogika 1.
Sellel viisil genereeritakse pwm signaale mootori võrdlustihvti juures. Nüüd on antud juhul genereeritud impulsi ajaperiood suurem kui 1,5 millisekundit, mille saate arvutada töötsükli valemi abil 555. Ja seega saame mootori pöörlemise 90 kraadi päripäeva, nagu on selgitatud ülaltoodud lõigus.
1. Kui vajutada tahapoole nuppu-
Kui see juhtum tekib, ühendatakse 10 K takisti tühjendus- ja klemmtapi vahel, mis on väiksem kui 68 k oomi takisti. Seega on pulsi sisse lülitatud ajavahemik tund kui 1,5 millisekundit, mille saate arvutada töötsükli valemi abil 555 jaoks.
Nüüd genereeritakse pwm mootori võrdlustihvti külge samamoodi nagu ülaltoodud juhul. Seega saame mootori 90-kraadise vastupäeva pöörlemise, nagu on selgitatud ülaltoodud lõigus.
** Mõlemal juhul on sagedus vahemikus 40 kuni 60 hertsit
Eelmine: 2,4 GHz 10-kanaliline kaugjuhtimispult Järgmine: Kompaktne kolmefaasiline IGBT draiveri IC STGIPN3H60 - andmeleht, Pinout