Servopinge stabilisaator
Servo juurde pinge stabilisaator on suletud ahelaga juhtimismehhanism, mis aitab tasakaalustatud 3 või ühefaasilist pinge väljundit säilitada vaatamata tasakaalustamatute tingimuste tõttu sisendis esinevatele kõikumistele. Enamik tööstuslikke koormusi on kolmefaasilised asünkroonmootorite koormused ja reaalses tehasekeskkonnas on 3 faasi pinge harva tasakaalustatud. Oletame näiteks, et mõõdetud pinged on 420, 430 ja 440V, keskmine on 430V ja kõrvalekalle 10V.
Tasakaalustamatuse protsent on antud
(10V X 100) / 430V = 2,3% On näha, et 1% pinge tasakaalustamatus suurendab mootori kadusid 5%.
Seega võib pinge tasakaalustamatus suurendada mootori kadusid 2% -lt 90% -le ja seega tõuseb temperatuur ka liiga palju, mille tulemuseks on veelgi suuremad kadud ja vähenenud efektiivsus. Seetõttu tehakse ettepanek võtta vastu projekt tasakaalustatud väljundpinge säilitamiseks kõigis kolmes etapis.
Üksik faas:
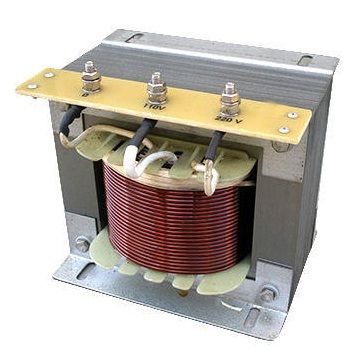
See põhineb põhimõttel, mille kohaselt AC-pinge lisatakse sisendisse soovitud väljundi saamiseks trafo nimega Buck-Boost trafo (T), mille sekundaarne on sisendpingega järjestikku ühendatud. Selle primaar toidetakse mootoriga monteeritava trafo (R) kaudu. Sõltuvalt primaarse ja sekundaarse pinge suhtest tuleb sekundaarse indutseeritud pinge kas faasis või faasist välja, tuginedes pinge kõikumine . Muutuvat trafot toidetakse tavaliselt sisendvarust mõlemast otsast, samal ajal kui umbes 20% mähisest koputamist võetakse Buck-Boosti trafo primaarse fikseeritud punktina. Autotrafo muutuv punkt on seega võimeline andma 20% faasipingest, mida kasutatakse pumbaoperatsiooniks, samas kui 80% on sisendpinge faasis ja seda kasutatakse töö suurendamiseks. Muutuva trafo klaasipuhasti liikumist kontrollitakse väljundpinge tajumisega juhtimisahelale, mis otsustab sünkroonmootori pöörlemissuuna, mida juhitakse läbi TRIAC paari selle poolitatud faasimähisesse.
3-faasiline tasakaalustatud sisendi parandus:
Väikese võimsusega töötamiseks, näiteks umbes 10KVA, on praegu näha, et kasutatakse kahekordse haavaga variaki, mis kõrvaldab Buck-Boosti trafo muutuva trafo enda juures. See piirab variaatori klaasipuhasti liikumise 250 kraadini, kuna sekundaarmähise jaoks kasutatakse tasakaalu. Ehkki see muudab süsteemi ökonoomseks, on sellel töökindluse osas tõsiseid puudusi. Tööstuse standard ei aktsepteeri kunagi sellist kombinatsiooni. Mõistlikult tasakaalustatud sisendpinge piirkondades kasutatakse stabiliseeritud väljundina ka kolmefaasilisi servo-juhitavaid korrektoreid, samas kui ühte sünkroonmootorit ja ühe juhtkaarti, mis tuvastavad kahefaasilist pinget kolmest, kasutatakse ühte kolmefaasilist variaaki. See on palju ökonoomsem ja kasulikum, kui sisendfaasid on mõistlikult tasakaalus. Selle puuduseks on see, et kuigi toimub tugev tasakaalustamatus, on väljund proportsionaalselt tasakaalustamata.
3-faasiline tasakaalustamata sisendi korrigeerimine:
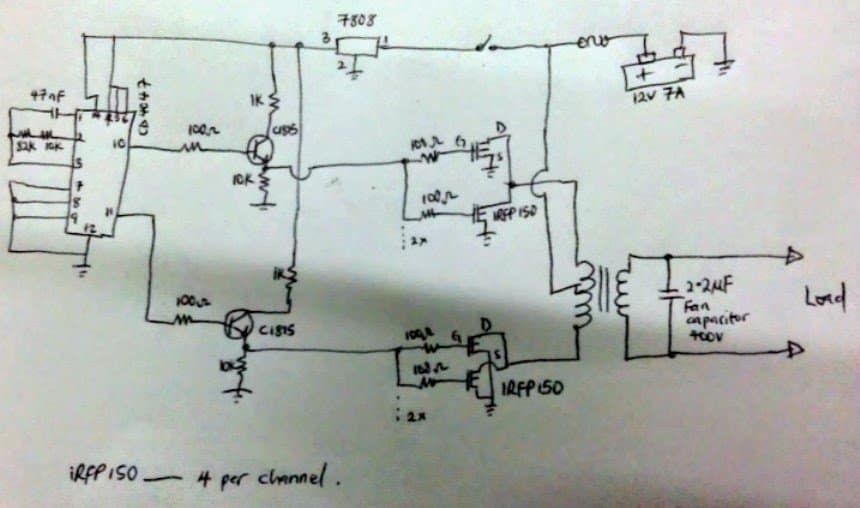
Kolm seeria trafot (T1, T2, T3), millest iga sekundit kasutatakse, igas faasis üks, mis kas liidab või lahutab pinge sisendtoidupingest, et anda igas faasis püsiv pinge, muutes tasakaalustatud väljundi tasakaalustamata sisendist. Seeriamuunduri primaari sisend toidetakse igast faasist ühest muutuvast autotrafost (Variac) (R1, R2, R3), mille klaasipuhasti on ühendatud vahelduvvoolu jagatud faasiga (2 pooli) sünkroonmootoriga (M1, M2) M3). Mootor saab iga oma mähise vahelduvvoolu türistori ümberlülitamise kaudu kas päripäeva või vastupäeva pööramiseks, et võimaldada soovitud väljundpinge variaakist jadatrafo primaarseks kas faasis või faasist väljas, et teha liitmisi või lahutusi nagu nõutakse jada trafo sekundaaris, et säilitada väljundis püsiv ja tasakaalustatud pinge. Tagasiside väljundist juhtimisahelasse (C1, C2, C3) võrreldakse fikseeritud võrdluspingega op-ampritest moodustatud tasemevõrdlustega, et lõpuks käivitada TRIAC vastavalt mootori käivitamise vajadusele.
See skeem koosneb peamiselt juhtimisahelast, ühefaasilisest servo-induktsioonmootorist, mis on ühendatud igas faasis seeria trafo variaatoritoitega.
- Juhtimisahel, mis koosneb transistoride ümber traadiga ühendatud akna võrdlusest ja RMS-i veasignaali pinge võimendusest IC 741 abil, on multisimis ja simuleeritakse mitmesuguste sisendtingimuste jaoks, tagades kondensaatori faasinihkega induktsioonmootori töötavate TRIAC-de süütamise mis kontrollib variaakipuhasti pöörlemist.
- Lähtudes pinge kõikumiste maksimaalsest ja minimaalsest väärtusest, kavandatakse seeria trafo ja juhttransformaatorid standardsete valemitega, mis sobivad kaubanduslikult saadaval oleva rauast südamiku ja superemailitud vasktraadi suurusega, enne kui need projektis kasutamiseks keritakse.
Tehnoloogia:
Tasakaalustatud kolmefaasilises elektrisüsteemis on kõik pinged ja voolud ühesuguse amplituudiga ja faasinihkega üksteisest 120 kraadi. Kuid see pole praktiliselt võimalik, kuna tasakaalustamata pinged võivad põhjustada ebasoodsat mõju seadmetele ja elektrilisele jaotussüsteemile.
Tasakaalustamata tingimustes tekitab jaotussüsteem rohkem kadusid ja kütteefekte ning on vähem stabiilne. Pinge tasakaalustamatuse mõju võib olla kahjulik ka sellistele seadmetele nagu asünkroonmootorid, elektrilised muundurid ja reguleeritava kiirusega ajamid (ASD). Suhteliselt väike protsent kolmefaasilise mootoriga pinge tasakaalustamatust põhjustab mootorikadude olulist suurenemist, mis toob kaasa ka efektiivsuse vähenemise. Energiakulusid saab paljudes rakendustes minimeerida, vähendades pinge tasakaalustamatuse tõttu kaotatud mootori võimsust.
Pinge tasakaalustamatuse protsent on NEMA määratletud kui liinipinge 100-kordne kõrvalekalle keskmisest pingest jagatuna keskmise pingega. Kui mõõdetud pinged on 420, 430 ja 440V, on keskmine 430V ja kõrvalekalle 10V.
Protsendi tasakaalustamatuse annab (10 V * 100/430 V) = 2,3%
Seega suurendab 1% pinge tasakaalustamatus mootori kadusid 5%.
Seega on tasakaalustamatus tõsine elektrikvaliteedi probleem, mis mõjutab peamiselt madalpinge jaotussüsteeme, ja seetõttu tehakse projektis ettepanek säilitada igas faasis tasakaalustatud pinge suurusjärgus, säilitades seeläbi tasakaalustatud liinipinge.
SISSEJUHATUS:
A.C. Pinge stabilisaatorid on mõeldud stabiliseeritud vahelduvvoolu saamiseks. varustus kõikuvast sissetulevast vooluvõrgust. Nad leiavad rakendusi kõigis elektri-, elektroonika- ja paljudes muudes tööstusharudes, uurimisasutustes, laboratooriumides, haridusasutustes jne.
Mis on tasakaalutus:
Tasakaalustamatuse seisund viitab seisundile, kui kolmefaasilistel pingetel ja vooludel ei ole sama amplituud ega sama faasinihe.
Kui üks või mõlemad neist tingimustest ei ole täidetud, nimetatakse süsteemi tasakaalustamata või asümmeetriliseks. (Selles tekstis eeldatakse kaudselt, et lainekujud on sinusoidaalsed ega sisalda seega harmoonilisi.)
Tasakaalustamatuse põhjused:
Süsteemihaldur püüab PCC-s tagada tasakaalustatud süsteemipinge jaotusvõrgu ja kliendi sisevõrgu vahel.
Kolmefaasilise süsteemi väljundpinged sõltuvad generaatorite väljundpingetest, süsteemi impedantsist ja koormusvoolust.
Kuid kuna kasutatakse peamiselt sünkroongeneraatoreid, on genereeritud pinged väga sümmeetrilised ja seetõttu ei saa generaatorid olla tasakaaluhäirete põhjuseks. Madalama pingetaseme ühendustel on tavaliselt kõrge impedants, mis viib potentsiaalselt suurema pinge tasakaalustamatuseni. Süsteemikomponentide takistust mõjutab õhuliinide konfiguratsioon.
Pinge tasakaalustamatuse tagajärjed:
Elektriseadmete tundlikkus tasakaalustamatuse suhtes on seadmetelt erinev. Lühike ülevaade levinumatest probleemidest on toodud allpool:
a) induktsioonmasinad:
Need on a.c. sisemiselt indutseeritud pöörlevate magnetväljadega sünkroonmasinad, mille suurus on võrdeline otseste ja / või pöördkomponentide amplituudiga. Seega tasakaalustamata toite korral muutub pöörlev magnetväli ümmarguse asemel elliptiliseks. seega seisavad induktsioonimasinad peamiselt pinge tasakaalustamatuse tõttu kolme liiki probleemide ees
1. Esiteks ei saa masin oma täielikku pöördemomenti toota, kuna negatiivse järjestuse süsteemi pöördvõrdeliselt pöörlev magnetväli tekitab negatiivse pidurdusmomendi, mis tuleb lahutada normaalse pöörleva magnetväljaga seotud alusmomendist. Järgmisel joonisel on näidatud induktsioonmasina erinevad pöördemomendi libisemise omadused tasakaalustamata toiteallikas

2. Teiseks, laagrid võivad mehaanilisi kahjustusi põhjustada süsteemi topeltsagedusel indutseeritud pöördemomendi komponentide tõttu.
3. Lõpuks kuumutatakse staatorit ja eriti rootorit ülemäära, mis võib kaasa tuua kiirema termilise vananemise. Selle kuumuse põhjustab olulise voolu induktsioon rootori poolt vaadatuna kiiresti pöörleva (suhtelises mõttes) pöördmagnetvälja poolt. Selle lisaküttega toimetulemiseks peab mootor olema nomineeritud, mis võib vajada suurema võimsusega masina paigaldamist.
TEHNIKA-MAJANDUS:
Pinge tasakaalustamatus võib põhjustada mootori enneaegset riket, mis mitte ainult ei põhjusta süsteemi plaanivälist väljalülitamist, vaid põhjustab ka suuri majanduslikke kahjusid.
Madala ja kõrge pinge mõju mootoritele ja sellega seotud jõudluse muutused, mida võib eeldada, kui kasutame muid kui nimeplaadil märgitud pingeid, on toodud järgmiselt:
Madalpinge mõjud:
Kui mootori pinge on alla andmesildi nimiväärtuse, muutuvad mõned mootori omadused veidi ja teised dramaatiliselt.
Liinilt tõmmatud võimsuse hulk tuleb fikseerida kindla koormuse jaoks.
Mootori ammutatava võimsuse hulk on ligikaudselt seotud pinge ja vooluga (amprites).
Võimsuse sama suuruse säilitamiseks toimib voolutõus kompenseerimisel, kui toitepinge on madal. See on aga ohtlik, kuna suurema voolu tõttu tekib mootorisse rohkem soojust, mis lõpuks mootori hävitab.
Seega on madalpinge rakendamise puudused mootori ülekuumenemine ja mootor on kahjustatud.
Peamise koormuse (asünkroonmootorid) algmoment, tõmbemoment ja väljatõmbemoment rakendatud pinge ruudu põhjal.
Üldiselt võib pinge nimiväärtuse 10% -line vähendamine põhjustada väikese käivitusmomendi, tõmbe- ja tõmbemomendi.
Kõrgepinge mõjud:
Kõrge pinge võib põhjustada magnetite küllastumise, põhjustades mootori raua magnetiseerimiseks liigset voolu. Seega võib kõrgepinge põhjustada ka kahjustusi. Kõrgepinge vähendab ka võimsustegurit, põhjustades kadude suurenemist.
Mootorid taluvad projekteeritud pingest kõrgema pinge teatud modifikatsioone. Kui projekteeritud pinge ületavad äärmused põhjustavad voolu tõusu koos vastavate muutustega kütmisel ja mootori eluea lühenemisega.
Pingetundlikkus mõjutab lisaks mootoritele ka teisi seadmeid. Releedes ja starterites leiduvad solenoidid ja mähised taluvad madalat pinget paremini kui kõrgepinget. Teised näited on luminofoor-, elavhõbeda- ja kõrgsurvega naatriumvalgustusseadmete ning trafode ja hõõglampide liiteseadised.
Üldiselt on seadmete jaoks parem, kui me muudame sissetulevate trafode kraanid, et optimeerida jaama põranda pinge seadmete reitingutele lähedaseks, mis on projektis kavandatud pinge stabiliseerimise kontseptsiooni peamine kontseptsioon.
Reeglid toitepinge määramiseks
- Väikesed mootorid on ülitundlikkuse ja küllastumise suhtes tundlikumad kui suured mootorid.
- Ühefaasilised mootorid kipuvad olema ülipinge suhtes tundlikumad kui kolmefaasilised mootorid.
- U-raami mootorid on ülitugevuse suhtes vähem tundlikud kui T-raamid.
- Kõrgkvaliteetne Super-E mootor on ülitugevuse suhtes vähem tundlik kui tavalise efektiivsusega mootor.
- 2- ja 4-pooluselisi mootoreid mõjutab kõrgepinge vähem kui 6- ja 8-pooluselisi.
- Ülepinge võib tõsta voolutugevust ja temperatuuri isegi kergelt koormatud mootorite korral
- Tõhusust mõjutab ka see, kui see väheneb madala või kõrge pinge korral
- Võimsustegur väheneb kõrgepinge korral.
- Sisselülitusvool tõuseb suurema pingega.
Hankige rohkem teadmisi mitmesuguste elektrooniliste kontseptsioonide ja vooluringide kohta, tehes mõnda mini elektroonika projektid inseneritasandil.