
Nagu nimigi ütleb, annab see artikkel täpse ülevaate PID-kontrolleri struktuurist ja toimimisest. Üksikasjadesse laskudes olgem aga sissejuhatuseks PID-kontrollerite kohta. PID-regulaatoreid leidub tööstusprotsesside juhtimiseks paljudes rakendustes. Ligikaudu 95% ettevõtte suletud ahelaga toimingutest tööstusautomaatika sektoris kasutada PID-kontrollereid. PID tähistab proportsionaalset-integraalset tuletist. Need kolm kontrollerit on kombineeritud nii, et see annab juhtsignaali. Tagasiside kontrollerina annab see juhtimisväljundi soovitud tasemel. Enne mikroprotsessorite leiutamist rakendati PID-juhtimist analoogelektrooniliste komponentide abil. Kuid täna töötlevad mikroprotsessorid kõiki PID-kontrollereid. Programmeeritavad loogikakontrollerid teil on ka sisseehitatud PID-kontrolleri juhised. PID-kontrollerite paindlikkuse ja töökindluse tõttu kasutatakse neid tavapäraselt protsesside juhtimise rakendustes.
Mis on PID-kontroller?
Termin PID tähistab proportsionaalset integraalset tuletist ja see on üht tüüpi seade, mida kasutatakse erinevate protsessimuutujate, näiteks rõhu, voolu, temperatuuri ja kiiruse juhtimiseks tööstuslikes rakendustes. Selles kontrolleris kasutatakse kõigi protsessimuutujate reguleerimiseks juhtkontuuri tagasiside seadet.
Seda tüüpi juhtimist kasutatakse süsteemi juhtimiseks objektiivse asukoha suunas, mis on muidu tasane. Seda kasutatakse peaaegu kõikjal temperatuuri reguleerimiseks ja kasutatakse teadusprotsessides, automatiseerimisel ja lugematul hulgal kemikaalides. Selles kontrolleris kasutatakse suletud ahelaga tagasisidet, et säilitada meetodi tegelik väljund, nagu näiteks objektiivi lähedal, muidu võimaluse korral fikseeritud punktis. Selles artiklis käsitletakse PID-regulaatori disaini koos nendes kasutatavate juhtimisrežiimidega nagu P, I ja D.
Ajalugu
PID-regulaatori ajalugu on: Aastal 1911 töötas esimese PID-kontrolleri välja Elmer Sperry. Pärast seda rakendati TIC (Taylor Instrumental Company) endine pneumaatiline kontroller, mis oli täielikult häälestatav 1933. aastal. Mõne aasta pärast eemaldasid juhtimisinsenerid tasakaaluseisundi vea, mis leiti proportsionaalsetes kontrollerites, häälestades lõppu mõnele valeväärtusele, kuni viga ei olnud null.
See ümberhäälestus sisaldas viga, mida nimetatakse proportsionaalseks-integraalseks kontrolleriks. Pärast seda, 1940. aastal, töötati tuletise abil välja esimene pneumaatiline PID-kontroller, et vähendada ületamise probleeme.
1942. aastal võtsid Ziegler & Nichols kasutusele häälestusreeglid, et insenerid saaksid PID-kontrollerite sobivad parameetrid üles leida ja paika panna. Lõpuks kasutati 1950. aasta keskel tööstuses laialdaselt automaatseid PID-kontrollereid.
PID-kontrolleri plokkskeem
Suletud ahelaga süsteem nagu PID-kontroller sisaldab tagasiside juhtimissüsteemi. See süsteem hindab tagasisidemuutujat fikseeritud punkti abil veasignaali genereerimiseks. Selle põhjal muudab see süsteemi väljundit. Seda protseduuri jätkatakse seni, kuni viga jõuab nulli, vastasel juhul muutub tagasiside muutuja väärtus fikseeritud punktiga samaväärseks.
See kontroller annab häid tulemusi võrreldes ON / OFF tüüpi kontrolleriga. ON / OFF tüüpi kontrolleris on süsteemi haldamiseks võimalik saada lihtsalt kaks tingimust. Kui protsessi väärtus on fikseeritud punktist madalam, lülitub see sisse. Samamoodi lülitub see välja, kui väärtus on suurem kui fikseeritud väärtus. Sellise kontrolleri väljund ei ole stabiilne ja see kõigub sageli fikseeritud punkti piirkonnas. See kontroller on aga ON / OFF tüüpi kontrolleriga võrreldes stabiilsem ja täpsem.

PID-kontrolleri töö
PID-kontrolleri töö
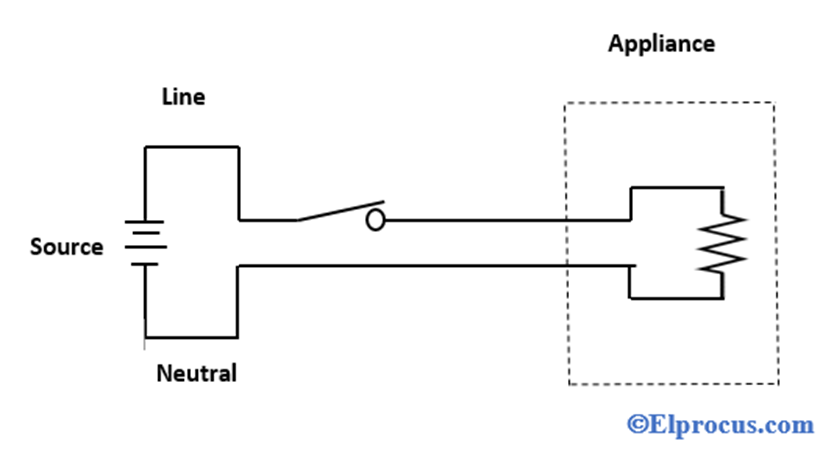
Odava lihtsa ON-OFF kontrolleri kasutamisel on võimalik ainult kaks juhtimisolekut, näiteks täielikult ON või OFF. Seda kasutatakse piiratud juhtimisrakenduse jaoks, kus neist kahest juhtimisolekust piisab juhtimise eesmärgi saavutamiseks. Kuid selle juhtimise võnkuv olemus piirab selle kasutamist ja seetõttu asendatakse see PID-kontrolleritega.
PID-kontroller hoiab väljundit nii, et suletud ahelaga toimingute korral on protsessimuutuja ja seadepunkti / soovitud väljundi vahel nullviga. PID kasutab kolme põhilist juhtimiskäitumist, mida on allpool selgitatud.
P- kontroller
Proportsionaalne või P- kontroller annab väljundi, mis on proportsionaalne voolu veaga e (t). See võrdleb soovitud või seatud punkti tegeliku väärtuse või tagasiside protsessi väärtusega. Saadud viga korrutatakse väljundi saamiseks proportsionaalse konstandiga. Kui vea väärtus on null, siis see kontrolleri väljund on null.

P-kontroller
See kontroller vajab eraldi kasutamisel kallutamist või käsitsi lähtestamist. Seda seetõttu, et see ei saavuta kunagi püsiseisundit. See tagab stabiilse töö, kuid säilitab alati püsiva oleku vea. Vastuse kiirust suurendatakse, kui proportsionaalne konstant Kc suureneb.

P-kontrolleri vastus
Mina-kontroller
Tulenevalt p-kontrolleri piirangust, kus protsessimuutuja ja seadepunkti vahel on alati nihe, on vaja I-kontrollerit, mis annab vajalikud meetmed püsiseisundi vea kõrvaldamiseks. See integreerib vea teatud aja jooksul, kuni vea väärtus jõuab nulli. See hoiab lõpliku juhtimisseadme väärtust, mille juures viga saab nulliks.

PI kontroller
Integreeritud juhtimine vähendab väljundit, kui toimub negatiivne viga. See piirab reageerimise kiirust ja mõjutab süsteemi stabiilsust. Vastuse kiirust suurendatakse integraalse võimenduse vähenemise Ki abil.

PI kontrolleri vastus
Ülaltoodud joonisel väheneb I-kontrolleri võimenduse vähenemisel ka püsiseisundi viga. Enamikul juhtudel kasutatakse PI-kontrollerit eriti seal, kus kiiret reageerimist pole vaja.
PI-kontrolleri kasutamisel on I-kontrolleri väljund piiratud ületamiseks lahutamatu lõpetamine tingimused, kus integraalväljund suureneb isegi nullvea olekus jaama mittelineaarsuse tõttu.
D-kontroller
I-kontrolleril pole võimalust vea käitumist tulevikus prognoosida. Nii et see reageerib normaalselt, kui seadepunkti muudetakse. D-kontroller ületab selle probleemi, ennetades vea käitumist tulevikus. Selle väljund sõltub vea muutumise kiirusest aja suhtes, korrutatuna tuletise konstandiga. See annab väljundile alguse, suurendades seeläbi süsteemi reaktsiooni.

PID-kontroller
D ülaltoodud joonisel reageerib kontroller PI-kontrolleriga võrreldes rohkem ja ka väljundi settimisaeg väheneb. See parandab süsteemi stabiilsust, kompenseerides I-kontrolleri põhjustatud faaside mahajäämust. Tuletisvõimendi suurendamine suurendab reageerimise kiirust.

PID-kontrolleri vastus
Lõpuks täheldasime, et nende kolme kontrolleri ühendamisel võime saada süsteemi jaoks soovitud vastuse. Erinevad tootjad kujundavad erinevaid PID-algoritme.
PID-kontrolleri tüübid
PID-regulaatorid on jaotatud kolme tüüpi nagu ON / OFF, proportsionaalsed ja standardsed regulaatorid. Neid kontrollereid kasutatakse juhtimissüsteemi põhjal, kasutaja saab meetodi reguleerimiseks kasutada kontrollerit.
ON / OFF juhtimine
On-off juhtimismeetod on lihtsaim temperatuuri reguleerimiseks kasutatav seade. Seadme väljund võib olla sisse / välja lülitatud ilma keskolekuta. See regulaator lülitab väljundi sisse lihtsalt siis, kui temperatuur ületab fikseeritud punkti. Piirikontroller on üks kindlat tüüpi ON / OFF kontroller, mis kasutab lukustusreleed. See relee lähtestatakse käsitsi ja seda kasutatakse meetodi väljalülitamiseks, kui teatud temperatuur on saavutatud.
Proportsionaalne kontroll
Selline regulaator on mõeldud sisselülitamise / väljalülitamise kaudu ühendatud tsükli eemaldamiseks. See PID-regulaator vähendab normaalset võimsust, mis antakse kütteseadme poole, kui temperatuur jõuab fikseeritud punkti.
Sellel kontrolleril on üks funktsioon kütteseadme juhtimiseks nii, et see ei ületaks fikseeritud punkti, kuid püsiva temperatuuri hoidmiseks jõuab see fikseeritud punktini.
Selle proportsioonitegemise saab saavutada väljundi sisse- ja väljalülitamisega väikesteks perioodideks. Selle ajaga proportsioonide muutmine muudab temperatuuri reguleerimise suhteks sisselülitatud aja ja väljalülitatud aja vahel.
Standard tüüpi PID-kontroller
Selline PID-kontroller ühendab integreeritud ja tuletatud juhtimise abil proportsionaalse juhtimise, et aidata seadmel automaatselt süsteemi muudatusi kompenseerida. Need modifikatsioonid, integraal ja tuletis väljendatakse ajapõhistes ühikutes.
Nendele kontrolleritele osutatakse ka nende vastastikuste, vastavalt RATE & RESET kaudu. PID-i tingimusi tuleb kohandada eraldi, muidu häälestatakse need prooviversiooniga konkreetsele süsteemile, samuti viga. Need kontrollerid pakuvad kolme tüüpi kontrolleritest kõige täpsemat ja stabiilsemat juhtimist.
Reaalajas PID-kontrollerid
Praegu on turul saadaval mitmesuguseid PID-kontrollereid. Neid regulaatoreid kasutatakse tööstuslikuks juhtimiseks, näiteks rõhu, temperatuuri, taseme ja voolu jaoks. Kui neid parameetreid on PID-ga kontrollitud, kasutatakse valikutes eraldi PID-kontrollerit või kas PLC-d.
Neid eraldi kontrollereid kasutatakse kõikjal, kus muul juhul on vaja kontrollida kahte ahelat, samuti kontrollida neid muul viisil tingimustes, kus suuremate süsteemide kaudu sisenemise õigus on keeruline.
Need juhtimisseadmed pakuvad erinevaid valikuid soolo- ja kaksikjuhtimise juhtimiseks. Eraldi tüüpi PID-kontrollerid pakuvad mitut fikseeritud punkti konfiguratsiooni, et tekitada autonoomsed mitmed häired.
Need eraldiseisvad kontrollerid koosnevad peamiselt Honeywelli PID-kontrolleritest, Yokogawa temperatuuri regulaatoritest, OMEGA, Siemensi ja ABB kontrollerite autotune kontrolleritest.
PLC-sid kasutatakse enamikus tööstuslikes juhtimisrakendustes nagu PID-regulaatoreid. PID-plokkide paigutus võib toimuda PAC-ide või PLC-de sees, et anda täpse PLC-juhtimise jaoks paremad valikud. Need kontrollerid on nutikamad ja võimsamad kui eraldi kontrolleritega võrreldes. Iga PLC sisaldab PID-plokki tarkvara programmeerimisel.
Häälestusmeetodid
Enne PID-kontrolleri tööd tuleb see häälestada vastavalt juhitava protsessi dünaamikale. Disainerid annavad P-, I- ja D-terminite vaikeväärtused ning need väärtused ei suutnud anda soovitud jõudlust ning toovad mõnikord kaasa ebastabiilsuse ja aeglase juhtimise. PID-regulaatorite häälestamiseks on välja töötatud erinevat tüüpi häälestusmeetodid, mis nõuavad operaatorilt palju tähelepanu proportsionaalse, integraalse ja tuletatud kasumi parimate väärtuste valimiseks. Mõned neist on toodud allpool.
PID-regulaatoreid kasutatakse enamikus tööstuslikes rakendustes, kuid peaksite teadma selle regulaatori seadeid, et seda eelistatud väljundi loomiseks õigesti reguleerida. Siin pole häälestamine muud kui kontrollerilt ideaalse vastuse saamise protseduur parimate proportsionaalsete kasumite, integraalsete ja tuletistegurite seadmise kaudu.
PID-regulaatori soovitud väljundi saab saada regulaatori häälestamisega. Kontrollerilt nõutava väljundi saamiseks on saadaval erinevad meetodid, näiteks katse ja viga, Zeigler-Nichols ja protsessi reaktsioonikõver. Kõige sagedamini kasutatavad meetodid on katse-eksituse meetod, Zeigler-Nichols jne.
Katse- ja veameetod: See on PID-kontrolleri häälestamise lihtne meetod. Süsteemi või kontrolleri töötamise ajal saame kontrollerit häälestada. Selles meetodis peame kõigepealt seadistama Ki ja Kd väärtused nulli ning suurendama proportsionaalset terminit (Kp), kuni süsteem jõuab võnkekäitumiseni. Kui see on võnkuv, reguleerige Ki (integreeritud termin) nii, et võnked peatuksid ja lõpuks reguleerige D, et saada kiire reageering.
Protsessi reaktsioonikõvera tehnika: See on avatud tsükli häälestamise tehnika. See annab vastuse, kui süsteemile rakendatakse astmelist sisendit. Esialgu peame süsteemi mõningaid juhtväljundeid käsitsi rakendama ja reageerimiskõvera registreerima.
Pärast seda peame arvutama kalle, surnud aeg, kõvera tõusuaeg ja lõpuks asendama need väärtused P, I ja D võrrandites, et saada PID-terminite võimendusväärtused.

Protsessi reaktsioonikõver
Zeigler-Nicholsi meetod: Zeigler-Nichols pakkus välja suletud ahela meetodid PID-kontrolleri häälestamiseks. Need on pidev tsüklimeetod ja summutatud võnkemeetod. Mõlema meetodi protseduurid on ühesugused, kuid võnkekäitumine on erinev. Selles peame kõigepealt seadistama p-kontrolleri konstandi Kp konkreetsele väärtusele, samas kui Ki ja Kd väärtused on null. Proportsionaalset võimendust suurendatakse kuni süsteemi võnkumiseni konstantsel amplituudil.
Võimendust, mille korral süsteem tekitab püsivaid võnkeid, nimetatakse lõplikuks võimenduseks (Ku) ja võnkumiste perioodi lõplikuks perioodiks (Pc). Kui see on saavutatud, võime sisestada P, I ja D väärtused PID-kontrollerisse Zeigler-Nicholsi tabelis, sõltuvalt kasutatavast kontrollerist nagu P, PI või PID, nagu allpool näidatud.

Zeigler-Nicholsi tabel
PID-kontrolleri struktuur
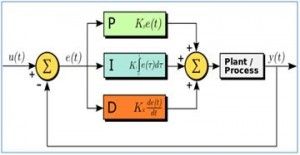
PID-kontroller koosneb kolmest terminist, nimelt proportsionaalne, integraalne ja tuletisjuhtimine. Nende kolme kontrolleri ühine töö annab juhtimisstrateegia protsessi juhtimiseks. PID-regulaator manipuleerib protsessimuutujatega nagu rõhk, kiirus, temperatuur, vooluhulk jne. Mõned rakendused kasutavad PID-regulaatoreid kaskaadvõrkudes, kus juhtimise saavutamiseks kasutatakse kahte või enamat PID-d.

PID-kontrolleri struktuur
Ülaltoodud joonis näitab PID-kontrolleri struktuuri. See koosneb PID-plokist, mis annab väljundi protsessiplokile. Protsess / tehas koosneb lõplikest juhtimisseadmetest nagu täiturid, juhtventiilid ja muud juhtimisseadmed tööstuse / tehase erinevate protsesside juhtimiseks.
Protsessitehase tagasiside signaali võrreldakse seadepunkti või võrdlussignaaliga u (t) ja vastav veasignaal e (t) suunatakse PID-algoritmi. Algoritmis olevate proportsionaalsete, integraalsete ja tuletatud juhtimisarvutuste kohaselt tekitab kontroller kombineeritud reaktsiooni või juhitava väljundi, mida rakendatakse taime juhtimisseadmetele.
Kõik juhtimisrakendused ei vaja kõiki kolme juhtelementi. Praktilistes rakendustes kasutatakse väga sageli selliseid kombinatsioone nagu PI ja PD.
Rakendused
PID-kontrolleri rakendused sisaldavad järgmist.
Parim PID-regulaatori rakendus on temperatuuri reguleerimine, kus regulaator kasutab temperatuurianduri sisendit ja selle väljundit saab ühendada juhtimiselemendiga nagu ventilaator või kütteseade. Üldiselt on see regulaator lihtsalt üks temperatuuri reguleerimissüsteemi elementidest. Õige kontrolleri valimisel tuleb nii kogu süsteemi uurida kui ka sellega arvestada.
Ahju temperatuuri reguleerimine
Üldiselt kasutatakse ahjusid nii kütte jaoks kui ka mahutamiseks tohutul hulgal toorainet tohututel temperatuuridel. On tavaline, et hõivatud materjal sisaldab tohutut massi. Järelikult võtab see suure hulga inertsit ja materjali temperatuur ei muutu kiiresti isegi tohutu kuumuse korral. Selle funktsiooni tulemuseks on mõõdukalt stabiilne PV-signaal ja see võimaldab tuletisperioodil tõrkeid tõhusalt parandada ilma FCE või CO äärmuslike muutusteta.
MPPT laadimiskontroller
Fotogalvaanilise elemendi V-I omadus sõltub peamiselt temperatuuri vahemikust ja kiirgusest. Ilmaolude põhjal muutuvad voolu ja tööpinge pidevalt. Seega on äärmiselt oluline jälgida tõhusa fotogalvaanilise süsteemi kõrgeimat PowerPointi. PID-kontrollerit kasutatakse MPPT leidmiseks, andes PID-kontrollerile fikseeritud pinge- ja voolupunktid. Kui ilmastikutingimusi muudetakse, hoiab jälgija voolu ja pinget stabiilsena.
Jõuelektroonika muundur
Me teame, et muundur on jõuelektroonika rakendus, seega muundurites kasutatakse enamasti PID-kontrollerit. Alati, kui muundurit ühendatakse süsteemi kaudu koormuse muutuse põhjal, muudetakse muunduri väljundit. Näiteks on inverter koormusega seotud, tohutu vool antakse peale koormuste suurendamist. Seega pole nii pinge kui ka voolu parameeter stabiilne, kuid see muutub vastavalt nõudele.
Selles olekus genereerib see kontroller PWM-signaale inverteri IGBT-de aktiveerimiseks. Koormuse muutuse põhjal edastatakse PID-kontrollerile vastussignaal, nii et see tekitab n viga. Need signaalid genereeritakse rikke signaali põhjal. Selles olekus saame sarnase inverteri kaudu muutuva sisendi ja väljundi.
PID-kontrolleri rakendus: Suletud ahelaga juhtimine harjadeta alalisvoolumootorile
PID-kontrolleri liidestamine
PID-kontrolleri kujunduse ja liidestamise saab teha Arduino mikrokontrolleri abil. Laboris on Arduino-põhine PID-kontroller loodud Arduino UNO-plaadi, elektrooniliste komponentide, termoelektrilise jahuti abil, samas kui selles süsteemis kasutatavad tarkvara programmeerimiskeeled on C või C ++. Seda süsteemi kasutatakse temperatuuri kontrollimiseks laboris.
Konkreetse kontrolleri PID parameetrid leitakse füüsiliselt. Erinevate PID-parameetrite funktsiooni saab rakendada järgneva kontrasti abil erinevate kontrollerite vahel.
See liidesesüsteem suudab temperatuuri tõhusalt arvutada veaga ± 0,6 ℃, samal ajal kui püsiv temperatuur reguleeritakse lihtsalt väikese erinevusega eelistatud väärtusest. Selles süsteemis kasutatavad mõisted pakuvad nii odavaid kui ka täpseid tehnikaid füüsikaliste parameetrite haldamiseks laboris eelistatud vahemikus.
Seega käsitletakse selles artiklis ülevaadet PID-kontrollerist, mis sisaldab ajalugu, plokkskeemi, struktuuri, tüüpe, tööd, häälestusmeetodeid, liidestusi, eeliseid ja rakendusi. Loodame, et oleme suutnud anda põhilisi, kuid täpseid teadmisi PID-kontrollerite kohta. Siin on lihtne küsimus teile kõigile. Millist meetodit PID-kontrolleri optimaalse töö saavutamiseks eelistatavalt kasutatakse erinevate häälestusmeetodite seas ja miks?
Teil palutakse oma vastused anda allpool olevas kommentaaride jaotises.
Foto autorid
PID-kontrolleri plokkskeem wikimedia
PID-kontrolleri struktuur, P-kontroller, P - kontrolleri vastus ja PID-kontroller blog.opticontrols
P - kontrolleri vastus kontrollib.mootor.umich
PI - kontrolleri vastus m. sööma
PID-kontrolleri vastus wikimedia
Zeigler-Nicholsi tabel juhtelemendid.mootor






{kind=link}
{kind=link}
{kind=link}
{kind=link}