
Tehnoloogia areng on välja töötanud intelligentse inimese ja masina vahelise liidese tehnika, mis hõlbustab arvutite või masinate või robotite juhtimist inimese häälkäskluste abil ilma sisendsüsteeme, nagu klaviatuurid või hiir. Selle inimese ja masina liidese (HMI) saab saavutada kasutades hääletuvastus moodulid. Selles artiklis käsitleme hääletuvastuse mooduleid koos nende tööprotseduuride ja rakendustega.

Häälmoodul
Hääletuvastuse moodul
Häältuvastus on tehnika, mis hõlbustab loomulikku ja mugavat inimese ja masina liides kasutades hääletuvastuse moodulit. See eraldab ja analüüsib mikrofoni kaudu masinasse või arvutisse toimetatud inimese hääleomadusi. Häältuvastustehnika liigitatakse mitmesse tüüpi, lähtudes erinevatest kriteeriumidest, nagu kasutajate ulatus, mitmed äratundmiseks kasutatud sõnad, rääkimise loomulikkus. Kui hääletuvastuse tase on üle 95%, kasutatakse praktiliselt ainult hääletuvastust.
Hääletuvastuse mooduli tööpõhimõte
HM2007 on ühe kiibiga CMOS hääletuvastuse moodul. See on kiibil olev analoog esiotsa suuremahuline integreeritud vooluahel koos häälanalüüsi, kõnetuvastuse ja hääletuvastussüsteemi juhtimisprotsessidega. HM2007 saab kasutada kahes režiimis: käsitsi režiimis ja protsessori juhtimisrežiimis.

HM2007 tihvtide skeem
Manuaalses töörežiimis kasutatakse hääletuvastuse moodulit HM2007 lihtsa tuvastussüsteemi ehitamiseks, ühendades sellised komponendid nagu klaviatuur, 8Kbyte-suuruse mälu SRAM ja muud komponendid. Kui toide on sisse lülitatud, alustab HM2007 initsialiseerimisprotsessi ja kui WAIT-nööpnõel on L, kontrollib HM2007 välismälu: 8Kbyte SRAM - kas see on täiuslik või mitte. Kuid kui WAIT on H, jätab HM2007 mälu kontrollimise protsessi vahele. Pärast seda lähtestamisprotsessi liigub HM2007 tuvastamisrežiimi. Kui WAIT-tihvt on äratundmisrežiimis, on HM2007 hääl aktsepteerimiseks valmis ja alustab tuvastamisprotsessi. Kui WAIT-nööpnõel on L, siis HM2007 ei aktsepteeri äratuntavat häält. Uute mustrite treenimine treenitud mustrite kustutamise kaudu on kaks toimingut, mida tehakse funktsiooniklahvide abil: TRN ja CLR. Kõiki HM2007 mustreid saab kustutada, sisestades numbriklahvi 99 ja vajutades CLR.
Protsessori juhtimisrežiimis pakutakse selles režiimis mitut funktsiooni, näiteks TUTVUSTAMINE, TRAIN, TULEMUS, ÜLESLAADIMINE, ALLAATAMINE, NULLITAMINE. Sarnaselt manuaalsele töörežiimile tehakse ka selles režiimis sisselülitamine, tuvastamine, treenimine, tulemuste, üleslaadimise, allalaadimise ja lähtestamise toimingud erinevate kriteeriumide alusel.
Hääletuvastuse mooduli rakendused
Hääljuhitav robotsõiduk

Hääljuhitavate robotsõidukite projektikomplekt
Hääljuhitav robotsõiduk koos kaugkõne tuvastamise süsteemiga on loodud juhtimiseks, kasutades robot-sõiduki kaugjuhtimiseks inimese-masina liidest ja häälkäsklusi. An 8051 mikrokontroller kasutatakse soovitud toimingu saavutamiseks koos hääletuvastuse mooduli või kõnetuvastusmooduliga. Robotisõiduki liikumissuunda saab juhtida häälkäskluste või vajutusnuppude abil. Häälkäsklused saadetakse RF poolt edastavast otsast vastuvõtva otsa poole. Seega liigub robotiseeritud sõiduk vastuvõtja saadud käskude põhjal edasi, tagasi, vasakule või paremale.

Saatja plokkskeem hääljuhtimisega robotsõidukist
See liikumine robot sõiduk kindlas suunas saab juhtida kahe mootori abil, mis on liidetud seeria 8051 mikrokontrolleriga. RF-saatja teisendab käsklused lülitivajutusega või häälkäsklustega, mis teisendatakse kodeeritud digitaalseks andmekoguseks robot-sõidukist vastuvõetava kauguse (kuni 200 meetri) kasuks. Vastuvõtja ahelas vastuvõetud kodeeritud andmed dekodeeritakse saatmiseks teisele mikrokontrollerile alalisvoolumootorite juhtimiseks, kasutades mootori draiveri IC-d mootorite suuna ja liikumise juhtimiseks, kasutades häälkäskude dekodeeritud andmeid.

Hääljuhitava robotiga sõiduki vastuvõtja plokkskeem
Seda hääljuhitavat robotsõidukit koos kaugekõne tuvastamise projektidega saab integreerida a DTMF-tehnoloogia mis hõlbustab robotisõiduki juhtimist mobiiltelefoni abil. See DTMF-tehnoloogia tagab raadiosagedustehnoloogiaga väga pika side - seega saab robotiga sõidukeid juhtida kaugelt väga pika vahemaa tagant.
Helisalvestus- ja taasesitusahel
APR 9301 IC

APR 9301 IC
Aprill 9301 IC koosneb 28 tihvtist ja püsimälust. See hõlbustab 100K tsükli salvestamist ja mälu salvestamist umbes 100 aasta jooksul. APR 9301 integraallülituse normaalseks tööks on vaja ainult madalpinge 5V ja 25mA voolu.
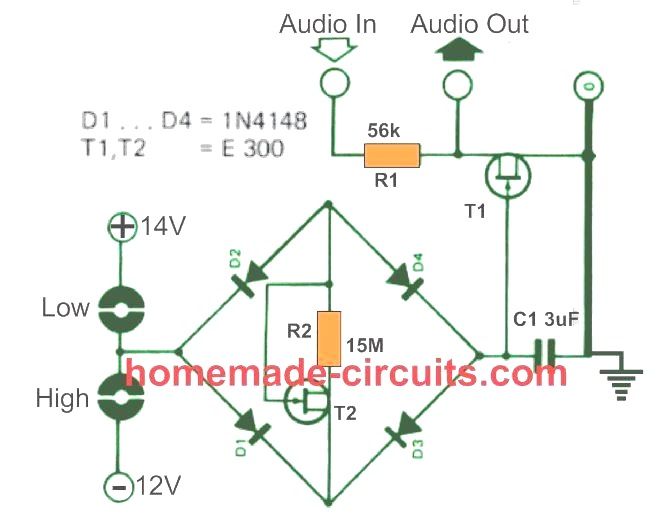
Helisalvestus- ja taasesitusahelate töö
Toimib APR 9301 IC helisalvestus ja taasesitus toimingud. Salvestustoimingut saab teha kõnesignaalide vastuvõtmisega, kasutades hea kvaliteediga (mis tahes liiki) kondensaatormikrofoni, mis on ühendatud integraallülituse 17 ja 18 tihvtiga. Kui sulgeme lüliti S1, saab helirežiimi hõlpsaks salvestamiseks 20–30 sekundiks salvestusrežiimi käivitada. APR 9301 IC tihvtiga 25 ühendatud LED-i signaaltuli vilgub seni, kuni L-tihvt 27 on maandatud.

Helisalvestus- ja taasesitusahel
Pärast 20 tsükli lõppemist viimase mäluga lõpeb salvestusprotsess automaatselt, muutes APR 9301 IC kontaktidega 6 ja 7 ühendatud takisti R1 väärtust. Maksimaalse salvestusaja kestuse 20 sekundit, 24 sekundit ja 30 sekundit võib saada, muutes takisti R1 väärtuseks vastavalt 52K, 67K ja 89K.
Sisendosa vaigistatakse taasesitusrežiimi ajal automaatselt. Kui lüliti S2 on suletud, tuleb kõlarist sõnum salvestatud sõnumite algusest peale. Kui salvestus- või taasesitusfunktsioonid on lõpule viidud, lülitub APR 9301 IC ooterežiimi.
Selle vooluahela saab akumuleerida ühisele PCB-le. Jootke APR 9301 IC alus hoolikalt, nii et integraallülituse tihvtide vahel ei tohiks tekkida lühist. Kontrollige vooluahelat pärast selle kokkupanemist PCB-le ja seejärel ühendage IC IC-i alusega. Enne vooluallikale andmist kontrollige hoolikalt tihvtide ühendusi. 5-voldise regulaatori IC-põhist toiteallikat kasutatakse vooluahela toitmiseks. Selge heli saamiseks kasutatakse 2-tollist 8-oomi kvaliteetset kõlarit. Salvestamiseks saab vajutada lülitit S1. Helisignaalid (kõne või muusika) võtab mikrofon ja edastab need IC-le, kus kõnesignaalid salvestatakse mälurakkudesse. Kui sulgeme lüliti S2, algab taasesitus ja kuuleme salvestatud sõnumit kõlari kaudu.
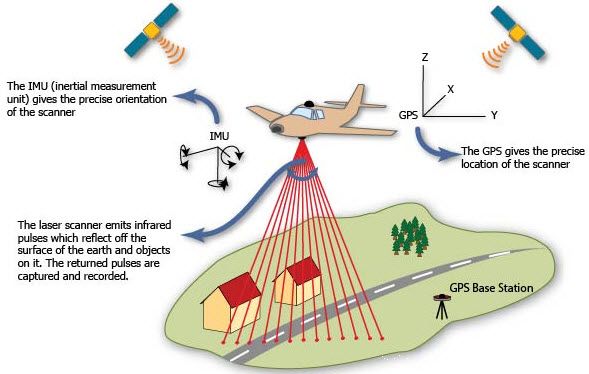
Häältuvastuse moodulit saab kasutada paljudes rakendustes, näiteks õhusõidukisüsteemide juhtimiseks pilootide häälkäskluste abil, mootoriga rooliauto juhtimiseks hääle abil aktiveeritava multiprotsessori abil jne. Kui olete huvitatud elektri- ja elektroonikaprojektid põhineb hääletuvastuse moodulil, siis võite pöörduda meie poole, postitades oma kommentaarid allpool olevasse kommentaaride jaotisesse.
Foto autorid:
- APR 9301 IC elektroskemaatika
- HM 2007 emartee





{kind=link}