Selles postituses uurime, mis on BLDC mootor, ja seejärel õpime andurita BLDC mootori draiveri vooluahela kujundust.
BLDC protsessori ventilaatorid
Kas olete näinud neid kiirelt liikuvaid protsessoreid, pinge stabilisaatoreid, DVD-mängijaid ja muid sarnaseid seadmeid, mis töötavad ülimalt tõhusalt, tarbivad minimaalselt ruumi, voolu ja suudavad siiski teostada olulisi toiminguid vastavalt konkreetsele seadmele?
Jah, need on kõik BLDC ventilaatorite või harjadeta alalisvoolumootorite kaasaegsed versioonid, mis on palju paremad kui vanad traditsioonilised harjatud mootorid.

Pildi viisakus: https://en.wikipedia.org/wiki/Computer_fan#/media/File:Geh%C3%A4usel%C3%BCfter.jpg
Kuid BLDC-mootor vajab keerukat draiveri vooluringi ja jah, kõik need protsessori ventilaatorid sisaldavad neid draiverimooduleid sisseehitatud, kuigi need tunduvad tavalise alalisvoolu abil hõlpsasti kasutatavad, sisemiselt on süsteem juba varustatud nutika vooluahelaga.
BLDC mootori juht
Siit saame teada ühe sellise nutika BLDC-mootori draiveri kohta, kasutades ühe kiibi DRV10963 kõigi BLDC-mootorite uskumatu efektiivsusega juhtimiseks ja hiljem näeme ühes eelseisvatest artiklitest, kuidas seda IC-vooluahela saab isegi sõidu jaoks uuendada võimsad suure vooluga BLDC-d nagu need, mis on kasutatakse kvadrokopterites.
Kuid enne seda oleks huvitav natuke teada saada BLDC mootoritest.
Erinevus harjatud ja harjadeta alalisvoolumootorite vahel
Harjatud mootori ja harjadeta mootori erinevus tõhususe määrast on üsna ilmne.
Kuna harjatud mootorite haavaarmatuur ise liigub magnetite vahel, peavad nad kasutama nn harju (hõõrumiskontakte), nii et liikuvad pooli klemmid suudaksid toitepinget pidevalt vastu võtta, ilma et peaksid ise toiteallikani jõudma, mis muidu muudaks töötamine võimatu ja ohustavad toiminguid.
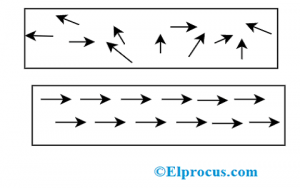
Harjadeta mootoris ei liigu mähis ega mähis kunagi ja on pidev, siin kannab rootor püsimagnetite komplekti ja pöörleb ümbritsevate mähiste magnetvoogude mõjul.
Kuna magnet on vaba kõigist vaevadest ja on võimeline töötama ilma terminalide kaasamiseta, et elektrit hallata või energiat vastu võtta, võib see minna vaevata, pööreldes kiiresti ja praktiliselt müratasemega.
Kuid siin on konks. Selleks, et panna elektromagnet reageerima püsimagneti voogudele, peab magnetfaas või poolused olema pidevas nihkes, nii et kaks analoogi suudaksid pidevalt reageerida ja läbida vastandjõu, vabastades nõutava väändejõu üle rootori ja teostage pöörlemine saadud pöördemomendiga.
Harjatud mootoris muutub see lihtsamaks tänu armatuuri mähise isereguleeruvale olemusele, mis on võimeline pöörlema ja looma isemajandava vastupidise magnetjõu ning jätkama pöörlemist ilma väliste impulsside ja töötlemiseta.
Kuid BLDC-s muutub see probleemiks, kuna magnetrootor jääb 'abituks' ja nõuab mähiselt arvutatud magnetkäsku, et pöörata tähendusrikkalt ja mitte juhuslikult.
Täpselt seetõttu vajavad kõik BLDC mootorid mootori sees oleva kolme erineva mähiste komplekti juhtimiseks kohustuslikult mootori juhi vooluahelat.
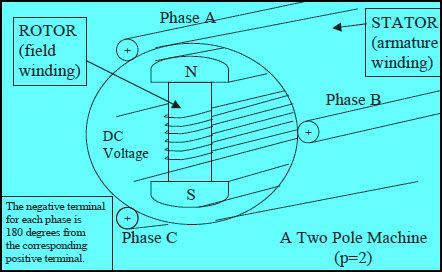
Seega on kõik BLDC põhimõtteliselt kolmefaasilised mootorid ja vajavad rootoril pöördemomendi saamiseks kohustuslikult 3 faasi.
Mida teevad sensorita BLDC draiverid
Anduriga vähem BLDC draiveri vooluahelat elektrifitseeritakse järjestikku 3 mähise komplekti järjestikku nii, et magnetrootor suudab läbida järjepideva vastasjõu, mis võimaldab mootoril saavutada püsivat pöördemomenti ja pöörlemisjõudu.
Kuid seda BLDC mähise järjestikust toite vooluahela poolt ei saa lihtsalt juhuslikult seada, see peab olema tandem või vastusena rootormagneti pöörlemisasendile, vastasel juhul võib rakendus minna segamini ja võime olla mootori võlli (rootori) tunnistajaks ) pöörleb juhuslikult, st tõmbleb päripäeva ja vastupäeva mõistliku pöörlemiseta.
Miks andureid kasutatakse BLDC mootorites
Seetõttu tutvustame andureid, mis on paigutatud paljude BLDC mootorite variantide sisse, need andurid (tavaliselt Halli efekti andurid) 'mõistavad' rootormagneti magnetpooluste muutuvat asendit, juhendavad lisatud protsessori vooluahelat vastava mähise elektrifitseerimiseks ja pöörlemisliikumise teostamiseks optimaalse pöördemomendiga.
Halli efektiandureid kasutatakse tõhusalt enamikes suhteliselt suurema suurusega BLDC mootorites, kuid väiksemate mootorite puhul, näiteks protsessori ventilaatorites, protsessoriseadmetes, DVD-mängijates, väikestes väljalaskeventilaatorites, kvadrokopterites kasutatavate mootorite puhul võivad halli efektiandurid muutuda sobimatuks ja seetõttu rakendatakse alternatiivset andurivaba lähenemist.
See hõlmab mähise omase tagumise elektromagnetvälja elektrienergia kasutamist, mida võetakse võrdlusallikana asjakohaste mähiste komplektide töötlemiseks ja elektrifitseerimiseks ning pöördemomendi täitmiseks.

BLDC rootori liikumise simuleerimine
Eespool toodud toorsimulatsioonis saame visualiseerida, kuidas vabanenud tagumist EMF-i võetakse võrdlusalusena ja kasutatakse järgnevate mähiste komplektide sekveneerimisimpulsside tootmiseks, pannes tsentraalse püsimagnetrootori pöörlemismomendi. Simulatsioon ei pruugi olla täpne replikatsioon, sellegipoolest annab see ligikaudse ülevaate tööpõhimõttest.
Huvitav on märkida, et impulss lülitatakse siis, kui magneti N / S on täpselt mähise südamiku keskel, mis võimaldab mähisel energiat kas N või S sõltuvalt impulsi polaarsusest ning tekitada ligitõmbavat ja tõrjuvat jõud N / S magnetitele, tekitades seeläbi vajaliku pöördemomendi maksimaalsel võimalikul tasemel.
Ja see omakorda saab võimalikuks tänu eelmise mähise ümberlülitamisel vabanenud tagumisele EMF-ile.
Ülaltoodud arutelu selgitab anduriga vähem BLDC-mootori tööd. Nüüd õpime, kuidas määratud vooluahela ülaltoodud keerukas kolmefaasiline lülitus
BLDC draiver DRV10963
Pärast mõningast guugeldamist leidsin selle sensoriteta BLDC draiveri vooluringi, kasutades ühte kiipi DRV10963, mis kasutab konfiguratsioonis väheolulisi osi ja suudab siiski kavandatud toimingute jaoks keerukat töötlemist rakendada.
DRV10963 on tipptasemel kiip, mis on spetsiaalselt ette nähtud andurite vähem BLDC mootorite käitamiseks, eeldades lihtsalt mootori mähise tagumist EMF-i ja edastades täpse käigu mähisele ning saavutades optimaalse pöördemomendi rootori kohal.
Vooluringi skeem

Ülaltoodud pilt näitab vooluahela lihtsat paigutust, mis ilmselt ei sisalda muud kui IC ise.
Erinevad kinnitusdetailid on määratud kindlaksmääratud funktsioonide täitmiseks, näiteks mootori PWM-kiiruse reguleerimine, suuna juhtimine jne, lihtsalt söödates asjakohaseid kinnitusdetaile väljastpoolt pärinevate andmetega.
Järgmisel pildil on kiibi pakett, mis näeb välja nagu 10-kontaktiline DIL IC, mille erinevaid pistikfunktsioone saab uurida diagrammil esitatud andmete põhjal:

Viidates pakutava andurita BLDC draiveri vooluringi skeemile nagu eelmises artiklis ja ka ülaltoodud kiibipildil on esitatud, võib kinnitusdetailide üksikasju mõista järgmiselt:
IC Pinouti üksikasjad
FG = See on mootori kiiruse indikaatori tihvt (väljund), mis on varustatud avatud kollektori režiimis koos sisemise BJT-ga.
Avatud kollektor tähendab, et selle tihvti väljund tekitab negatiivsed PWM-id läbi avatud kollektori ja maapinna vajuvate loogikate kaudu, nii et kehtiva näidu saamiseks peab kasutaja ühendama selle avatud kollektori ja positiivse toiteallika (5V) ) kiiruse näitamise saavutamiseks sellel tihvtil.
FGS = See on kiiruse indikaatori valija sisend, mis tähendab, et siin võib sisestada indikaatori tihvti FG sisse / välja lülitamiseks loogika kõrge või madal.
Vcc = positiivne toiteallika toide selle töö võimaldamiseks ei tohi ületada 5 V.
W, U ja V on kolmefaasilised väljundid BLDC mootorile, mis peaks töötama selle IC kaudu. See toimib ka nagu sisendid mootori poolte vajaliku sünkroniseeritud ümberlülitamise mootori EMF-impulsside tuvastamiseks.
GND = viitab IC negatiivsele toitevõrgule Vdd tihvti suhtes.
FR = Aitab valida või käskida mootori suunda ja seda saab dünaamiliselt muuta igal ajal, kui süsteem on sisse lülitatud, lihtsalt välise loogika kõrge või madal loogika sisseviimisega.
PWM = See tähistab PWM-i juhtsisendit väline PWM lainekuju generaator.
See PWM-sisend võib olla ühendatud BLDC-mootori soovitud kiiruse juhtimiseks.
Katkendlik ruum kiibi keskel tähistab termopatja, mille võib jahuti abil kinnitada või suruda, et uputada kiibi võimalik soojusenergia tekkimine samal ajal kui seda kasutatakse koormatud BLDC mootoriga.
Ülaltoodud arutelus on toodud andurita BLDC mootorijuhi kiibi DRV10963 kinnitus või ühenduse üksikasjad. Nüüd analüüsime kiibi sisemist konfiguratsiooni ja toimimist järgmiste punktide abil:
Seadme kirjeldus
DRV10963 on kolmefaasiline andurita elektrimootori operaator, millel on sisseehitatud toite MOSFETid (3-faasilised H-sillaga). See on kohandatud suurema tootlikkuse, vähendatud müra ja minimaalse sekundaarse materjali loendamise mootori ajami funktsioonide jaoks. Eksklusiivne sensoriteta aknapõhine 180 ° sinusoidaalne juhtimisskeem tagab müravaba mootori pendelrände efektiivsuse.
DRV10963 koosneb nutikast lukutuvastuse funktsioonist, mis on ühendatud turvalise jõudluse saavutamiseks koos sisseehitatud täiendavate turvaahelatega. DRV10963 võib leida termiliselt tõhusast 10-kontaktilisest USON-pakendist, millel on katmata termomatt.
Kuidas IC töötab
DRV10963 toode on 3-faasiline andurita mootorioperaator, millel on sisendvõimsusega MOSFETid
loodud spetsiaalselt suurepärase jõudluse, vähendatud resonantsi ja minimaalsete pindmiste osade loendamise mootori ajami funktsioonide jaoks.
Peamine sensorita akendeta 180 ° sinusoidaalne juhtimiskava esitab mootori müra funktsioneerimist, säilitades elektriliselt stimuleeritud pöördemomendi pulsatsiooni nominaalse. Initsialiseerimise järel pöörab DRV10963 seade mootorit FR sisendtapi kaudu määratud kursil.
DRV10963 kiip hakkab töötama kolmefaasilise BLDC mootoriga, kasutades sinusoidaalset juhtimiskava.
Kasutatavate sinusoidaalsete faasipingete olulisus sõltub PWM-tihvti töötsüklist. Mootori liikumise ajal edastab DRV10963 IC kiirusandmed FG tihvti juures.
DRV10963 seade koosneb nutikast lukutundlikkuse võimest. Sellisel juhul, kui mootor seisab võõra surve all, tuvastab programm lukustusprobleemi ja võtab meetmeid koos mootoriga iseenesest.
Lukustustundliku ahela konkreetset protseduuri on üksikasjalikult kirjeldatud jaotises Luku tuvastamine. Lisaks sisaldab DRV10963 IC mitut sisseehitatud ohutusahelat, näiteks voolukaitse, ülepingekaitse, pingekaitse ja üle temperatuurikaitse.
Iseloomulik selgitus
Kiiruse sisestamine ja juhtimine
DRV10963 esitleb 3-faasilisi 25-kl-lz PWM-väljundeid, millel võib olla faasist faasi sinusoidaalsete lainekujude standardprotsent. Kui mõni tsükkel määratakse maapinna suhtes, on tuvastatud lainekuju tõenäoliselt PWM-iga kaitstud sinusoid koos 3. järgu harmoonikutega, nagu on näidatud joonisel 2.

See kodeerimisstrateegia muudab draiveri spetsifikatsioonid sujuvamaks põhjusel, et tõenäoliselt on sageli üks faasiväljund, mis võiks olla nulliga võrdne.
Tulemuse amplituud varieerub vastavalt toitepingele (VCC) ja volitatud PWM-i töötsüklile (PWM), nagu on määratletud võrrandis 1 ja rõhutatud joonisel 3. Optimaalne amplituud rakendatakse, kui juhendatud PWM-i töötsükkel on 100 PERCENT.
Vphpk = PWMdc>

Mootori pöörlemiskiirust ei reguleerita otse PWM-i abil, et reguleerida mootori jaoks kasutatavate faasipingete amplituudi.
PWM-sisendi töötsükkel muudetakse 9-bitiseks digitaalseks suuruseks (0 kuni 511).
Määruse resolutsioon on 1/512 == 0,2%. Töötsükli analüsaator hõlbustab esialgset tellimuste vahetamise toimingut sisestatud töötsükli ja 9-bitise digitaalse näitaja vahel.
Seda on rõhutatud joonisel 4, kus r = 80 ms.

Vahetustulemus PWM-i tellitud töötsükli ja väljundi maksimaalse amplituudi vahel on seadmes DRV10963 erinev.
Tulemuse maksimaalset amplituudi arutatakse võrrandiga 1, kui käsk PWM> minimaalne toimiv töötsükkel. Madalaim töötsükkel on sageli määratud OTP seadistusega 13%, 10%, 5% või piiranguteta (MINOP_DC1: 0).
Tabelis 1 on esitatud minimaalse töötsükli jaoks soovitatavad konfiguratsioonid.
Kui PWMi juhendatud töötsükkel on väiksem kui madalaim toimiv töötsükkel ja üle 1,5%, reguleeritakse väljundit minimaalse töötsükliga. Kui sisendi töötsükkel on alla 1,5%, ei tööta seade DRV10963 tõenäoliselt väljundit ja see saadetakse ooterežiimi.
Seda saab illustreerida joonisel 6.

Pöördkonfiguratsioonid
DRV10963 käivitab mootori tehnika abil, mida on üksikasjalikult kirjeldatud joonisel 7.

Mootori initsialiseerimise graafik koosneb seadmete konfigureeritavatest alternatiividest avatud ahela jaoks, et sulgeda silmuse vahetamise piir (HOW.), Joondada aeg (TAHQH) ja kiirendada kiirust (RACE).
Rootori joondamiseks kommutatsiooniloogikale teostab DRV10963 x% töötsükli faasides V ja W, samal ajal kontrollides faasi U GND juures.
See stsenaarium püsib TAIign sekundite jooksul. X% olulisuse tuvastab VCC pinge (nagu on näidatud tabelis 2), et hoida ülalpöörlemismomenti üle erinevate toitepingete.
Kui joondusjärjestus on saavutatud, on mootor sunnitud kiirenema, pannes tipp-tasemega sinusoidsed faasipinged, nagu on näidatud tabelis 2, ja suurendades kommutatsioonivahemiku abil RACE-ga esindatava laieneva kiirusega, kuni kommutatsiooni tase kasvab Hom-ni ., Hz.
Niipea kui see piir on saavutatud, teisendab DRV’l0963 suletud ahela režiimi, kusjuures sisseehitatud juhtimisalgoritm tuvastab kommuteerimisajami progresseerumise, samas kui kasutatava pinge tuvastab PWM-i volitatud töötsükli sisend.
Avatud ahela sulgemise ahela ülemineku piir (Hom), joondamise aeg (TAHQH) ja kiirenduse kiirus (RACE) on konfigureeritavad OTP konfiguratsioonide kaudu.
Üleandmise künnise (KUID) valik kinnitatakse tavaliselt katse- ja veahindamise teel. Eesmärk oleks eelistada üleandmistolerantsi, mis võiks olla võimalikult väike ja võimaldaks mootoril vaikselt ja tõetruult vahetada avatud silmuse kiiruse ja suletud ahela kiirenduse vahel.
Tavaliselt suurenenud kiirusega mootorid (maksimaalne kiirus) vajavad kõrgemat üleandmistaluvust, kuna kõrgendatud kiirusega mootorid sisaldavad vähenenud Kt, seega taskukohasemat BEMF-i.
Tabelis 3 on esitatud konfigureeritavad üleandmistolerantsi eelistused. Suurim kiirus elektrilises Hz-s on osutunud võrdluseks, mis aitab valida konkreetse esitamise jaoks soovitud üleandmiskiiruse.

Joondamisaja (TAHQH) ja kiirenduse määra (RACE) valik võib sõltuda isegi katse- ja veaeksamitest.
Suurema inertsiga mootorid nõuavad tavaliselt pikemat joondusaega ja aeglasemat kiirust, vastupidiselt madala inertsiga mootoritele, mis tavaliselt nõuavad lühemat joondusaega koos kiirema kiirendusprotsendiga. Stardistabiilsuse ärakasutamiseks tuleb rakendada programmi kompromisse, mitte ülespööramise perioodi.
TI toetab alates vähem intensiivsete konfiguratsioonide (aeglasem RACE ja märkimisväärne Tmign) otsustamisest, et kompromiteerida pöördemomendi pikenemise aega maksimaalse täitmismäära toetamiseks.
Niipea kui seade on kohusetundlikult kohandatud, võib ekstra jõulisi konfiguratsioone (suurem RACC ja väiksem TAHQH) kasutada sisselülitusmomendi vähendamiseks ja samal ajal ettevaatlikult täitmise määra jälgimiseks.
Tabelis 4 on esitatud TA'g ,, ja RACE seadistatavad seadistused.

Selle andurita BLDC IC-ga seotud selgituse ülejäänud osa on esitatud selles algses andmelehes
Kommenteerige lisateavet ülalkirjeldatud sensorita BLDC mootori draiveri vooluahela üksikasjade kohta
Paar: 12V LED seljakoti toiteallikas Järgmine: Quadcopteri kaugjuhtimisahel ilma MCU-ta