
Arvutamisel võib CAN-liides olla jagatud piiriks süsteemivestluse teabe kahe eraldi osa vahel. Vestlust saab teha arvuti riistvara, tarkvara, inimeste, välisseadmete ja nende kombinatsioonide vahel. Mõni arvuti riistvara nagu puutetundlik ekraan, sest puutetundlik ekraan saab teavet jagada ja vastu võtta liidese kaudu, samas kui muud seadmed, näiteks mikrofon, on hiir ainult üks viis. Liidesed on peamiselt kahte tüüpi nagu riistvara liidestamine ja tarkvara liidestamine. Riistvaraliideseid kasutatakse paljudes seadmetes, nagu sisend-, väljund-, siini- ja salvestusseadmed. Selle CAN-liidese saab määratleda loogikasignaalide abil. Tarkvaraliides võib olla saadaval laias valikus ja erinevatel tasanditel. OS võib liidestuda riistvara erinevate osadega. Programmid või rakendused Operatsioonisüsteemil võib tekkida vajadus suhelda voogude ja objektorienteeritud programmeerimise kaudu peavad mis tahes rakenduse objektid meetodite kaudu suhtlema.

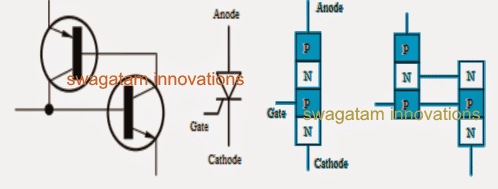
SAAB BUSSI
CAN-buss töötati välja 1983. aastal Robert Bosch GmbH-s. See protokoll avaldati 1986. aastal Michiganis Detroitis SAE kongressil (Autotehnika Inseneride Selts). Esimene CAN-protokoll toodeti Philipsi ja Inteli poolt ning see ilmus turule aastal 1987. Kuid BMW seeria-8 oli esimene sõiduk, millel oli CAN-protokollil põhinev multipleksjuhtmete süsteem.

SAAB BUSSI
Täielik vorm CAN on kontrolleri piirkonnavõrk . See on ühte tüüpi sõidukibuss, mis on mõeldud peamiselt erinevate sõidukite jaoks seadmed ja mikrokontrollerid ilma hostarvutita omavahel suhelda. See protokoll põhineb teatel ja on mõeldud peamiselt autode elektrijuhtmeteks. Bosch avaldas CAN-i erinevaid versioone ja 1991. aastal ilmus uusim CAN 2.0.
CAN koosneb kahest osast, näiteks A- ja B-osast, kus A-osa on 11-bitine identifikaator ja see on standardses vormingus. B osa on 29-bitine identifikaator ja see on laiendatud vormingus. 11-bitiseid identifikaatoreid kasutavat CAN-i nimetatakse AN 2.0A ja 29-bitiseid identifikaatoreid kasutavat CAN-i CAN 2.0B
CAN-i ühendamine USB-ga
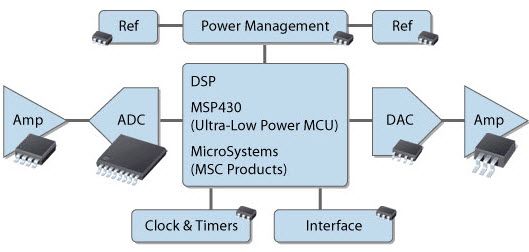
CAN-i ühendamine USB-ga on lihtne seade, mida kasutatakse CAN-siini jälgimiseks. See seade kasutab mikroprotsessorit NUC140LC1CN 32 K Cortexes-M0. Sellel on nii CAN- kui ka USB-välisseadmed.
CAN-i ja USB-liidese peamised omadused on
- Kujundamine on väga lihtne
- Sobib hästi protokolli LAWICELI KANUSB
- Eksponeerimine sellise seadmena nagu FTDI USB
- See toetab CAN 2.0B 29-bitiseid ja CAN 2.0A 11-bitiseid raame
- See koosneb sisemisest sõnumipuhvrist (FIFO CAN)
- See töötab USB-porti
- Püsivara värskenduste jaoks kasutatakse massmäluseadet (Flash-resident USB)
Skemaatiline diagramm
CAN-i ja USB-liidese vooluahela konfiguratsioon on näidatud allpool. CAN-trafot kasutatakse NUC140 CAN-seadme CAN-siiniga suhtlemiseks. Kiip TJA1051T lahendab eesmärgi NXP-st. Mikroprotsessor NUC140 on võimeline töötama 5 V toiteallikaga, lisaks pole vaja täiendavat 3,3 V pingeregulaatorit. See mugav korraldus teeb lihtsa ülesande CAN-i USB-liidese rakendamiseks.

Skemaatiline diagramm
Vooluahel on ehitatud kolme oleku LED-iga, nimelt D1, D2 ja D3.
- Siin ütleb D1 dioodi olek, et USB on hostiga ühendatud
- D2-dioodi olek ütleb siin CAN-siini aktiivsuse
- CAN-siini vigu saab näidata D3-dioodiga
NUC140 mikroprotsessoril pole integreeritud alglaadurit ja parim viis programmeerimiseks on ainult Nuvoton ICP programmeerija ja ARM SWD (Serial Wire Debug) liides. Kui alglaadur on varem mõne programmiga välja visatud, võib see käivituda. JP1 ühendamine enne liidese toiteks käivitab alglaaduri.
Buutilaadur
Mikroprotsessori NUC140LC1 välkmälu on jagatud kahte ossa. Nad täidavad kasutajaprogrammi koodi ja alglaadijat. Alglaaduri ja käivitava kasutajaprogrammi suurus on 4K ja 32K. Siin kasutatakse Nuvotoni massmäluseadme (MSD) alglaadijat täisfunktsionaalse USB-laaduri ehitamiseks. Alglaadija aktiveerub JP1 hüppaja ühendamisega. Nii et lõpuks peab eemaldatav draiv olema nähtav hosti failisüsteemis 32KB suurusega. Lihtsalt kopeerige ja kleepige CAN-i värskendus USB-püsivara alglaadimisseadmesse. Ühendage USB-kaabel lahti, ühendage hüppaja ja ühendage see uuesti. Uue püsivara värskendus peaks nüüd töötama.

Buutilaadur
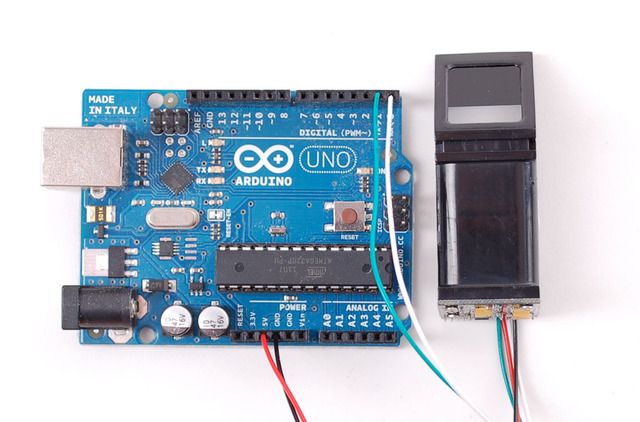
USB-liidese programmeerimine ja NuTiny-SDK-140
Mikroprotsessori programmeerimine NUC140 vajab Nuvoton ICP programmeerimisrakendust ja Nuvotoni Nu-Linki programmeerijat. Kuid siin on NuTiny-SDK-140 (NUC140 demoplaat) saadaval Digi-Key'st. See koosneb kahest osast, näiteks Nu-Linki programmeerijatest ja NUC140 kiibiga osast. See laud on isegi Nu-Linki osa eraldamiseks augustatud. Tegelikult saate selle seadme kujundada ainult NUC140 demoplaadi ümber, ainus täiendav CAN-transiiveri kiip on hädavajalik.

NUC140 juhatus
Seega on see kõik seotud CAN-i liidesega USB-ga, CAN-siiniga, CAN-i ühendamisega USB-ga, skemaatiline diagramm, alglaadur ja NUC140 mikroprotsessor. Loodame, et olete sellest kontseptsioonist paremini aru saanud. Lisaks esitage selle artikliga seotud küsimuste kohta oma väärtuslikud ettepanekud, kommenteerides allolevas kommentaaride jaotises. Siin on teile küsimus, millised on CAN-liidese rakendused?
Foto autorid:
- CAN USB-liidesesse saelig
- SAAB BUSSI canbuskit
- NUC140 juhendatavad








{kind=link}
{kind=link}
{kind=link}