Sissejuhatus robotitesse
Robot on masin, mis näeb välja nagu inimene. See on programmeeritud tegema midagi. Sõna Robot pärineb slaavi sõnast robota (tähendab sunnitöölist). Robot töötati välja 1960. aastatel. Robotid on valmistatud metallidest ja muude elementide segistist. Robotid lihtsalt käskivad ja mida inimesed ütlevad. 30 aastat tagasi olid robotid midagi ulmefilmis. Kuid tänapäeval kasutatakse robootikat paljudes valdkondades. Ja see on inimkonna tuleviku jaoks väga oluline. The robottehnoloogiad riigikaitse, tervishoiu, tootmise, sisejulgeoleku, hariduse, tarbekaupade ja paljude erinevate sektorite abistamiseks. Juba arstid kasutavad robootikat spetsiaalsetes operatsioonides. Robotid on olulised, kuna need täidavad ülesandeid, mida on ohtlik ja võimatu teha ka inimesel.
5 põhjust, miks robotid on populaarsed olnud
- Kiirus
- Ohtlikud keskkonnad
- Korduvad ülesanded
- Tõhusus
- Täpsus
Kiirus:
Roboteid võidakse kasutada, kuna nad on ülesannete täitmisel kiiremad kui inimesed. Robot on tegelikult mehhanism, mida juhib arvuti. Me teame, et arvutid saavad arvutustega töödelda andmeid inimestega võrreldes väga kiiresti. Mõni robot liigub kiiremini kui inimene, kiiremini kui ükski ülesanne, näiteks esemed kätte ja sisestades.
Ohtlikud keskkonnad:
Roboteid võidakse kasutada ohtlikus keskkonnas, kuna need võivad töötada kohas, kus inimene oleks ohus. Näiteks saab roboti projekteerida nii, et see seisaks koos suurema koguse soojuse, kiirguse, keemiliste aurudega, kui inimene suudaks.
Korduvad ülesanded:
Mõnikord pole robotid tegelikult palju kiiremad kui inimesed, kuid nad suudavad lihtsalt sama tööd ikka ja jälle teha. See on roboti jaoks lihtne, sest kui robot on programmeeritud tööd tegema üks kord, võib sama programmi töö tegemiseks mitu korda käivitada. Ja robot ei hakka igavaks, nagu inimene seda teeks.
Tõhusus:
Tõhusus seisneb ülesannete täitmises jäätmeteta. See tähendab
- Ei raiska aega
- Materjalide raiskamine
- Ei raiska energiat
Täpsus:
Täpsus on seotud ülesannete väga täpse täitmisega. Tehaseid valmistavas tehases tuleb iga toode valmistada ühesugusena. Esemete kokkupanekul saab robot osi paigutada millimeetri murdosa ulatuses.
Roboti juhtimine
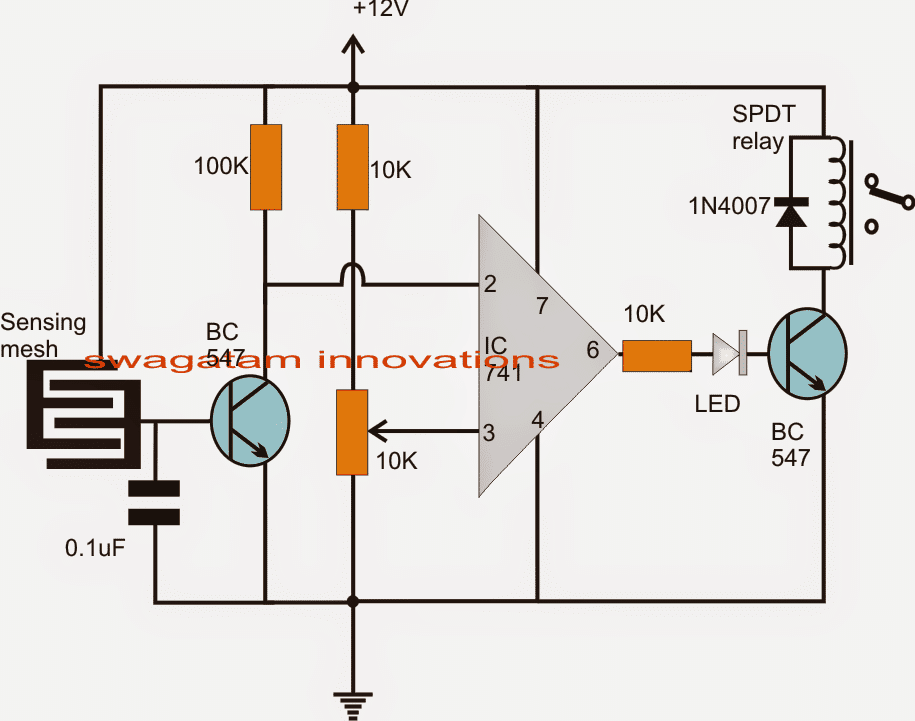
Põhirobot ehk robotisüsteem koosneb jäigast korpusest, kuhu mahub kogu roboti vooluring. Lülitus koosneb anduritest, mis tajuvad mis tahes muutusi keskkonnas ja edastavad selle teabe juhtplokile.
Andurite sisendi põhjal juhib juhtplokk vastavalt ajame. Seega on roboti peamine töö juhtimisseadmel. Mõnes rakenduses on robot täiesti automaatne, st juhtimine asub seadmes endas ja mõnele anduriseadmele tuginedes juhib ajame automaatselt juhtplokk. Mõnes rakenduses juhitakse robotit käsitsi.
Vaatame kahte viisi, kuidas robotit käsitsi juhtida
- Mobiiltelefoni kasutamine
- Teleri puldi kasutamine
Mobiiltelefoniga juhitav robotsõiduk:
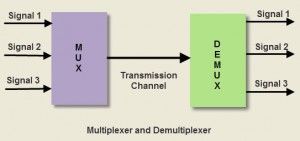
Kui me räägime juhtmeta robotiga sõidukid , mõtleme üldiselt raadiosagedustehnoloogia ahelatele. Kuid see projekt on väga erinev. See kasutab robotsõiduki liikumise juhtimiseks mobiiltelefoni. Siin oleme kasutanud DTMF-tehnoloogiat, et juhtida robotsõidukit mobiiltelefoni abil. Kasutasime kahte mobiiltelefoni, üks on ühendatud robotiga ja teine on kasutaja telefon. Nende kahe mobiiltelefoni vahel on side loodud ja kui vajutate mõnda klahvi, kuuleb see toon raku teises otsas. Seda tooni nimetatakse kahetooniliseks mitme sagedusega tooniks (DTMF).

Mobiiltelefoniga juhitav robotsõiduk

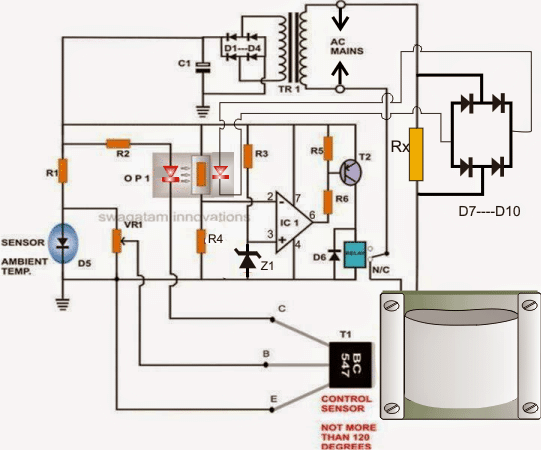
Mobiiltelefoni juhitava robotsõiduki vooluringi skeem
Selle projekti eesmärk on arendada välja a robot sõiduk seda juhib mobiiltelefon. See põhineb mikrokontrolleril 8051. Kaks mobiiltelefoni juhivad robotit vastavalt nõuetele. Üks mobiiltelefon on ühendatud robotiga ja teine on kasutajarakk. Kui kasutaja mobiiltelefonil vajutatud klahv genereerib vastava tooni, võetakse see vastu teises rakus. Vastuvõetud tooni töötleb mikrokontroller DTMF-dekooderi abil. Dekooder dekodeerib DTMF-tooni kahendarvudeks ja need binaarkodeeritud andmed saadetakse mikrokontrollerile. Tuginedes mobiiltelefoni sisendile, annab mikrokontroller vastavalt mootori juhile korralikke signaale iga mootori soovitud suunas pööramiseks. Näiteks kasutaja mobiilis teatud numbri vajutamisel valitakse kõne automaatselt süsteemi mobiiltelefoni. Mobiilne süsteem on ühendatud DTMF-dekooderiga, mis vastavalt dekodeerib tooni ja mootorit pööratakse vajutatud numbrile vastavas suunas.
IR-ga juhitav robotsõiduk:
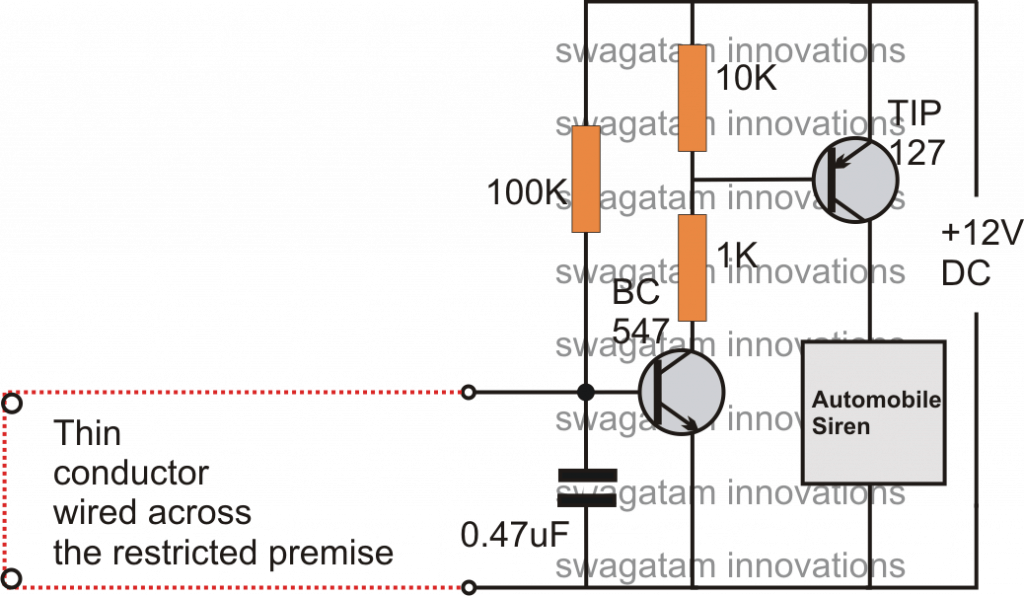
Selles süsteemis juhib peamiselt robot-sõidukit teleripult. Infrapuna (IR) andur on liides roboti juhtplokiga kaugsignaali tuvastamiseks. See teave edastatakse juhtseadmele, mis liigutab robotit vastavalt nõudele. Juhtimissüsteemina kasutatakse mikrokontrollerit.
Selles IR-kaugjuhtimispuldis kasutatakse saatjat. Kui kaugjuhtimispuldil nuppu vajutatakse, läbib signaali IR-vastuvõtja. See märk saadetakse mikrokontrollerile, mis dekodeerib signaali ja teostab vastavat liikumist vastavalt kaugjuhtimispuldil vajutatud nupule. Näiteks kui kaugjuhtimispuldil vajutatakse numbrit 1, pööratakse robot meie nõude järgi vasakule. Teiste ettevõtjate test (edasi, tagasi ja parem) viiakse läbi võrdleval viisil, kasutades IR-i. Vastuvõtvas otsas saavutatakse areng kahe mootoriga, mis on ühendatud mikrokontrolleriga.
Programm on kirjutatud, st kui see täidetakse, saadab see mootori juhi IC-le käsud vastavalt mootori käitamise nõudele roboti liikumiseks, nagu eespool selgitatud.

Infrapunakiirusega juhitav robot-sõiduki plokkskeem
Kui teil on selle artikli suhtes kahtlusi, palun jätke kommentaar. Ja andke mulle teada rohkem sellega seotud rakendusi ja meetodeid?