Elektrimasinates on täiturmehhanism oluline komponent, mida kasutatakse süsteemi või seadme liigutamiseks ja juhtimiseks. Täiturmehhanism kasutab energiaallikat ja ka juhtseadet. Üldiselt on juhtseade ventiil. Kui juhtseade saab juhtsignaali, reageerib täiturmehhanism kohe, muutes lihtsalt energiaallika mehaaniliseks liikumiseks. Saadaval on erinevat tüüpi ajamid, nagu pehmed, hüdraulilised, pneumaatilised, elektrilised, termilised/magnetilised ja mehaanilised ajamid. Seega käsitletakse selles artiklis ühte täiturmehhanismide tüüpidest mehaanilised ajamid – rakendustega töötamine.
Mis on mehaaniline täiturmehhanism?
Mehaaniline ajam on seade, mis kasutab füüsilise liikumise saavutamiseks toiteallikat. Need täiturmehhanismid on olulised ja saadaval peaaegu igas automaatmasinas. Nendes täiturmehhanismides kasutatavad toiteallikad on; elektrivool, pneumaatiline ja hüdrauliline, mida juhitakse käsitsi või lülitatakse SISSE/VÄLJA automatiseeritud süsteemi kaudu. Mehaanilise täiturmehhanismi ülesanne on muuta pöördliikumist lineaarseks ülekande abil erineva kiirusega. Mehaanilised täiturmehhanismid liigitatakse juhtkruvide, kuulkruvide, hammaslati ja hammasratta, rihmajamiga jne kategooriasse. Mehaaniline täiturmehhanismi skeem on näidatud allpool.

Mehaanilise täiturmehhanismi tööpõhimõte
Mehaanilise täiturmehhanismi tööpõhimõte on sooritada liikumine muutes pöörleva liikumise lineaarseks liikumiseks. Seega sõltub mehaaniline täiturmehhanism peamiselt konstruktsioonikomponentide kombinatsioonidest, nagu rööpad ja hammasrattad või ketid ja rihmarattad.
Mehaaniline täiturmehhanism
Mehaaniline täiturmehhanism on konstrueeritud mitmesuguste komponentide abil, kuid kõige aktiveerivamad komponendid on mootor, hammasratas, kruvikoost ja pikendustoru. Need täiturmehhanismid töötavad tavaliselt, muutes liikumist pöörlevalt lineaarseks.
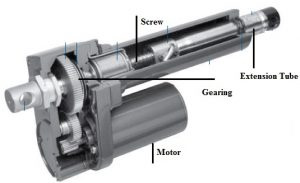
Mootor
Selles täiturmehhanismis kasutatav mootor on alalisvoolumootor, kus toodetakse kogu täiturmehhanismi võimsus.
Gearing
Ülekanne on konstrueeritud plastikust või terasest, mida kasutatakse ajami mehhanismi kiiruse ja käitatavate osade kiiruse vahelise suhte muutmiseks. Ülekanne on ühendatud lihtsalt jõuallikaga nagu mootor.

Kruvi
See täiturmehhanism töötab kruvil. Seega, keerates täiturmehhanismi mutrit, liigub kruvivõll joone sees.
Pikendustoru
Pikendustoru nimetatakse ka sisetoruks, mis on tavaliselt valmistatud roostevabast terasest või alumiiniumist. See toru on ühendatud keermestatud ajamimutriga ning see ulatub välja ja tõmbub tagasi, kui mutter pöörleb mööda pöörlevat spindlit.
Kui täiturmehhanismi mootor on sisse lülitatud, pöörab see hammasülekannet. Nii et see ülekanne lihtsalt mitmekordistab pöördemomenti ja vähendab mootori kiirust. Hammasrattad pööravad kruvi ja kruvi mutter ühendatakse lihtsalt pikendustoruga ja seda liigutatakse sisse või välja vastavalt kruvi pööramissuunale.
Mitmes täiturmehhanismis on mähisvedru katkestus, mis hoiab koormust, kui mootor ei tööta. See mähisvedru purunemine hoiab koormat igas suunas, lükates või tõmmates ilma vooluta. Erinevates ajamites kasutatavad kruvid on juhtkruvid või kuulkruvid.
Mehaaniliste täiturmehhanismide tüübid
Turul on saadaval kolme tüüpi mehaanilisi ajamid, pneumaatilisi või õhurõhu-, hüdraulilisi või vedelikurõhu- ja elektrilisi ajamid.
Pneumaatilised ajamid
Pneumaatiline ajam kasutab kontrollitud liikumise moodustamiseks survestatud gaasi või suruõhku. Need täiturmehhanismid on mitmekülgsed ja neid saab muuta mis tahes projekti jaoks kasutamiseks. Selle täiturmehhanismi peamine eelis on; seda on väga lihtne kasutada ja see on turvaline alternatiiv nii hüdraulilistele kui ka elektrilistele täiturmehhanismidele, kuna need ei vaja töötamiseks elektrit ega süüdet. Selle täiturmehhanismi peamiseks puuduseks on see, et kompressor peaks töörõhu säilitamiseks pidevalt töötama olenemata sellest, kas seadet kasutatakse või mitte.

Hüdrauliline täiturmehhanism
Hüdrauliline mehaaniline ajam kasutab mehaanilise liikumise tegemiseks vedeliku survet. Seega kasutatakse neid täiturmehhanisme peamiselt siis, kui süsteemi või masina toimimiseks on vaja märkimisväärset võimsust. Need on tavaliselt saadaval rasketes masinates, kus hüdraulilist võimsust juhitakse lihtsalt silindris oleva vedeliku koguse kaudu. Kui vedelikku suurendatakse, tekib rõhk ja rõhk väheneb vedeliku vähenemise kaudu. Kuigi need täiturmehhanismid on suure võimsusega energiavajaduse korral väga kasulikud, on need looduses muutlikud ja vajavad kasutamiseks ja hooldamiseks väga koolitatud mehaanikuid. Et rohkem teada saada Hüdrauliline täiturmehhanism .

Elektriline ajam
Elektrilist täiturmehhanismi kasutatakse energia muutmiseks elektrilisest mehaaniliseks elektritoiteallikast. Elektrilist ajamit kasutatakse ventiilide käitamiseks, toiduainete ja jookide tootmiseks, materjali käitlemiseks ja lõikamiseks. Üldiselt on neid hüdraulilise ajamiga võrreldes väga lihtne hooldada ja need pakuvad suurt täpsust. Selle kohta lisateabe saamiseks vaadake seda linki Elektriline täiturmehhanism .

Nende täiturmehhanismide peamised puudused on: need ei sobi kõikidesse keskkondadesse ja vajavad kontrolli ülekuumenemise suhtes. Nendel täiturmehhanismidel ei ole võimsuse kaotuse korral usaldusväärset asendit ja nende keskmine rikete määr on kõrgem kui pneumaatilisel täiturmehhanismil.
Omadused
Pneumaatiliste ja elektriliste täiturmehhanismide omadused on loetletud allpool.
| Omadused | Elektriline täiturmehhanism |
Pneumaatiline ajam |
|
Täiturmehhanismi tüüp |
RCS2A4CA-20-6-50-T2-S | CDJ2B10-30A |
|
Maht/dm^3 |
75.00 | 1.50 |
|
Mass/kg |
1.1 | 0,06 |
|
Horisontaalne koormus/kg |
6 | 5.5 |
| Vertikaalne koormus/kg | kaks |
4.6 |
| Töökäik/mm | viiskümmend |
30 |
| Positsioneerimine Täpsus/mm | +/- 0,02 |
+1.00 |
| Võimsuse tiheduse suhe ühikutes Horisontaalne/W/dm^3 | 6.53 |
1.76 |
|
Võimsustiheduse suhe ühikutes Vertical/W/dm^3 |
6.93 |
1.63 |
| Remont | Selle parandamine on keeruline, seega võtab see kaua aega. | Selle parandamine on lihtne, seega võtab see vähem aega. |
Eelised ja miinused
Mehaaniliste ajamite eelised hõlmavad järgmist.
- Neid täiturmehhanisme on väga lihtne kasutada.
- Täpsusaste on kõrge.
- Need on kulutõhusad.
- Need on mitmekülgsed ja kohandatavad.
- Need on väga turvalised.
- Selle jõudlus on kauakestev.
- Laiendatud töökindlus
- Lihtne seadistamine ja paigaldamine
- Liikumisjuhtimine on täpsem.
- Vähem müra.
- Vähem hooldust.
- Energiatarve on väiksem.
- Lekkeid pole ja täielik valik suurusi, valikuid ja konfiguratsioone.
The mehaaniliste täiturmehhanismide puudused on järgmised.
- Võrreldes pneumaatilisega on elektriline täiturmehhanism vähem kuluefektiivne.
- Raske töökeskkond
- Kui toide kaob, pole tõrkekindlat asendit.
- Pneumaatilises ajamis peaks kompressor pidevalt töötama
- Hüdraulilised ajamid on ebastabiilse iseloomuga.
- Hüdraulilised ajamid vajavad väga koolitatud mehaanikuid.
- Need on vibratsiooni suhtes väga tundlikud
Rakendused
Mehaaniliste ajamite rakendused hõlmavad järgmist.
- Mehaanilisi ajamid kasutatakse pöörleva liikumise muutmiseks lineaarseks.
- Need on rakendatavad, kui on vaja lineaarseid liikumisi, nagu kõrgus, translatsioon ja lineaarne positsioneerimine.
- See täiturmehhanism lihtsalt muudab üht tüüpi liikumist teiseks, kasutades rihmarattaid, hammasrattaid, kette jne.
- Need täiturmehhanismid muudavad elektrilise i/p signaali mehaaniliseks ergutusjõuks. Neid kasutatakse koos eraldi radiaatoriga hajutatud režiimiga kõlarites ja aktiivsetes juhtimisrakendustes vibratsiooni- ja mürasummutamiseks.
- Need seadmed pakuvad lihtsalt piiratud ja kontrollitud liigutusi, mida teostatakse käsitsi, elektriliselt või erinevate vedelikega, nagu hüdraulika, õhk jne.
Seega on see ülevaade mehaanilisest täitur – töökorras rakendustega. Selle täiturmehhanismi sisemised mehhanismid, mida kasutatakse i/p võimsuse liikumiseks muundamiseks, erinevad peamiselt sõltuvalt kavandatud väljundsuunast ja konkreetsest kasutatavast toiteallikast. O/p liikumise suund on kas pöörlev või lineaarne. Üldiselt on need täiturmehhanismid väga võimsad, võrreldes elektromagnetiliste tüüpidega, mida kasutatakse suure pöördemomendiga rakendustes. Siin on teile küsimus, mis on täiturmehhanism?