Postitus selgitab lihtsat joone laseriga juhitavat mootori draiveri vooluringi, mis töötab reaalsele horisontaalsele laserliinile reageerimisega, mis on loodud joone laseri nivelleerimisseadmest, ja reguleerib ühendatud tööriista joondamist või töö tööd äärmiselt täiuslikult ja täpselt.
Mis on joonlaser
Liinlaserseadmed on puuseppade vanade vesiloodi joondajate ülitäpne elektrooniline asendus.
Liinlaserseade on tegelikult täiustatud laserit kiirgav seade, mis suudab genereerida 360-kraadise ° ülitäpne valgustatud horisontaalne laserjoon, mis annab kalibreeriva viite kõigile tööstuse või ehituse inseneritöödele, nii et töö lõpptulemus oleks täiesti sirge ja joondatud ilma vähimagi veata.
Ringraja soovis selle ajaveebi üks pühendunud lugeja hr Rafal.
Liinlaseriga juhitava mootori tööprotseduuri üksikasjalikke arutelusid saab õppida järgmistest lõikudest:
Kujunduse eesmärk
Härra. Rafal: Olen selles väga uus. Olen viimaste nädalate jooksul uurinud ja pole täpselt leidnud seda, mida vajan.
Olen abi eest tänulik. Lisan foto oma ideest. Tahan juhtida kahte 12 V alalisvoolumootorit laseritase abil.
Liinlasertase annab vastuvõtjatele märku.

See signaal peab seejärel juhtima 12 V alalisvoolumootori suunda. Tööriista kõrguse reguleerimiseks pöörleb mootor keermestatud varda edasi-tagasi.
Sellest, mida ma avastasin, oleks mitu paralleelselt ühendatud fotodioodi, üks komplekt laseri tuvastamiseks üle nulli ja teine selle taseme all. Nulltase on vaid mingi paus fotodioodide vahel, et süsteem ei ärkaks. Ilma ekraanita lasersensor. Andsin ainult pildifoto.
Mul on vaja H-silla vooluahelat, kuid kõiki minu poolt leitud on mõeldud kasutamiseks Arduino süsteemiga. Vajadusel saan osta valmis silla mõistliku hinnaga kuni 30 dollarit
Ideaalis töötaks see nii punase kui ka rohelise laseriga, kuid lainepikkused on nii erinevad, et ma kahtlen, kas seda saaks teha ja see ei töötaks kogu valgusspektris.
Esialgu tahaksin selle tala mootorite külge kinnitada üles-alla nuppude abil. Mul oleks hea meel, kui teine mootor end selle püstitamise ajal güroskoobiga tasandaks, kuid ilma Arduinota võib see olla väga keeruline.
Ma tunnen, et see, mida ma proovin teha, on nii lihtne, et saan Arduino kasutamiseta minema. Ja ma nõuan analoogi, kuna ehitusel on rasked tingimused ja mulle tundub, et mida rohkem elektroonikat, seda ebausaldusväärsem on seade.
See töötab ainult siseruumides ja laseri kaugus on maksimaalselt 10 m. Mootori, mille alguses leidsin, on suur voolutarve 200mA max 2,19 A, aga ka suur pöördemoment.
Toide 18 V DC Makita akust.
Täname juba ettepanekute eest.
Tervitused Poolast
Rafal
Swag : Mul on segadus mootorite võllide töös. Mõlema mootori keermestatud kruvi surub tööriista, kuid see ei saa seda tagasi tõmmata? Kuidas see välja tuleb?
Kas sama saab rakendada ühe mootoriga?
Härra. Rafal: Madalamad tasandavad sirgjooned oleksid ehk 70 cm, ainult väikeste ruumide jaoks, nt. tualett, et saaksite uksest sisse astuda.
Masin ilma ajamita, käsitsi tõmmatud, ainult tasandavad sirgjooned. Videol on mastide kaks kollast objekti sirgete külge jäigalt kinnitatud laserdetektorid.
Laser seisab kusagil kaugemal ja see tekitab horisontaalse joone.
Mootorid kinnitatakse käru külge ja keermestatud kruvi sirgete tasandamiseks laserdetektoritega. Mõlema külje tasandamiseks peab olema kaks mootorit, kuid see on peegelpilt.
Ainus ühine osa oleks kahekanaliline H-sild, nagu teeksin seda juba valmis moodulist ja võimalik, et ka güroskoobist, aga see on unistus :).
On oluline, et vasakpoolse ja parema mootori pöörete jaoks oleks nupp.
Menetlus on selline. Riputan laseri näiteks 2 m üle ettenähtud põranda taseme. Mõõdan laserkiirest sirgete alumise servani 2 meetrit.
Reguleerin kõrguse vajutamise nuppe, lülitid paremale-vasakule, nii et see oleks võrdne sirgete alumise servaga 2 meetrit. Panin detektorid mastidele nii, et laserkiir oleks fotodioodilõikude vahel nulltasemel. Ja ülejäänud saavad ise hakkama
Manusesse panin detektori töö joonise.
Rafal
Vooluahela kujundus

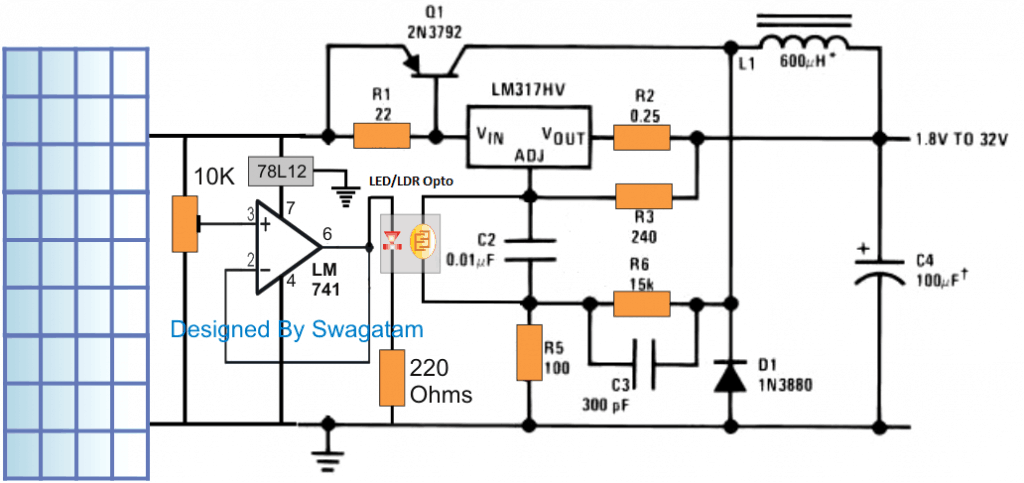
Vaadates ülaltoodud joonist, on vaja kahte sellist identset vooluringi astet, et tuvastada ja korrigeerida seotud mootoriga juhitavat tööriista laserjoone sirguse täpsuse suhtes.
Kaks identset etappi on üksteise peegelpildid, nagu allpool näidatud:

Skeem on üsna sirgjooneline. See töötab aknakomparaatoriga, mis tagab ajamimootorite mittetöötamise seni, kuni LDR-de paar on eksponeeritud ühesuguse laserjoone heledusega.
Seejärel genereeritakse pool toitepingest A1 mitteinverteerivale sisendile ja A2 inverteerivale sisendile.
Niipea kui tuvastatakse laserjoone läbipaine (mis võib juhtuda, kui mootoriga juhitav tööriist pole sirgelt joondatud), muutub LDR-sid R1 ja R2 mõjutav heledus.
Selles olukorras eemaldub akna võrdlusseadme sisendpinge poolest toitepingest. See olukord põhjustab võrdlusväljundi käsu mootorsilla võrgule mootori liigutamiseks päripäeva või vastupäeva.
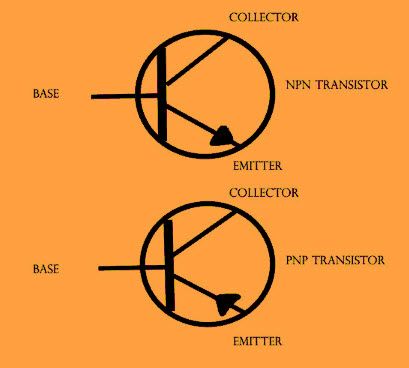
Transistorid T1. . . T4 on konfigureeritud nagu sildvõrk, et võimaldada mootori sisselülitamist edasi ja tagasi suundades sõltuvalt LDR valgustusest või laserjoone kõrvalekaldenurgast.
Dioodid D1. . . D4 on paigutatud tühistama pinge piigid, mis tekivad mootori avatiivse ja töötava aja jooksul. Eelseadistatud potentsiomeetrite P1 ja P2 funktsioon on hõlbustada joondamise reguleerimist.
Need on täpsustatud, et tagada mootori täielik väljalülitamine ja passiivsus seni, kuni asjaomane LDR paar on täpselt sama laservalguse heleduse käes.
Oletame näiteks, et mootoriga juhitava tööriista vale joondamise tõttu põhjustab laseri joone kallutamine valguse vähenemist LDR R2-l kui LDR R1. Selle tulemusel tõuseb pinge punktis A üle poole toitepingest.
Selles olukorras muutub A1 op-võimendi väljund kõrgeks, sundides transistore T1 ja T4 töötama. See omakorda paneb mootori pöörlema vastavas suunas. See toiming nihutab ühendatud tööriista automaatselt sirgjooneliselt, kuni selle horisontaalse joondamise täpsus langeb kokku laserjoone täpsusega.
Ja vastupidi, kui eeldame, et tööriista kallutatakse vastupidises suunas, nii et LDR-de valgustus on ülalpool käsitletu suhtes vastupidine, põhjustab punkti A pinge languse alla pool toitepingest. See tingimus käivitab väljundi A2 op võimendi kõrgeks, nii et T3 ja T2 hakkavad tööle.
Selle tulemusel töötab mootor nüüd vastupidises suunas, püüdes korrigeerida tööriista vastavas suunas asetamist, kuni see muutub täiesti sirgeks ja langeb kokku laserjoone horisontaalse täpsusega.
Nupp Üles / alla
Kõrgtaseme kõrguse esialgseks eelseadistamiseks mõeldud üles-alla nuppe saab lihtsalt rakendada, ühendades juhtnupud paralleelselt iga LDR-iga.
LDR-i installimine
LDR-idelt õige vastuse saamiseks peavad vasakpoolsed parempoolsed paarid olema paigaldatud toru (näiteks korpuse) sisse nii, et nad näeksid ainult laservalgust, mitte muud ümbritsevat valgust.
Idee tunnistajaks on järgmine pilt:

Siin näeme, et LDR-id on paigutatud üksteisele väga lähedale, mis tagab, et kui laserjoon asub täpselt keskel, valgustub osa mõlemast LDR-paarist laservalgusega ühtlaselt.
LDR-i korpuse esiosa võiks katta hajutatud läätsega, nii et laservalgustus oleks hajutatud seestpoolt vastavate LDR-de vahel ühtlaselt.
Eelmine: Väärtuslike esemete kaitsmiseks lihtne vargusevastane häireahel Järgmine: Universaalne BJT, JFET, MOSFET Tester Circuit