Üldiselt ei saa ventiil protsessi ise juhtida, seega on neil vaja operaatorit, kes need protsessimuutuja juhtimiseks paigutaks. Ventiilide kaugjuhtimiseks ja automaatseks liigutamiseks on vaja spetsiaalset seadet, näiteks täiturmehhanismi. Täiturmehhanism on teatud tüüpi seade, mida kasutatakse millegi toimimiseks või liikumiseks. Täiturmehhanismid on saadaval kolme tüüpi, mis on määratletud nende energiaallika järgi ja mida kasutatakse sellistes tööstusharudes nagu elektri-, hüdraulika- ja pneumaatika. Nii et see artikkel käsitleb ülevaadet pneumaatiline ajam – töö ja nende rakendused.
Mis on pneumaatiline ajam?
Pneumaatilise täiturmehhanismi määratlus on; teatud tüüpi täiturmehhanism, mida kasutatakse suruõhu kujul oleva energia liikumiseks muutmiseks. Erinevad tootjad pakuvad erinevat tüüpi pneumaatilisi täiturmehhanisme, kus mõned täiturmehhanismid muudavad suruõhu energia lineaarseks liikumiseks ja mõned täiturmehhanismid muudavad pöörleva liikumise. Nendel täiturmehhanismidel on tööstuses erinevad nimetused, nagu õhusilindrid, õhuajamid ja pneumaatilised silindrid.

Kuidas pneumaatiline ajam töötab?
Pneumaatiline ajam sõltub peamiselt mingist survestatud gaasist, näiteks suruõhust, mis siseneb kambrisse rõhu tekitamiseks. Kui see õhk tekitab piisava rõhu võrreldes välise atmosfäärirõhuga, põhjustab see seadme, näiteks hammasratta või kolvi, kontrollitud kineetilise liikumise. Nii et see tulemuseks olev liikumine on suunatud kas ringikujuliselt või sirgjooneliselt. Need täiturmehhanismid on paljudes praegustes tööstusharudes üks sagedamini kasutatavaid mehaanilisi seadmeid, kui surugaas muundatakse energiaks, mis on äärmiselt kontrollitav ja korratav ja töökindel.
Pneumaatilise täiturmehhanismi ehitus ja töö
Pneumaatiline täiturmehhanism on valmistatud erinevate komponentide, nagu vedru, kompressor, reservuaar, membraan ja ventiil, abil. Järgnev diagramm kujutab pneumaatilise täiturmehhanismi ehitust. Selle süsteemi juhtimiseks muudetakse vedeliku energia mehaaniliseks. Selles süsteemis surutakse värske õhk kompressori kaudu kokku ja seda õhku hoitakse lihtsalt säilitusmahutis.
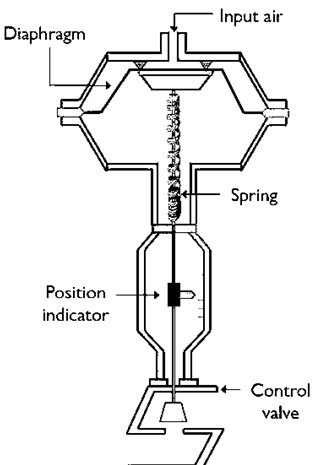
Siin kasutatakse õhu suuna ja selle voolukiiruse reguleerimiseks voolu reguleerimisventiili. Selle täiturmehhanismi vedruüksus juhib õhuvoolu ühest kohast teise ja annab ka tagasilöögi kolvi suunas.
Alguses jääb juhtklapp avatuks ja õhuvarustuse vajaduse korral tõmmatakse membraan vedru abil üles. Seejärel tõmmatakse õhk atmosfäärist, see filtreeritakse filtri abil ja suunatakse kompressorisse. Nüüd surub kompressor õhu kokku ja suurendab rõhu taset.
Siin tuleb tähele panna, et õhurõhu taseme tõstmisel tõuseb ka õhu temperatuur. Seega kasutatakse õhujahuteid temperatuuri hoidmiseks mõõdukas vahemikus. Pärast seda hoitakse rõhu all olevat õhku lihtsalt säilitusmahutis, nii et rõhu taset saab säilitada. Lisaks suunab see süsteemis olev surveõhk energiat pneumaatilise täiturmehhanismi membraanile. Kui jõud ületab survestatud õhu tõttu vedru jõu, hoiab see membraani ülaosas, põhjustades membraani liikumist allapoole ja juhtventiili sulgemiseks.

Kui õhuvarustusrõhku suurendatakse, liigub membraan pidevalt allapoole ja see sulgeb juhtventiili teatud punktis täielikult. Samamoodi, kui õhuvarustuse rõhk on vähenenud, ületab vedru poolt membraanile rakendatav jõud toitejõu tõttu. See võib põhjustada membraani liikumise ülespoole, et avada juhtventiil.
Siinkohal märgitakse ka, et juhtventiili asend sõltub peamiselt õhurõhust. Selle tulemusena on juhtventiili avamine ja sulgemine seotud membraani liikumisega õhurõhu mõjul.
Teame, et pärast kontrollerit on täiturmehhanismid selleks, et anda juhtsignaal eelistatud toimingu toimumiseks. Seega muudetakse õhurõhku saadud juhtsignaali alusel ja see muudab samaaegselt ka juhtklapi asendit. Sel viisil töötab see täiturmehhanism vastavalt vastuvõetud juhtsignaalile ja juhib protsessi.
Pneumaatiliste ajamite tüübid
Pneumaatilisi ajamid on erinevat tüüpi, nagu kolvid, pöörlevad labad ja vedrud või membraanid.
Kolvi pneumaatiline ajam
Seda tüüpi pneumaatiline ajam kasutab silindris asuvat kolvi. Kolvi liikumise võib põhjustada lihtsalt väiksema või suurema võimsuse rakendamine kolvi ühele küljele.

Ühekordse toimega kolvitüüpi pneumaatiline ajam kasutab vedru ühel küljel ja muudab jõu teisele küljele, samas kui kahetoimelisel kolvitüüpi pneumaatilisel ajamil on õhurõhk, mis rakendatakse kolvi mõlemale küljele. Kolvi lineaarset liikumist saab otse kasutada lineaarse liikumise käivitamiseks, vastasel juhul saab selle muuta hammasratta ja hammaslati või sellega seotud mehaanilise paigutusega pöörlevaks liikumiseks. Need täiturmehhanismid on lihtsalt äratuntavad silindri läbimõõdu ja käigu pikkuse järgi. Suure silindriga pneumaatiline ajam on võimeline avaldama rohkem jõudu.
Pöördlaba pneumaatiline ajam
Pöördlaba tüüpi pneumaatiline ajam lihtsalt töötab nagu kahe survekambriga kolb-pneumaatiline ajam. Selle täiturmehhanismi korpus on pigem pirukakiilu kui silindrikujuline. Väljundvõlliga aer jagab lihtsalt kaks survekambrit. Laba vaheastme muutmine liigutab väljundvõlli vastavalt kogu selle 90-kraadise liikumise jooksul.

Vedru/membraaniga pneumaatiline ajam
Seda tüüpi pneumaatiline ajam vajab suruõhku, et suruda membraan vastu plaati, mille vastu on vedru. Kui rõhk on langetatud, tõmbab vedru diafragma tagasi. Nii et jõudu muutes saab positsiooni saavutada. Seda tüüpi täiturmehhanism võib tõrgeteta avada/tõrgeteta sulgeda, kui õhujõud kaob vedru tõttu, mis tagastab täiturmehhanismi katkestusasendisse.

Eelised ja miinused
The pneumaatilise täiturmehhanismi eelised s hõlmavad järgmist.
- Pneumaatilised ajamid tagavad suure jõu ja kiire liikumiskiiruse, kui neid on kasutatud lineaarsel liikumisel põhinevates rakendustes.
- Nendel täiturmehhanismidel on kõrge vastupidavus.
- Neil on kõrge töökindlus.
- Need on eelistatud seadmed, mille puhul hügieen on rakendustes hädavajalik.
- Kuluefektiivne.
- Neid on väga lihtne hooldada ja paigaldada
- Need on äärmiselt vastupidavad ja võivad vähendada nende jõudluse säilitamiseks vajalikke kulusid.
- Nendel täiturmehhanismidel on lai temperatuurivahemik, mis jääb vahemikku 0–200 °C.
- Need on plahvatus- ja tulekindlad.
- Pneumaatiliste ajamite kaal on väiksem.
The pneumaatiliste ajamite puudused sisaldama järgmist.
- Selle täiturmehhanismi o/p võimsus on väiksem kui hüdroajamil.
- Masina sisemisi osi ei määrita, kuna kasutatakse õhku nagu vedelikku.
- Väljundi täpsus on madalal kiirusel põhinevate toimingute puhul üsna väiksem.
- Need täiturmehhanismid töötavad väga tõhusalt, kui neid kasutatakse konkreetsetes rakendustes.
- Need ei toimi hästi väiksema kiirusega.
- Suruõhk vajab head ettevalmistust
- Õhku võib saastada määrimine või õli, mis vähendab selle hooldust.
Rakendused
The pneumaatiliste ajamite rakendused sisaldama järgmist.
- Pneumaatilised täiturmehhanismid on rakendatavad paljudes rakendustes, näiteks erinevates tööstuspiirkondades ja mõned nende täiturmehhanismide kasutusvaldkonnad on sellised;
- Õhukompressorid.
- Lennundus.
- Raudtee rakendus.
- Pakkimis- ja tootmismasinad.
- Põlevad autode mootorid.
- Neid ajamid kasutatakse tavaliselt bensiinimootoriga sõidukite kolbides ja süütekambrites. Seega kasutavad nad õhksüüdet ja bensiini, et tekitada survestatud energiat, mis liigutab lõpuks kolvi ja muudab energia auto väntvõlli. Kuid need ajamid sõltuvad eelistatud mehaanilise jõu tekitamiseks enamasti rõhu all olevast gaasist ilma süüteta.
- Seda tüüpi ajamid on vajalikud pakkimis- ja tootmismasinate, õhukompressorite, postitorude ja ka transpordiseadmete jaoks, nagu lennuki- ja raudteerakendused.
Kuidas kasutatakse pneumaatikat robootikas?
Üldiselt kasutab Pneumatics füüsiliste süsteemide juhtimiseks survestatud gaasi. Neid kasutatakse laialdaselt suruõhuga robotites mehaanilise liikumise tekitamiseks.
Mis on pneumaatiline robotkäsi?
Pneumaatiline robotkäsi töötab nagu inimese käsi ja see sisaldab kahte kätt nimelt; õlavars ja käsivars. Õlavars on püsiv koos pööratava aluse liigendtoega ja aktiveeritakse pneumaatilise silindriga, samas kui käsivars on kinnitatud õlavarre külge hingedega toega. Seetõttu töötab robotkäsi nagu inimkäsi, kasutades pneumaatilist silindrit.
Seega on see ülevaade pneumaatilisest ajamist – rakendustega töötamine. Need täiturmehhanismid on tõhusad, väga töökindlad ja turvalised liikumisjuhtimisallikad, mis kasutavad gaasi või surveõhku energia muundamiseks lineaarseks või pöörlevaks liikumiseks. Need sobivad eriti hästi sagedaseks ventiilide avamiseks ja sulgemiseks ning neid kasutatakse ka muudes tööstuslikes rakendustes, kus elektri kasutamine võib põhjustada süttimis- või tuleohtu. Siin on teile küsimus, millised on täiturmehhanismide näited?