Selles projektis õpime, kuidas teha lihtsat ühepolaarset samm-mootori juhtsüsteemi, kasutades taimeri 555 IC. Peale 555 taimeri vajame ka IC CD 4017, mis on kümnendi loendur IC.
Autor Ankit Negi
Selle ahelaga saab konkreetse ülesande täitmiseks ühendada mis tahes unipolaarse mootori, kuigi kõigepealt peate tegema mõned väikesed muudatused.
Samm-mootori kiirust saab reguleerida tühjenemise ja künnise vahele ühendatud potentsiomeetri abil tihvt 555 taimeriga .
Stepper Motor põhitõed
Astmemootoreid kasutatakse piirkondades, kus on vaja konkreetset pöörlemissummat, mida ei saa saavutada tavaliste vahelduvvoolumootorite abil. Sammmootori tüüpiline rakendus on 3D-PRINTER. Leiate kahte tüüpi populaarseid samm-mootoreid: UNIPOLAR ja BIPOLAR.
Nagu nimigi ütleb, sisaldab unipolaarne samm-mootor ühise juhtmega mähiseid, mida saab ükshaaval hõlpsalt pingestada.
Bipolaarsel samm-mootoril ei ole rullide vahel ühist klemmi, mille tõttu seda ei saa juhtida lihtsalt pakutava vooluahela abil. Bipolaarse samm-mootori juhtimiseks vajame h-silla vooluahelat.
KOMPONENDID:
1. 555 TAIMERI IC

kaks. CD 4017 IC

3. Takistid 4,7K, 1K


4. POTENTIOMEETER 220K

5. 1 kondensaator

6. 4 DIODI 1N4007

7. 4 transistorit 2N2222

8. UNIPOLAARNE STEPMOTOR

9. Alalisvooluallikas
EESMÄRK 555 TAIMER:
Siin on vaja 555 taimerit, et genereerida konkreetse sagedusega kellimpulsse (saab muuta 220 k poti abil), mis määrab samm-mootori kiiruse.
IC 555 Pinouti üksikasjad

CD4017 EESMÄRK:
Nagu juba eespool mainitud, on see kümnendi loendur IC, st see võib loendada kuni 10 taktimpulssi. Selle IC muudab eriliseks see, et sellel on oma sisseehitatud dekooder. Tänu sellele ei pea te kahendarvude dekodeerimiseks lisama täiendavat IC-d.
4017 loendab kuni 10 kellaimpulssi alates 555 tundi ja annab suure väljundi, mis vastab igale kella impulsile ükshaaval selle 10 väljundnõelalt. Korraga on kõrgel ainult üks tihvt.
TRANSISTORITE EESMÄRK:
Siin on transistoril kaks eesmärki:
1. Transistorid toimivad siin nagu lülitid, andes nii ühe mähise korraga energiat.
2. Transistorid võimaldavad suure voolu läbida neid ja seejärel mootorit, välistades seega täielikult taimeri 555, kuna see suudab anda väga vähe voolu.
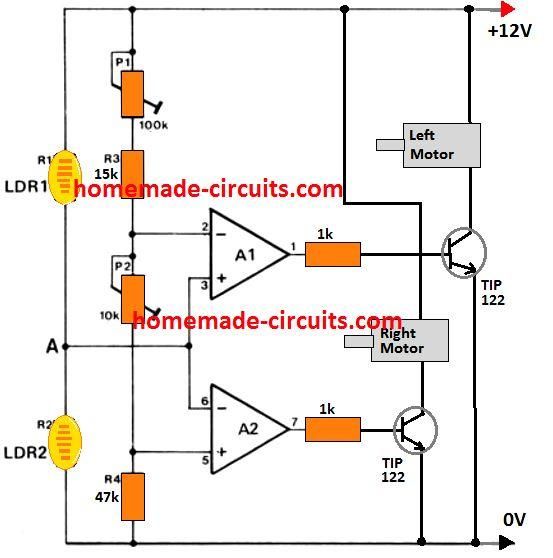
VÖÖDIAGRAMM:

Looge ühendused, nagu on näidatud joonisel.
1. Ühendage taimeri nööpnõel 555 või väljundnupp IC 4017 tihvtiga 14 (kellanõel).
2. Ühendage 4017 lubamisnõel või 13. tihvt maandusega.
3. Ühendage tihvtid 3,2,4,7 ükshaaval vastavalt transistoridega 1,2,3,4.
4. Ühendage 10 ja 15. tihvt maandusega läbi 1k takisti.
5. Ühendage samm-mootori ühine juhe toiteallikaga.
6. Ühendage muud samm-mootori juhtmed nii, et mähised saaksid ükshaaval pinge, et üks täispöörde korralikult läbi viia. (Võite vaadata tootja antud mootori andmelehte)
MIKS ON IC 4017 VÄLJUNDI PIN 10 ühendatud PIN 15-ga (NULLITA PIN-kood)?
Nagu juba eespool mainitud, loeb 4017 taktimpulsse ükshaaval kuni kümnenda taktsimpulssini ja annab vastavalt väljundnõeltele suure väljundi, iga väljundnõel läheb kõrgeks.
See põhjustab mootori pöörlemises teatavat viivitust, mis on tarbetu. Kuna mootori ühe täieliku pöörde jaoks vajame ainult nelja esimest tihvti või nelja esimese kümnendarvu vahemikus o kuni 3, siis tihvt nr. 10 on ühendatud tihvtiga 15 nii, et pärast neljandat loendamist IC lähtestatakse ja loendamine algab uuesti algusest. See tagab, et mootori pöörlemine ei katke.
TÖÖTAMINE:
Pärast ühenduste nõuetekohast sisselülitamist hakkab vooluahela mootor sammhaaval pöörlema. Taimer 555 toodab taktimpulsse sõltuvalt takisti, potentsiomeetri ja kondensaatori väärtustest.
Kui muudate nende kolme komponendi väärtust, muutub pulsi sagedus.
Need kellaimpulsid antakse IC CD-le 4017, mis loeb taktimpulsid ükshaaval ja annab 1 väljundina vastavalt kontaktile nr 3,2,4,7 ja kordab seda protsessi pidevalt.
Kuna transistor Q1 on ühendatud tihvtiga 3, lülitub see kõigepealt sisse, seejärel transistor Q2, millele järgnevad Q3 ja Q4. Kuid kui üks transistor on sisse lülitatud, jäävad teised välja.
Kui Q1 on sisse lülitatud, toimib see nagu suletud lüliti ja vool voolab läbi ühise traadi juhtmele 1 ja seejärel maandub läbi transistori Q1.
See annab poolile 1 energiat ja mootor pöörleb teatud nurga all, mis sõltub kella sagedusest. Siis juhtub sama asi Q2-ga, mis annab pinge poolile 2, millele järgnevad rull 3 ja mähis 4. Nii saadakse üks täielik pöörete arv.
Potentsiomeetri pööramisel:
Oletame, et poti esialgne asend on selline, et tühjendus- ja läve tihvti vahel on maksimaalne takistus (220k). Väljundkella impulsi sageduse valem on:
F = 1,44 / (R1 + 2R2) C1
Valemist on selge, et taktimpulsside sagedus väheneb, kui R2 väärtus suureneb. Seega, kui R2 või poti väärtus on maksimaalne, on sagedus minimaalne, mille tõttu IC 4017 loeb aeglasemalt ja annab rohkem viivitatud väljundit.
Kui takistuse R2 väärtus väheneb, suureneb sagedus, mis põhjustab minimaalse viivituse IC 4017 väljundite vahel. Seega samm-mootor pöörleb kiiremini.
Seega määrab potentsiomeetri väärtus samm-mootori kiiruse.
SIMULATSIOONIVIDEO:
Siin on selgelt näha, kuidas mootori kiirus varieerub takistusega R2. Selle väärtust kõigepealt vähendatakse ja seejärel suurendatakse, mis omakorda suurendab ja seejärel vähendab samm-mootori kiirust.
Eelmine: Kuidas väntlambid töötavad Järgmine: Arduino tahhomeetri ahel täpsete lugemite jaoks