Artiklis selgitatakse lihtsat liinijärgse sõiduki vooluringi, mida nimetatakse ka liinijälgimissõidukiks, kasutades vaid paari op-amprit ja mõnda muud komponenti, ilma keerulisi Arduino või mikrokontrollereid kasutamata.
Mis on liinijärgne sõiduk
Liinijärgne sõiduk on automaatjuhitava sõiduki (AGV) vorm, mis sõidab maapinnale tõmmatud või kinnitatud valge joone tuvastamisega. Detektorite signaal käsib mootoriga ratastel automaatselt pöörata ja vastavalt joonele reguleerida, jättes mulje, et sõiduk järgib joont. Sellest ka nimerea järgija.
Põhimõtteliselt on detektorid kujul fototakistid, näiteks LDR-id või pooljuhtide valgusdetektorid nagu fotodioodid või fototransistorid .
Paar sellist valgusdetektorid Kasutatakse valgelt joonelt peegeldunud valguse tuvastamiseks ja transistoreeritud vooluahela või op-võimendil põhinevate komparaatorite lülitamiseks, mis omakorda juhivad sõiduki rattamootoreid manööverdamiseks vastavalt maapinnal oleva valge joone pööretele ja kõveratele.
Aknavõrdlejate kasutamine
Pakutud liinijärgse sõiduki ringrajas oleme kasutanud paari op amp võrdlejad oli mootorite kaasamine tasakaalustamisse.
Op-võimendid on varustatud aknaga jagajad . Nagu nimest võib järeldada, võrdleb akna võrdleja detektorite sisendsignaali kahe äärmise pinge võrdlusega, mis moodustavad 'akna' künnised. Niikaua kui sisendsignaali tase jääb selle „akna” võrdlusläve piiridesse, säilitab mõlema op-võimendi väljund oma väljundites kõrge loogika.
Kuid juhul, kui sisendsignaal kipub ületama võrdlusläve, muutub vastav op-võimendi väljund madalaks, mille tulemuseks on op-amprite vastandlikud väljundid. See tasakaalustamatus sunnib väljundseadmeid koormust sobivalt ümber lülitades olukorda parandama.
Kuidas vooluring töötab
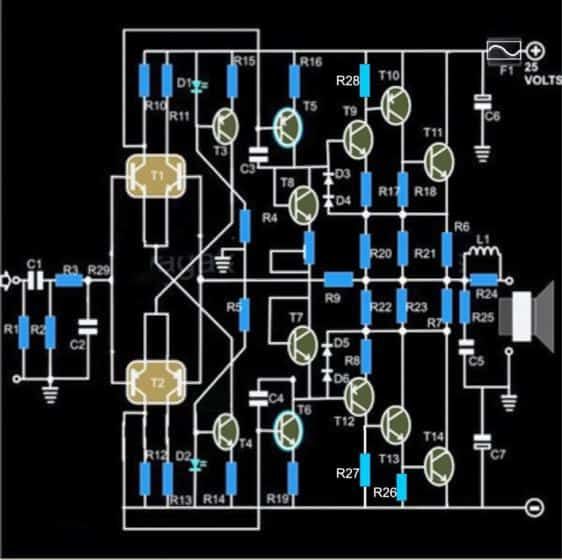
Viidates allpool toodud liinijärgsõiduki skeemile, näeme kahte op-amprit, mis on konfigureeritud aknakompartoriteks.

Opvõimendid võivad olla pärit IC-st LM358 või LM324
Ülemine op-võimendi on juhtmega ühendatud ülemise künnispiiri juhtimiseks, samas kui alumine op-võimendi on ühendatud alumise künnispiiri juhtimiseks.
Opvõimendi A1 inverteeriv sisend ja opvõimendi A2 mitteinverteeriv sisend kinnitatakse fikseeritud tugipingega
Opvõimendi A1 mitteinverteeriv sisend ja opvõimendi A2 inverteeriv sisend seotakse kokku ja neid kasutatakse valgusdetektorite sisendsignaali variatsioonide tuvastamiseks.
Kaks valgust sõltuvat takistit, LDR1 ja LDR2, mis toimivad nagu valgustundlikud seadmed, on paigutatud valgusdetektoritena nii, et nad võtaksid valgelt joonelt peegeldunud valguse ühtlaselt vastu.
Kuni LDR-de valgus on piisavalt kõrge ja ühtlane, jääb A1 pin3 pin2-st kõrgemaks, kuna LDR1 on kinnitatud positiivse joonega. See põhjustab selle väljundi kõrge.
Samamoodi hoitakse A2 pin6 madalamal kui pin5 tänu LDR2 ühendusele maandusjoonega ja see võimaldab A2 väljundil püsida kõrgel.
Teisisõnu, kui LDR-id on ühtlaselt valgustatud, hoitakse mõlema op-võimendi mitte-inverteerivaid (+) sisendeid kõrgemal kui nende inverteerivaid (-) sisendeid, mis põhjustab nende väljundite kõrguse.
Kui mõlemad väljundid on kõrged, hoiavad transistori juhid vastavaid mootoreid ühtlaselt töötamas, mis võimaldab vastavalt sõidukil sujuvalt sirgjoonel liikuda.
Kuidas sõiduk järgib joont
Kui tekib kumer valge joon, kaldub üks LDR-idest sirgjoonest välja, põhjustades valguse erinevust vooluahela punktis A. See põhjustab järgneva vastava võimendi väljundi languse ja vastava mootori hetkelise seiskumise.
Selles olukorras sunnib teine veel töötav külgmootor sõidukit pöörama joone painutusnurga suunas, mis toob varjutatud LDR-i tagasi valge joone valgustatud piirkonda. Kui see juhtub, hakkavad mõlemad mootorid taas tööle, võimaldades sõidukil normaalselt töötada.
Ülaltoodud automaatne sisse / välja lülitamine vasakul / paremal mootoril vastusena valguse kõikumistele painduvatest valgetest joontest sunnib sõidukit jätkuvalt reguleerima ja manööverdama vastavalt valgele joonele.
Kuidas sõidukit ehitada
Ühes minu varasemas postituses õppisime, kuidas a lihtne kaugjuhitav sõiduk saab ehitada, kasutades vaid paari ristkülikukujulise tahvli tagumise serva külge kinnitatud mootorit ja plaadi esiservas paari näivratast.

Kavandatud liinijärgse sõiduki vooluringi jaoks kasutame sõidukile sarnast konstruktsiooni, nagu on näidatud ülaltoodud joonisel.
Korraldus näeb välja üsna lihtne, tagarattad on kinnitatud mootoritega, mida juhivad transistori draiverid üle opvõimendi väljundite.
Kui sõiduk kaldub joonest kõrvale, lülitab LDR-de valgustuse erinevus ühe op-amprist välja, peatades vastava mootori.
See sunnib töötavat vastaskülgmootorit pöörama peatatud mootori külje poole, mis tähendab, et kui vasakpoolset mootorit pidurdatakse, on sõiduk sunnitud pöörlema vasakule, kohandudes paindjoonega, samas suunas.
See viitab ka sellele, et vasak- ja parempoolne mootori integreerimine op-võimendi väljunditega tuleks läbi viia nii, et liini ja peatatava mootori paindesuund oleks sõiduki samal küljel.
Kuidas paigutada LDR-id
Kuna väidetavalt tunnetavad kaks LDR-i (LDR1 ja LDR2) valge joone peegeldunud valgust ühtlaselt, peaks nende suund olema joone pikkusega risti, nagu allpool näidatud.

Siin oleme eeldanud, et sõiduk sõidab paremalt vasakule, järgides samal teel asetatud joont.
LDR-de kogulaius peaks jääma joone laiusesse.
LDR-id ja valgusdioodid tuleks paigaldada sõiduki alumisele pinnale ja eelistatavalt tagaküljele, otse tagarataste alla.
Näidatud LED on valge LED, millel on seeria 1K takisti. See peab olema paigutatud LDR-ide lähedale ja keskele, tagades, et LDR-i valgus ei jõuaks otse LDR-i, selle asemel peaks valgus jõudma LDR-ideni, peegeldudes nende all olevast valgest joonest.
Mootori spetsifikatsioonid
Mootorid võivad olla mis tahes tüüpi püsimagnetiga harjatud tüübid, kuid need peaksid olema varustatud käigukastiga, et tagada sõiduki sobiv aeglane ja ühtlane liikumine.
Mootori võimsus peaks vastama koormale, mida sõiduk peaks kandma. Seda saab proovida mõne praktilise katsetamise abil.
Kuidas seadistada
Selle liinijärgse sõiduki vooluringi seadistamiseks peate korraldama lamedale pinnale maalitud väikese valge joone riba või lamedale pinnale kleepunud valge lindi.
Asetage süsteem (ilma ratasteta) üle joone, nagu on näidatud eelmises skeemis, nii et LDR-id ja LED on joone laiuses õigesti reguleeritud.
Lülitage toide sisse, valge LED peaks selle all olevat ala eredalt valgustama. Reguleerige kahte eelseadistust, kuni mõlemad mootorid lülitatakse korraga sisse.
Nüüd nihutage seadet veidi paremale, nii et LDR1 liigub valgest joonest välja.
Vasak mootor peaks seiskuma. Kui see ei muutu, reguleerige P1 enne, kui vasak mootor lihtsalt seiskub.
Seejärel liigutage seadet veidi vasakul, nii et LDR2 liigub valgest joonest välja. See peaks seisma parempoolse mootori. Kui see ei muutu, reguleerige 10k eelseadistust, kuni parempoolne mootor lihtsalt seiskub.
See viib seadistusprotseduurid lõpule ja nüüd saate mootoritele rattad paigaldada ja kasutada seda juhitavat sõidukit, et automaatselt järgida maapinnal maha pandud rada.
Valge joon vs must joon
Kavandatud liinijärgse sõiduki süsteem põhineb musta joone asemel maapinnale kinnitatud valgel joonel. Musta joone asemel valge joone eelis on järgmine:
Valge joon tundub musta joonega võrreldes elegantsem ja korralikum.
Valge joone põhine joonejälgija võib töötada ka pimedas või hämaras ümbritsevas valguses. Mustvalgusel põhinevad kujundused nõuavad sõiduki töökorras hoidmiseks tavaliselt välist valgustust.
Valge joone põhine AGV töötab täpsemini, olenemata plaatide värvist, välja arvatud äärmiselt valged või valge joone värviga samaväärsed plaadid.
Sõiduki muutmine musta joone järgijaks
Hoolimata ülaltoodud eelistest, kui kasutaja soovib, et sõiduk järgiks musta joont, saaks süsteemi kavandatava disaini mõne kiire modifikatsiooni abil seda hõlpsasti teisendada.
Kasutaja lihtsalt selleks, et vahetada või vahetada op-amprite sisendnupu ühendusi eelseadistustega ja eemaldada LDR-idega seotud LED.
Paar: 50-vatine siinuslaine UPS-ahel Järgmine: Põhilised elektroonilised vooluringid - elektroonika juhend algajatele