Järgmises artiklis käsitleme peamisi operatiivvõimendi parameetreid ja nendega seotud operatiivvõimendi põhirakenduste ahelaid koos võrranditega, et lahendada nende konkreetsete komponentide väärtused.
Op-võimendid (operatsioonivõimendid) on spetsiaalset tüüpi integraallülitused, mis sisaldavad otseühendatud suure võimendusega võimendit, mille üldised reageerimisomadused on reguleeritud tagasiside abil.
Op-amp tuleneb oma nime asjaolust, et see suudab teostada mitmesuguseid matemaatilisi arvutusi. Tänu oma reaktsioonile tuntakse op-võimendit ka lineaarse integraallülitusena ja see on paljude analoogsüsteemide põhikomponent.
Operatsioonivõimendil on erakordselt kõrge võimendus (võib-olla läheneb lõpmatusele), mida saab reguleerida tagasiside abil. Kondensaatorite või induktiivpoolide lisamine tagasisidevõrku võib põhjustada võimenduse, mis muutub sagedusega, mõjutades integraallülituse üldist tööolekut.
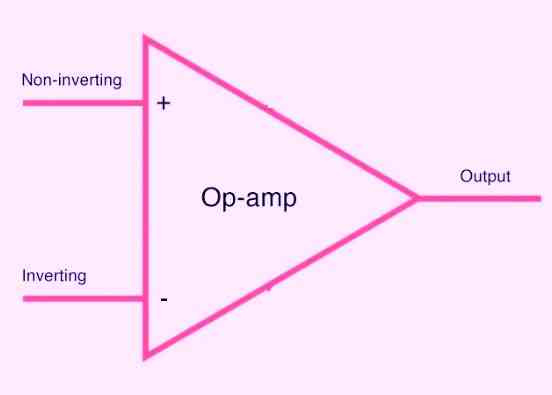
Nagu ülaltoodud joonisel näidatud, on põhiline operatsioonivõimendi kolme terminaliga seade, millel on kaks sisendit ja üks väljund. Sisendklemmid liigitatakse 'inverteerivateks' või 'mitteinverteerivateks'.
Operatsioonivõimendi parameetrid
Võrdsete sisendpingetega varustamisel on ideaalse operatiivvõimendi ehk 'operatsioonivõimendi' väljund null või '0 volti'.
VIN 1 = VIN 2 annab VOUT = 0
Praktilistel op-võimenditel on ebatäiuslikult tasakaalustatud sisend, mis põhjustab ebaühtlaste eelpingevoolude voolamist läbi sisendklemmide. Operatsioonivõimendi väljundi tasakaalustamiseks peab kahe sisendklemmi vahel olema sisendi nihkepinge.
1) Input Bias Current
Kui väljund on tasakaalustatud või kui V VÄLJAS = 0, sisendi nihkevool (I B ) on võrdne poolega kahte sisendühendust sisenevate üksikute voolude koguarvust. Sageli on see väga väike arv; näiteks mina B = 100 nA on normaalväärtus.
2) Sisendnihke vool
Sisendklemmidele jõudva iga üksiku voolu erinevust nimetatakse sisendnihkevooluks (I see ). Jällegi on see sageli äärmiselt madala väärtusega; näiteks on tavaline väärtus I see = 10 nA.
3) Sisendnihke pinge
Operatsioonivõimendi tasakaalus hoidmiseks tuleb sisendi nihkepinge V see tuleb rakendada üle sisendterminali. Tavaliselt on V väärtus see on = 1 mV.
I väärtused see ja V see võivad mõlemad olenevalt temperatuurist erineda ja seda erinevust nimetatakse I see triiv ja V see triivib vastavalt.
4) Toiteallika tagasilükkamise suhe (PSRR)
Sisendnihkepinge muutuse ja vastava toitepinge muutuse suhet nimetatakse toiteallika tagasilükkamise suhteks või PSRR-iks. See on sageli vahemikus 10 kuni 20 uV/V.
Operatsioonivõimendite täiendavad parameetrid, mida võiks mainida, on järgmised:
5) Avatud ahela võimendus/suletud ahela võimendus
Avatud ahelaga võimendus viitab op-võimendi võimendusele ilma tagasisideahelata, samas kui suletud ahela võimendus viitab op-võimendi võimendusele tagasisideahelaga. Tavaliselt on seda esindatud kui A d .
6) Tavarežiimi tagasilükkamise suhe (CMRR)
See on diferentsiaalsignaali ja tavarežiimi signaali suhe ja see on diferentsiaalvõimendi jõudluse mõõt. Selle suhte väljendamiseks kasutame detsibelle (dB).
7) Pöördekiirus
Pöördekiirus on kiirus, millega võimendi väljundpinge muutub suurte signaalitingimuste korral. Seda esitatakse ühikuga V/us.
Op Amp põhirakenduste vooluringid
Järgmistes lõikudes õpime tundma mitmeid huvitavaid opvõimendi põhiskeeme. Iga põhikujundust selgitatakse valemitega, et lahendada nende komponentide väärtused ja omadused.
VÕIMENDI VÕI PUHVER
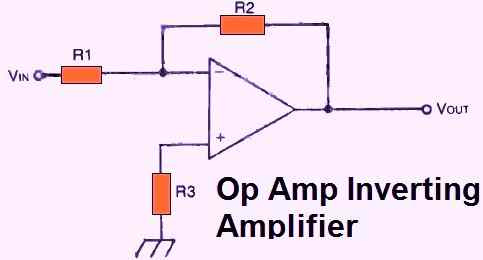
Inverteeriva võimendi või inverteri vooluringi on näha ülaltoodud joonisel 1. Ahela võimenduse annab:
Väljas = - R2/R1
Pange tähele, et võimendus on negatiivne, mis näitab, et ahel töötab faasiinverteeriva pinge järgijana, kui kaks takistust on võrdsed (st R1 = R2). Väljund oleks identne sisendiga, vastupidise polaarsusega.
Tegelikkuses võib takistid ühtse võimenduse saamiseks eemaldada ja asendada otseste hüppaja juhtmetega, nagu on näidatud alloleval joonisel 2.
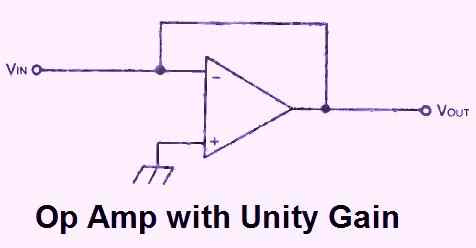
See on võimalik, kuna R1 = R2 = 0 selles vooluringis. Tavaliselt eemaldatakse R3 inverteeriva pinge järgija ahelast.
Operatsioonivõimendi väljund võimendab sisendsignaali, kui R1 on väiksem kui R2. Näiteks kui R1 on 2,2 K ja R1 on 22 K, võib võimenduse väljendada järgmiselt:
Väljas = – 22 000/2200 = –10
Negatiivne sümbol tähistab faasi inversiooni. Sisend- ja väljundpolaarsused on vastupidised.
Tehes R1 suuremaks kui R2, võib sama vooluahel ka sisendsignaali nõrgendada (vähendada selle tugevust). Näiteks kui R1 on 120 K ja R2 on 47 K, oleks ahela võimendus ligikaudu järgmine:
Väljas = 47 000/120 000 = - 0,4
Jällegi on väljundi polaarsus sisendi omaga pöördvõrdeline. Kuigi R3 väärtus pole eriti oluline, peaks see olema ligikaudu võrdne R1 ja R2 paralleelse kombinatsiooniga. Mis on:
R3 = (R1 x R2)/(R1 + R2)
Selle demonstreerimiseks vaadake meie eelmist näidet, kus R1 = 2,2 K ja R2 = 22 K. R3 väärtus peaks selles olukorras olema ligikaudu:
R3 = (2200 x 22000)/(2200 + 22000) = 48 400 000/24 200 = 2000 Ω
R3 jaoks saame valida lähima standardtakistuse väärtuse, kuna täpne väärtus pole vajalik. Sel juhul võiks kasutada 1,8 K või 2,2 K takistit.
Joonisel 2 kujutatud vooluringi tekitatud faasiinversioon ei pruugi olla mitmes olukorras vastuvõetav. Operatsioonivõimendi kasutamiseks mitteinverteeriva võimendina (või lihtsa puhvrina), ühendage see nii, nagu on näidatud alloleval joonisel 3.
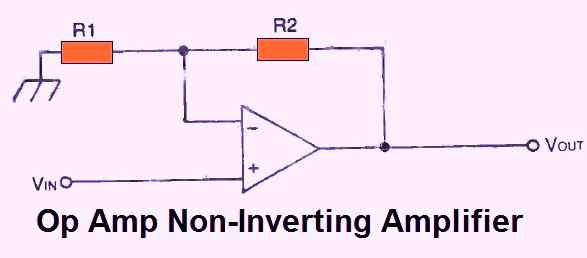
Selle ahela võimendust väljendatakse järgmiselt:
Väljas = 1 + R2/R1
Väljund ja sisend on sama polaarsusega ja faasis.
Pidage meeles, et võimendus peab alati olema vähemalt 1 (ühtsus). Mitteinverteeriva vooluringi abil ei ole võimalik signaale summutada (vähendada).
Ahela võimendus on suhteliselt tugevam, kui R2 väärtus on oluliselt suurem kui R1. Näiteks kui R1 = 10 K ja R2 = 47 K, on operatsioonivõimendi võimendus järgmine:
Väljas = 1 + 470 000/10 000 = 1 + 47 = 48
Kui aga R1 on oluliselt suurem kui R2, on võimendus vaid mõnevõrra suurem kui ühtsus. Näiteks kui R1 = 100 K ja R2 = 22 K, oleks võimendus järgmine:
Väljas = 1 + 22 000/100 000 = 1 + 0,22 = 1,22
Kui kaks takistust on identsed (R1 = R2), on võimendus alati 2. Et selles veenduda, proovige võimendusvõrrandit mõnes stsenaariumis.
Konkreetne olukord on siis, kui mõlemad takistused on seatud väärtusele 0. Teisisõnu, nagu on näha alloleval joonisel 4, kasutatakse takistite asemel otseühendusi.
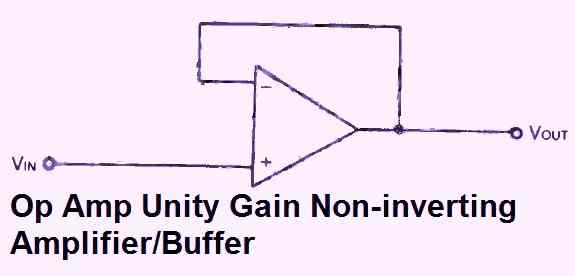
Kasum on antud juhul täpselt üks. See vastab võimenduse valemile:
Väljas = 1 + R2/R1 = 1 + 0/0 = 1
Sisend ja väljund on identsed. Selle mitteinverteeriva pinge järgija ahela rakendused hõlmavad impedantsi sobitamist, isoleerimist ja puhvrit.
ADDER (summeeriv võimendi)
Operatsioonivõimendi abil saab lisada mitmeid sisendpingeid. Nagu on näidatud alloleval joonisel 5, suunatakse sisendsignaalid V1, V2,… Vn operatiivvõimendile takistite R1, R2,… Rn kaudu.
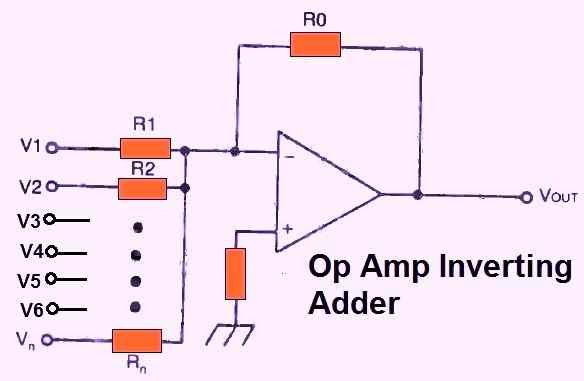
Seejärel ühendatakse need signaalid väljundsignaali saamiseks, mis võrdub sisendsignaalide summaga. Operatsioonivõimendi tegeliku jõudluse arvutamiseks liitjana võib kasutada järgmist valemit:
VOUT = - Ro ((V1/R1) + (V2/R2) . . . + (Vn/Rn))
Vaadake negatiivset sümbolit. See tähendab, et väljund on ümber pööratud (polaarsus on vastupidine). Teisisõnu, see ahel on inverteeriv summaar.
Ahelat saab muuta mitteinverteerivaks liitjaks, lülitades ühendused op-võimendi inverteerivate ja mitteinverteerivate sisenditega, nagu on näidatud alloleval joonisel 6.
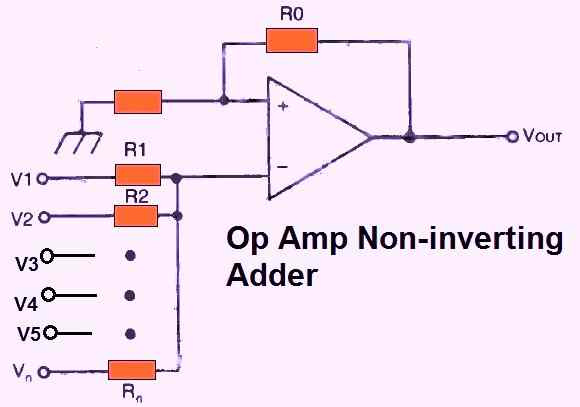
Väljundvõrrandit saab muuta lihtsamaks, eeldades, et kõigil sisendtakistitel on identsed väärtused.
VOUT = - Ro ((V1 + V2 . . . + Vn)/R)
DIFERENTSIAALVÕIMEND
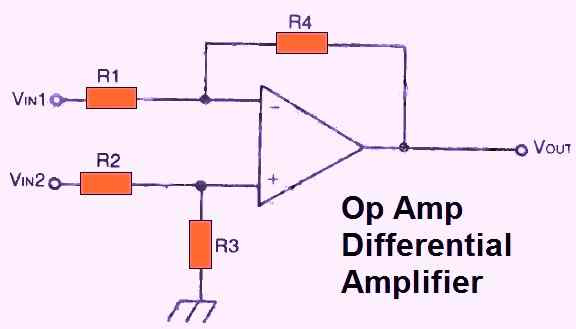
Joonisel fig 7 on kujutatud diferentsiaalvõimendi põhiahelat. Komponentide väärtused seatakse nii, et R1 = R2 ja R3 = R4. Seetõttu saab vooluahela jõudlust arvutada järgmise valemi abil:
VOUT = VIN 2 – VIN 1
Ainult seni, kuni operatsioonivõimendi suudab aktsepteerida, et sisenditel 1 ja 2 on erinev takistus (sisendi 1 takistus on R1 ja sisendil 2 on R1 pluss R3).
LIIDEJA/ALAHUTJA
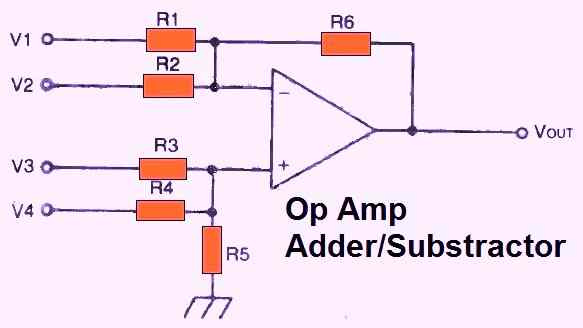
Ülaltoodud joonisel 8 on kujutatud operatsioonivõimendi liitja/lahutaja ahela konfiguratsiooni. Kui R1 ja R2 väärtused on identsed ning R3 ja R4 on samuti seatud samadele väärtustele, siis:
VOUT = (V3 + V4) - (V1 - V2)
Teisisõnu, Vout = V3 + V4 on V3 ja V4 sisendite summa, samas kui see on sisendite V1 ja V2 lahutamine. R1, R2, R3 ja R4 väärtused valitakse nii, et need vastavad operatsioonivõimendi omadustele. R5 peaks olema võrdne R3 ja R4 ning R6 peaks võrduma R1 ja R2.
KORRISTAJA
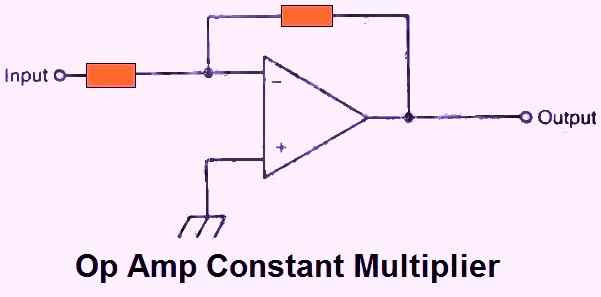
Lihtsaid korrutamisoperatsioone saab teha ülaltoodud joonisel 9 näidatud ahelaga. Pidage meeles, et see on sama vooluahel nagu joonisel 1. Püsivõimenduse (ja seejärel sisendpinge korrutamise suhtega R2/R1) ja täpsete tulemuste saavutamiseks kasutage täppistakistid ettenähtud väärtustega R1 ja R2 jaoks tuleks kasutada. Nimelt pöörab see vooluahel väljundfaasi ümber. Pinge väljundis on võrdne:
VOUT = - (VIN x väljas)
kus Av on võimendus, mis on määratud R1 ja R2 abil. VOUT ja VIN on vastavalt väljund- ja sisendpinged.
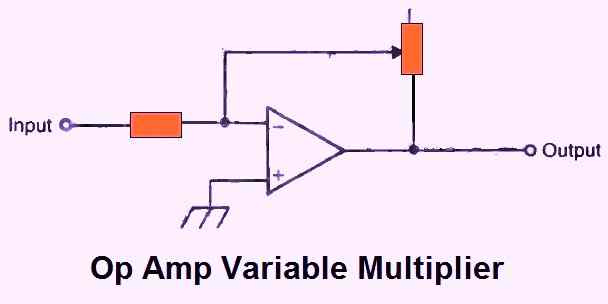
Nagu on näha ülaltoodud jooniselt 10, saab korrutuskonstanti muuta, kui R2 on muutuv takistus (potentsiomeeter). Juhtvõlli ümber saate paigaldada kalibreerimisketta, millel on märgid erinevate tavaliste võimenduste jaoks. Korrutuskonstanti saab lugeda otse sellelt kettalt, kasutades kalibreeritud näitu.
INTEGRATOR
Operatsioonivõimendi toimib vähemalt teoreetiliselt integraatorina, kui inverteeriv sisend on ühendatud väljundiga läbi kondensaatori.
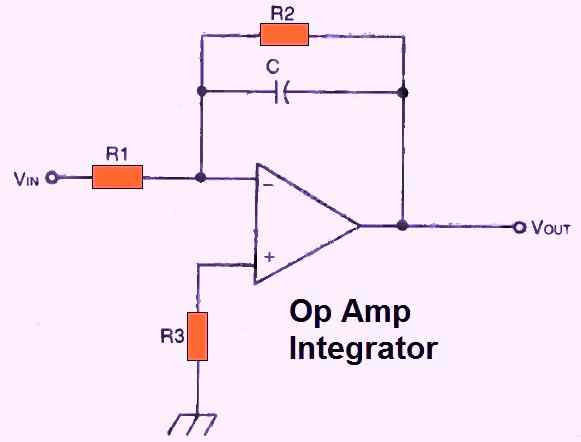
Nagu on näidatud ülaltoodud joonisel 11, tuleb alalisvoolu stabiilsuse säilitamiseks üle selle kondensaatori ühendada paralleeltakisti. See ahel rakendab sisendsignaali integreerimiseks järgmist suhet:
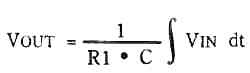
R2 väärtus tuleks valida nii, et see vastaks operatsioonivõimendi parameetritele, nii et:
VOUT = R2/R1 x VIN
DIFERENTSIAATOR
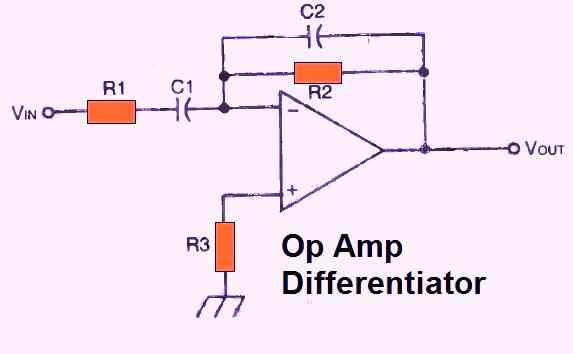
Diferentsiaatori operatsioonivõimendi ahel sisaldab sisendliini kondensaatorit, mis ühendub inverteeriva sisendiga, ja takistit, mis ühendab selle sisendi väljundiga. Sellel vooluringil on aga selged piirid, seetõttu oleks eelistatav seadistus takisti ja kondensaatori paralleelsus, nagu on näidatud ülaltoodud joonisel 12.
Järgmine võrrand määrab, kui hästi see ahel toimib:
VOUT = - (R2 x C1) dVIN/dt
LOGIvõimendid
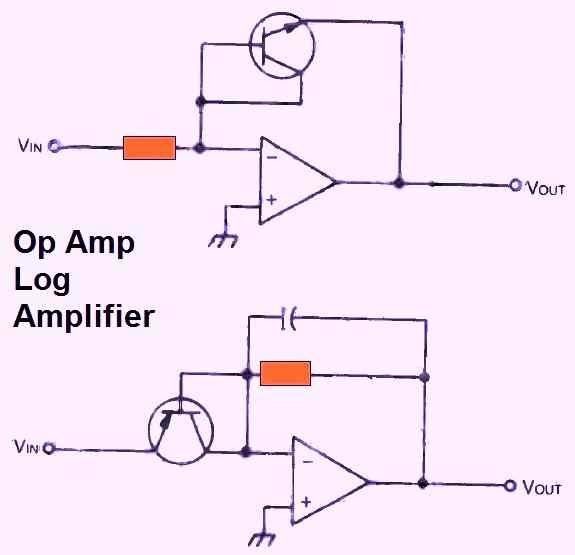
Põhiahel (joonis 13 ülal) kasutab NPN-transistori ja operatsioonivõimendit, et genereerida sisendi logiga võrdeline väljund:
VOUT = (- k log 10 ) REE/R O
'Ümberpööratud' ahel, mis töötab põhilise logimisvastase võimendina, on kujutatud alumisel diagrammil. Tavaliselt on kondensaator madala väärtusega (nt 20 pF).
AUDIO AMP
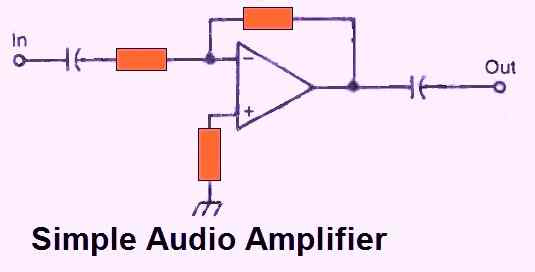
Operatsioonivõimendi on põhiolemuselt alalisvoolu võimendi, kuid seda saab kasutada ka vahelduvvoolurakenduste jaoks. Lihtne helivõimendi on näidatud ülaltoodud joonisel 14.
AUDIOMIKSER
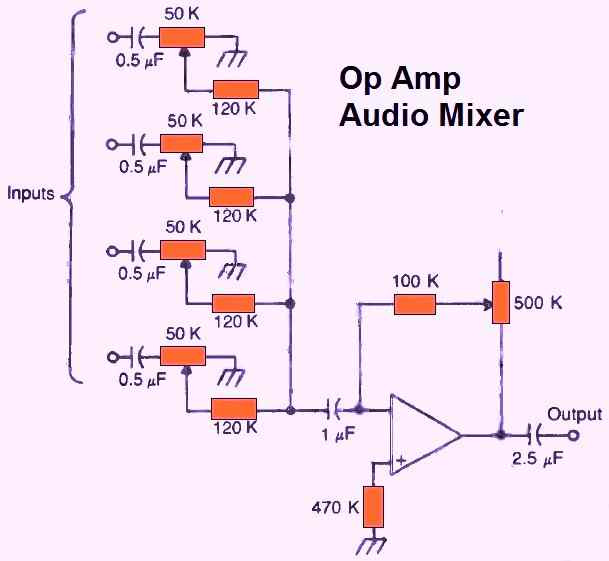
Selles vooluringis on näidatud helivõimendi modifikatsioon (joonis 15 ülal). Näete, kuidas see sarnaneb liiteahelaga joonisel 5. Erinevad sisendsignaalid on segatud või liidetud. Iga sisendsignaali sisendpotentsiomeeter võimaldab taseme reguleerimist. Seega saab kasutaja ise reguleerida erinevate sisendsignaalide suhtelisi proportsioone väljundis.
SIGNAALI JAGAJA
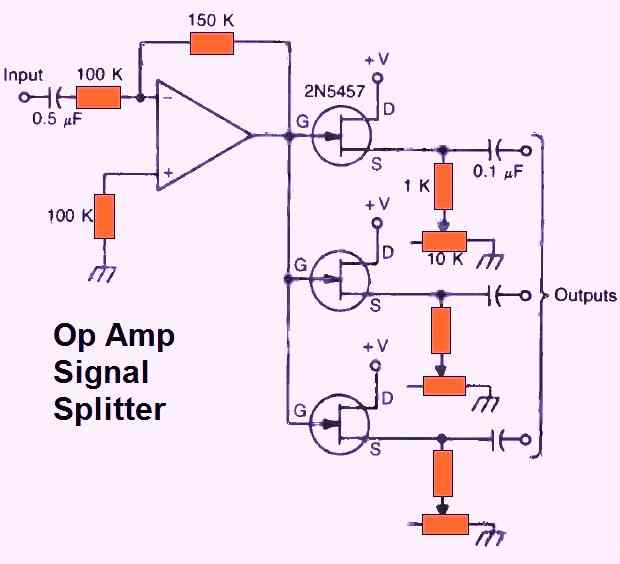
Eespool joonisel 16 kujutatud signaalijaoturi vooluring on täpselt vastand mikserile. Üks väljundsignaal on jagatud mitmeks identseks väljundiks, mis toidavad erinevaid sisendeid. Mitu signaaliliini eraldatakse üksteisest selle ahela abil. Vajaliku taseme reguleerimiseks sisaldab iga väljundliin eraldi potentsiomeetrit.
PINGE VOOLUMUUNDURIKS

Ülaltoodud joonisel 17 kujutatud vooluahel põhjustab koormuse impedantsi R2 ja R1 sama voolu.
See voolu väärtus oleks võrdeline sisendsignaali pingega ja ei sõltu koormusest.
Kuid mitteinverteeriva terminali suure sisendtakistuse tõttu on vool suhteliselt madala väärtusega. Selle voolu väärtus on otseselt võrdeline VIN/R1-ga.
VOOLU-PINGE MUUNDUR
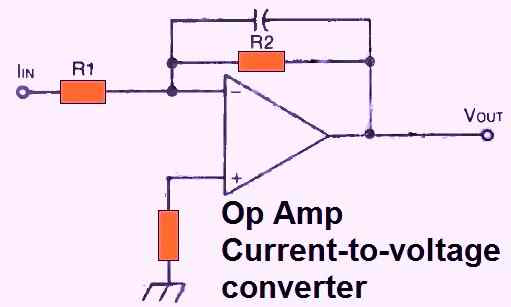
Kui väljundpinge on võrdne IIN x R2 ja kasutatakse konstruktsiooni (joonis 18 ülal), võib sisendsignaali vool voolata otse tagasisidetakisti R2 kaudu.
Teisisõnu, sisendvool muundatakse proportsionaalseks väljundpingeks.
Inverteerivas sisendis loodud nihkeahel seab vooluvoolule alampiiri, mis takistab voolu läbimist R2. 'Müra' kõrvaldamiseks võib sellele vooluringile lisada kondensaatori, nagu on näidatud joonisel.
PRAEGU ALLIKAS
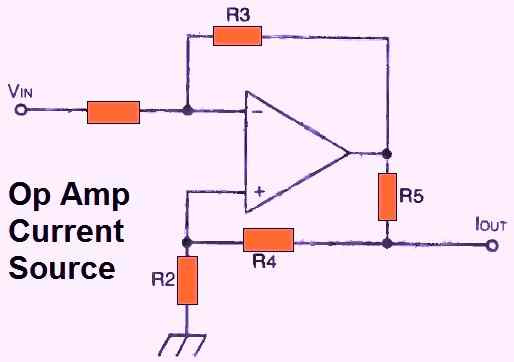
Ülaltoodud joonis 19 näitab, kuidas operatsioonivõimendit saab kasutada vooluallikana. Takisti väärtusi saab arvutada järgmiste võrrandite abil:
R1 = R2
R3 = R4 + R5
Väljundvoolu saab hinnata järgmise valemi abil:
Väljund = (R3 x VIN) / (R1 x R5)
MULTIVIBRAATOR
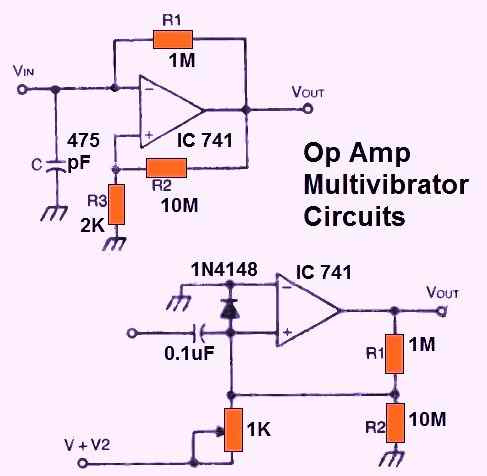
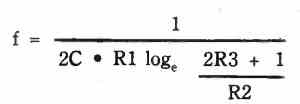
Saate kohandada operatsioonivõimendit kasutamiseks multivibraatorina. Joonisel 20 on näidatud kaks põhiahelat. Üleval vasakul olev disain on vabalt töötav (stabiilne) multivibraator, mille sagedust juhib:
Paremal alumisel diagrammil on näha monostabiilne multivibraatori vooluring, mida saab aktiveerida ruutlaine impulsssisendiga. Esitatud komponentide väärtused on CA741 operatsioonivõimendi jaoks.
RUUTLAINE GENERAATOR
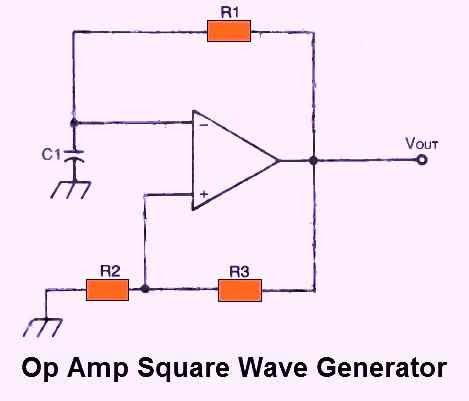
Joonisel fig 21 on kujutatud funktsionaalset ruutlaine generaatori vooluringi, mis on tsentreeritud operatsioonivõimendi ümber. See ruutlaine generaatori ahel võib olla kõige lihtsam. Lisaks operatsioonivõimendile on vaja ainult kolme välist takistit ja ühte kondensaatorit.
Kaks peamist elementi, mis määravad vooluahela ajakonstandi (väljundsageduse), on takisti R1 ja kondensaator C1. Kuid R2- ja R3-põhine positiivne tagasiside ühendus mõjutab ka väljundsagedust. Kuigi võrrandid on sageli mõnevõrra keerulised, saab neid konkreetsete R3/R2 suhete puhul lihtsamaks muuta. Illustreerimiseks:
Kui R3/R2 ≈ 1,0, siis F ≈ 0,5/(R1/C1)
või,
Kui R3/R2 ≈ 10, siis F ≈ 5/(R1/C1)
Kõige praktilisem meetod on kasutada üht neist standardsuhedest ja muuta R1 ja C1 väärtusi, et saavutada vajalik sagedus. R2 ja R3 puhul võib kasutada tavapäraseid väärtusi. Näiteks R3/R2 suhe on 10, kui R2 = 10K ja R3 = 100K, seega:
F = 5/(R1/C1)
Enamikul juhtudel oleme nõutavast sagedusest juba teadlikud ja peame valima ainult sobivad komponentide väärtused. Lihtsaim meetod on kõigepealt valida C1 väärtus, mis tundub mõistlik, ja seejärel korraldada võrrand ümber, et leida R1:
R1 = 5/(F x C1)
Vaatame tüüpilist näidet 1200 Hz sagedusest, mida otsime. Kui C1 on ühendatud 0,22 uF kondensaatoriga, peaks R1 olema järgmises valemis näidatud väärtusega:
R1 = 5/(1200 x 0,00000022) = 5/0,000264 = 18,940 Ω
Enamikus rakendustes võib kasutada tüüpilist 18K takistit. Selle ahela kasulikkuse ja kohandatavuse suurendamiseks võib R1-ga järjestikku lisada potentsiomeetri, nagu on näidatud alloleval joonisel 22. See võimaldab väljundsagedust käsitsi reguleerida.
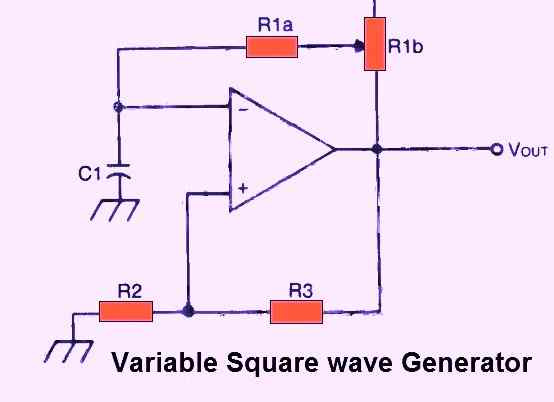
Selle vooluahela jaoks kasutatakse samu arvutusi, kuid R1 väärtust muudetakse nii, et see vastaks fikseeritud takisti R1a jada ja potentsiomeetri R1b reguleeritud väärtusele:
R1 = R1a + R1b
Fikseeritud takisti on sisestatud tagamaks, et R1 väärtus ei langeks kunagi nulli. Väljundsageduste vahemik määratakse kindlaks R1a fikseeritud väärtuse ja R1b suurima takistusega.
MUUTUV IMPULSILAIUSEGA GENERAATOR
Ruutlaine on täiesti sümmeetriline. Ruutlaine signaali töötsükkel on määratletud kõrge taseme aja ja tsükli koguaja suhtena. Ruutlainete töötsükkel on määratluse järgi 1:2.
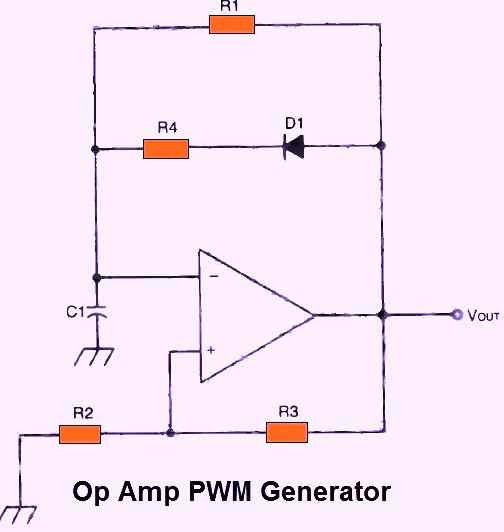
Veel kahe komponendiga saab eelmise jaotise ruutlainegeneraatori teisendada ristkülikukujuliseks lainegeneraatoriks. Joonisel fig 23 on kujutatud uuendatud vooluringi.
Diood D1 piirab voolu läbimist R4 kaudu negatiivsete pooltsüklite korral. R1 ja C1 moodustavad ajakonstandi, nagu on väljendatud järgmises võrrandis:
T1 = 5/(2C1 x R1)
Kuid positiivsetel pooltsüklitel lastakse dioodil juhtida ning R1 ja R4 paralleelne kombinatsioon koos C1-ga määrab ajakonstandi, nagu on näidatud järgmises arvutuses:
T2 = 5/(2C1 ((R1 R4)/(R1 + R4)))
Tsükli kogupikkus on vaid kahe pooltsükli ajakonstandi summa:
Tt = T1 + T2
Väljundsagedus on kogu tsükli ajakonstandi pöördväärtus:
F = 1/Tt
Siin ei võrdu töötsükkel 1:2, kuna tsükli kõrge ja madala taseme ajakonstant on erinev. Selle tulemusena tekivad asümmeetrilised lainekujud. R1 või R4 või isegi mõlemat on võimalik muuta reguleeritavaks, kuid pidage meeles, et see muudaks nii väljundsagedust kui ka töötsüklit.
SINUSLAINE OSTSILLAATOR
Siinuslaine, mis on näidatud alloleval joonisel 24, on kõigist vahelduvvoolusignaalidest kõige elementaarsem.
Selles äärmiselt puhtas signaalis pole absoluutselt mingit harmoonilist sisu. Siinuslaines on ainult üks põhisagedus. Tegelikult on täiesti puhta, moonutusteta siinuslaine loomine üsna keeruline. Õnneks saame op-võimendi ümber ehitatud ostsillaatori ahela abil optimaalse lainekuju üsna lähedale jõuda.
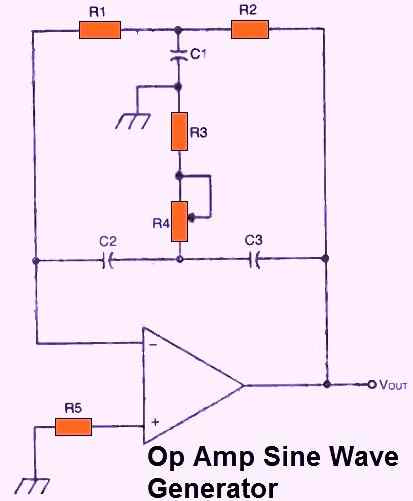
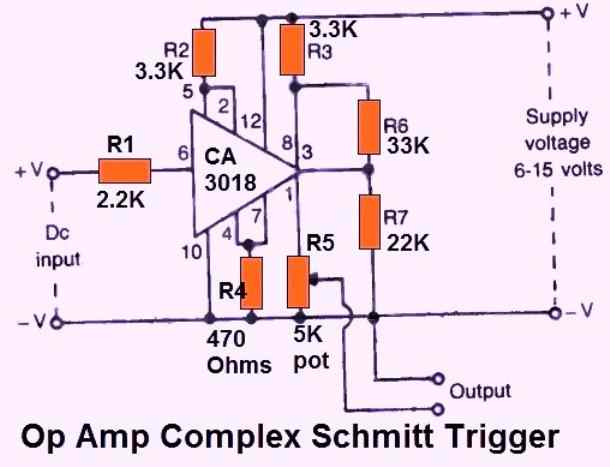
Joonisel fig 25 on kujutatud tavalist siinuslaine ostsillaatori ahelat, mis sisaldab operatsioonivõimendit. Twin-T-ahel, mis toimib riba tagasilükkamise (või sälgu) filtrina, toimib tagasisidevõrguna. Kondensaator C1 ning takistid R1 ja R2 moodustavad ühe T. C2, C3, R3 ja R4 moodustavad teise T. Skeemil on see vastupidine. Selle vooluringi nõuetekohaseks toimimiseks peavad komponentide väärtustel olema järgmised seosed:
Väljundsageduse määrab järgmine valem:
F = 1/(6,28 x R1 x C2)
R4 väärtuse muutmisega saab twin-T tagasiside võrgu häälestust mõnevõrra kohandada. Tavaliselt võib see olla pisike trimmeri potentsiomeeter. Potentsiomeeter seatakse suurimale takistusele ja seejärel vähendatakse seda järk-järgult, kuni vooluahel lihtsalt hõljub võnke piiril. Väljund siinuslaine võib rikkuda, kui takistus on reguleeritud liiga madalaks.
SCHMITT TRIGGER
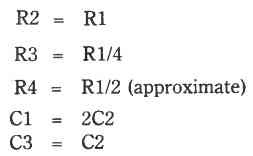
Tehniliselt võib Schmitti päästikut nimetada regeneratiivseks komparaatoriks. Selle peamine ülesanne on muuta aeglaselt muutuv sisendpinge teatud sisendpingel väljundsignaaliks.
Teisisõnu öeldes on sellel 'vastulöögi' omadus, mida nimetatakse hüstereesiks, mis toimib nagu pinge 'päästik'. Operatsioonivõimendist saab Schmitti päästikoperatsiooni põhiline ehitusplokk (vt joonis 26 ülal). Käivitus- või väljalülituspinge määravad järgmised tegurid:
IN reis = (V välja x R1) / (-R1 + R2)
Seda tüüpi vooluahelas on hüsterees kahekordne väljalülituspinge.
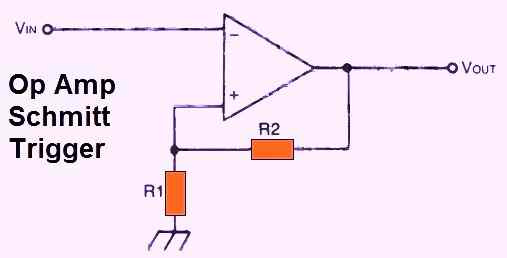
Alloleval joonisel 27 on kujutatud teist Schmitti päästikahelat. Selles vooluringis öeldakse, et väljund 'käivitub', kui alalisvoolu sisend tabab umbes viiendikku toitepingest.
Toitepinge võib olla vahemikus 6 kuni 15 volti, seetõttu saab olenevalt valitud toitepingest seadistada päästiku 1,2 kuni 3 volti. Vajadusel saab tegelikku käivituspunkti muuta ka R4 väärtuse muutmisega.
Väljund on sama, mis toitepinge niipea, kui see käivitatakse. Kui väljund on ühendatud hõõglambi või LED-iga (läbi jadaliiteseadisega takisti), süttib lamp (või LED) siis, kui sisendpinge saavutab käivitusväärtuse, mis näitab, et see täpne pingetase on sisendis saavutatud.
Pakkimine
Nii et need olid mõned opvõimendi põhiahelad koos nende parameetritega. Loodetavasti saite aru kõigist opvõimendi omadustest ja valemitest.
Kui teil on mõni muu põhiline opvõimendi vooluring, mis teie arvates tuleks ülaltoodud artiklisse lisada, mainige neid allpool oma kommentaarides.