Ajavahemikul 18thsajandil toimus DC mootorite areng. Alalisvoolumootorite väljatöötamine on laialdaselt edenenud ja neid rakendatakse märkimisväärselt paljudes tööstusharudes. 1800-ndate aastate algul ja 1832. aastal tehtud täiustustega arendas alalisvoolumootoreid välja algselt Briti teadlane Sturgeon. Ta leiutas alalisvoolumootori algse kommutaatori tüübi, kus see suudab ka masinaid simuleerida. Võib aga mõelda, mis on alalisvoolumootori funktsionaalsus ja miks on vaja teada alalisvoolumootori kiiruse juhtimist. Niisiis, see artikkel selgitab selgelt selle toimimist ja erinevaid kiiruse reguleerimise tehnikaid.
Mis on alalisvoolumootor?
Alalisvoolumootorit juhitakse alalisvoolu abil, kus see muundab vastuvõetud elektrienergia mehaaniliseks energiaks. See käivitab seadme enda pöörleva muutuse, andes seega energiat erinevate rakenduste käitamiseks mitmes domeenis.
Alalisvoolumootori kiiruse reguleerimine on mootori üks kõige kasulikumaid omadusi. Mootori kiiruse reguleerimisega saate mootori kiirust vastavalt nõuetele muuta ja saada vajalik töö.
Kiiruse juhtimismehhanism on rakendatav paljudel juhtudel, näiteks robotisõidukite, mootorite liikumise kontrollimine paberivabrikus ja mootorite liikumine liftides, kus erinevat tüüpi alalisvoolumootorid kasutatakse.
Alalisvoolumootori tööpõhimõte
Lihtne alalisvoolumootor töötab põhimõttel, et kui voolu kandev juht asetatakse a magnetiline ustav d, see kogeb mehaanilist jõudu. Praktilises alalisvoolumootoris on ankur voolu kandev juht ja väli annab magnetvälja.
Juhi (armatuuri) vooluga varustamisel tekitab see oma magnetvoo. Magnetvoog kas liidab ühes suunas olevate välimähiste tõttu tekkiva magnetvoo või tühistab välimähiste tõttu tekkiva magnetvoo. Magnetvoo akumuleerumine ühes suunas võrreldes teisega avaldab juhile jõudu ja seetõttu hakkab see pöörlema.
Faraday elektromagnetilise induktsiooni seaduse järgi tekitab juhi pöörlev toime an EMF . See EMF kipub Lenzi seaduse kohaselt vastanduma põhjusele, s.t tarnitud pingele. Seega on alalisvoolumootoril väga eriline omadus reguleerida selle pöördemomenti tagumise EMF-i tõttu erineva koormuse korral.
Miks alalisvoolumootori kiiruse juhtimine on oluline?
Masina kiiruse reguleerimine näitab mõju mootori pöörlemiskiirusele, kui see mõjutab otseselt masina funktsionaalsust ja on nii oluline jõudluse ja tulemuslikkuse jaoks. Puurimise ajal on igat liiki materjalil oma pöörlemiskiirus ja see muutub ka puuri suuruse järgi.
Pumba paigaldamise stsenaariumi korral toimub läbilaskevõime muutus ja seetõttu peab konveierilint olema sünkroonis seadme funktsionaalse kiirusega. Need tegurid sõltuvad kas otseselt või kaudselt mootori kiirusest. Seetõttu tuleks kaaluda alalisvoolumootori pöörlemiskiirust ja järgida erinevat tüüpi kiiruse reguleerimise meetodeid.
Alalisvoolumootori kiiruse reguleerimine toimub kas töötaja poolt käsitsi või mis tahes automaatse juhtimistööriista abil. See näib olevat vastuolus kiirusepiiranguga, kus võlli koormuse varieerumise tõttu peab kiiruse reguleerimine olema vastupidine loomulikule kiiruse muutusele.
Kiiruse juhtimise põhimõte
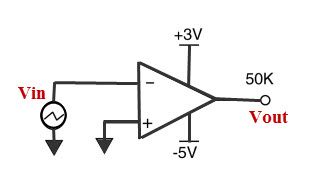
Ülaltoodud jooniselt on pinge võrrand lihtne Alalisvoolumootor on
V = Eb + IaRa
V on varustatud pinge, Eb on tagumine EMF, Ia on armatuuri vool ja Ra on armatuuri takistus.
Me teame seda juba
Eb = (PøNZ) / 60A.
P - postide arv,
A - konstantne
Z - juhtide arv
N - mootori kiirus
Asendades pinge võrrandis Eb väärtuse, saame
V = (PøNZ) / 60A) + IaRa
Või V - IaRa = (PøNZ) / 60A
st N = (PZ / 60A) (V - IaRa) / ø
Ülaltoodud võrrandi võib kirjutada ka järgmiselt:
N = K (V - IaRa) / ø, K on konstant
See tähendab kolme asja:
- Mootori kiirus on otseselt proportsionaalne toitepingega.
- Mootori kiirus on pöördvõrdeline armatuuri pingelangusega.
- Mootori kiirus on põllul leidude tõttu pöördvõrdeline vooga
Seega saab alalisvoolumootori kiirust juhtida kolmel viisil:
- Toitepinge muutmisega
- Muutes voogu ja muutes voolu läbi välimähise
- Muutes armatuuri pinget ja muutes armatuuri takistust
Alalisvoolumootori kiiruse juhtimise mitu tehnikat
Kuna alalisvoolumootoreid on kahte tüüpi, käsitleme siin selgelt nii alalisvoolu seeria kui ka kiiruse reguleerimise meetodeid šundimootorid.
Alalisvoolumootori kiiruse juhtimine seeriatüüpides
Seda saab jagada kahte tüüpi ja need on:
- Armatuuriga juhitav tehnika
- Välja kontrollitav tehnika
Armatuuriga juhitav tehnika liigitatakse veel kolme tüüpi
- Armatuuriga kontrollitav takistus
- Manööverdatud armatuuri juhtimine
- Armatuuri klemmi pinge
Armatuuriga kontrollitav takistus
Seda tehnikat kasutatakse kõige enam seal, kus reguleerimiskindlusel on järjestikune seos mootori toiteallikaga. Allpool olev pilt selgitab seda.

Armatuuri takistuse kontroll
Alalisvoolu seeria mootori juhtimistakistuse korral tekkivat võimsuskadu võib ignoreerida, kuna seda reguleerimistehnikat kasutatakse enamasti pikka aega, et vähendada kiirust kerge koormuse korral. See on püsiva pöördemomendi kulutõhus tehnika, mida rakendatakse peamiselt kraanade, rongide ja muude sõidukite juhtimisel.
Manööverdatud armatuuri juhtimine
Siin on reostaat armatuuriga nii seeria- kui ka manööverühenduses. Armatuurile rakendatav pingetase muutub ja see varieerub seeria muutmisega reostaat . Kusjuures ergutusvoolu muutus toimub šundi reostaadi vahetamise teel. See alalisvoolumootori kiiruse reguleerimise tehnika ei ole nii kulukas, kuna kiiruse reguleerimise takistustes on märkimisväärsed võimsuskadud. Kiirust saab mingil määral reguleerida, kuid mitte üle tavalise kiiruse taseme.

Manööverdatud armatuuri alalisvoolumootori kiiruse juhtimise meetod
Armatuuri klemmi pinge
DC-seeria mootori pöörlemiskiirust saab teha ka mootori toiteallika kaudu, kasutades individuaalset varieeruvat toitepinget, kuid see lähenemine on kulukas ja seda ei rakendata ulatuslikult.
Välja kontrollitav tehnika liigitatakse lisaks kahte tüüpi:
- Põllu suunaja
- Koputatud välja juhtimine (koputatud välja juhtimine)
Väliujurite tehnika
See tehnika kasutab suunajat. Väljas asuvat voo kiirust saab vähendada mootori voolu osa seeriaväljal manööverdamise teel. Mida väiksem on suunaja takistus, seda vähem on välivool. Seda tehnikat kasutatakse rohkem kui tavalisel kiiruste vahemikul ja seda rakendatakse elektriajamites, kus kiirus suureneb koormuse vähenemise korral.

Välisuunaja alalisvoolumootori kiiruse juhtimine
Koputatud välja juhtimine
Siin suurendatakse ka voo vähendamisega kiirust ja see saavutatakse välimähise pöörete vähendamise teel sealt, kus toimub voolu voog. Siin võetakse välimähises koputamiste arv välja ja seda tehnikat kasutatakse elektritraktsioonides.
Alalisvoolu šundimootori kiiruse juhtimine
Seda saab jagada kahte tüüpi ja need on:
- Välja kontrollitav tehnika
- Armatuuriga juhitav tehnika
Alalisvoolu manöövrimootori väljajuhtimise meetod
Selles meetodis varieeritakse välimähistest tingitud magnetvoo mootori kiiruse muutmiseks.
Kuna magnetvoog sõltub välja mähist läbivast voolust, saab seda muuta, muutes voolu läbi välimähise. Seda on võimalik saavutada muutuva takisti kasutamisega jadamisi välitakistiga.
Esialgu, kui muutuvat takistit hoitakse minimaalses asendis, voolab nimivool nimiväljundpinge tõttu läbi välimähise ja selle tulemusel hoitakse kiirust normaalsena. Kui takistust suurendatakse järk-järgult, väheneb välimähise läbiv vool. See omakorda vähendab toodetud voogu. Seega suureneb mootori kiirus üle selle normaalväärtuse.
Alalisvoolu šundimootori armatuuri takistuse juhtimismeetod
Selle meetodi abil saab alalisvoolumootori pöörlemiskiirust reguleerida armatuuri takistuse juhtimisega, et kontrollida armatuuri pingelangust. See meetod kasutab ka armatuuriga järjestikku muutuvat takistit.
Kui muutuv takisti saavutab minimaalse väärtuse, on armatuuri takistus normaalsel tasemel ja seetõttu armatuuri pinge langeb. Kui takistuse väärtust järk-järgult suurendatakse, väheneb armatuuri pinge. See viib omakorda mootori kiiruse vähenemiseni.
Selle meetodi abil saavutatakse mootori kiirus normaalsest vahemikust madalamal.
Alalisvoolu šundimootori armatuuri pinge juhtimise meetod (Ward Leonardi meetod)
Ward Leonardi tehnika Alalisvoolumootori kiiruse juhtimisahel on näidatud järgmiselt:
Ülaltoodud pildil on M peamine mootor, mille pöörlemiskiirust tuleb reguleerida, ja G vastab individuaalselt ergastatud alalisvoolugeneraatorile, kus seda juhitakse kolmefaasilise mootori abil ja see võib olla kas sünkroon- või asünkroonmootor. Seda alalisvoolugeneraatori ja vahelduvvoolu mootoriga kombinatsiooni mustrit nimetatakse M-G komplektiks.
Generaatori pinget varieeritakse generaatori väljavoolu muutmisega. See pinge tase, kui see antakse alalisvoolumootori armatuuri sektsiooni ja seejärel M, varieerub. Mootorivälja voo konstantsena hoidmiseks tuleb mootori väljavool hoida konstantsena. Kui mootori pöörlemiskiirust reguleeritakse, peab mootori armatuuri vool olema sama mis nimitasemel.
Toodud väljavool on erinev, nii et pinge armatuuri tase varieerub vahemikus 0 kuni nimitase. Kuna kiiruse reguleerimine vastab nimivoolule ning mootori püsivale väljavoolule ja väljavoole kuni nimipöörlemiskiiruse saavutamiseni. Kuna võimsus on kiiruse ja pöördemomendi korrutis ning sellel on otsene proportsioon kiirusega. Sellega, kui võimsus suureneb, suureneb kiirus.
Mõlemad ülalnimetatud meetodid ei võimalda kiiruse reguleerimist soovitud vahemikus. Pealegi võib voo juhtimise meetod mõjutada kommutatsiooni, samas kui armatuuri juhtimismeetodiga kaasneb tohutu võimsuskadu, kuna selle abil kasutatakse armatuuri jadatakistit. Seetõttu on sageli soovitav teistsugune meetod - see, mis juhib toitepinget mootori pöörete reguleerimiseks.
Sellest tulenevalt omandatakse Ward Leonardi tehnikaga reguleeritav jõuülekanne ja pöördemomendi püsiväärtus minimaalsest kiirusetasemest baaskiiruse tasemeni. Välivoo reguleerimise tehnikat kasutatakse peamiselt siis, kui kiiruse tase on suurem kui põhikiirus.
Siin, funktsionaalsuses, hoitakse armatuuri voolu konstantsel tasemel määratud väärtusel ja generaatori pinge väärtust hoitakse konstantsena. Sellise meetodi korral saab välimähis fikseeritud pinge ja armatuur muutuva pinge.
Üks selline pinge juhtimise meetodi tehnika hõlmab armatuurile muutuva pinge andmiseks lülitimehhanismi kasutamist ja teine kasutab vahelduvvoolu mootoriga generaatorit armatuuri muutuva pinge pakkumiseks ( Ward-Leonardi süsteem ).
The koguduse eelised ja puudused Leonard metho d on:
Ward Leonardi tehnika alalisvoolumootori kiiruse juhtimisel kasutamise eelised on järgmised:
- Mõlemas suunas saab seadme kiirust sujuvalt juhtida laiendatud vahemikus
- Sellel tehnikal on sisemine pidurdusvõime
- Järgnevad reaktiivvoldi amprid tasakaalustatakse ajami abil ja ulatuslikult ergastatud sünkroonmootor toimib ajamina, nii et võimsustegur suureneb
- Vilkuvate koormuste korral on ajamimootor asünkroonmootor millel on hooratas, mida kasutatakse vilkuvate koormuste vähendamiseks minimaalsele tasemele
Ward Leonardi tehnika puudused on:
- Kuna sellel tehnikal on mootorite ja generaatorite komplekt, on kulud suuremad
- Seadet on keeruline disainida ja sellel on ka raskekaalu
- Vajad installimiseks rohkem ruumi
- Nõuab regulaarset hooldust ja vundament ei ole kulutõhus
- Tuleb tohutuid kaotusi ja nii väheneb süsteemi efektiivsus
- Tekib rohkem müra
Ja Ward Leonardi meetodi rakendamine on sujuv alalisvoolumootori kiiruse reguleerimine. Mõned näited on kaevandustõstukid, paberiveskid, liftid, valtspingid ja kraanad.
Peale nende kahe tehnika on kõige enam kasutatav tehnika alalisvoolumootori kiiruse reguleerimine PWM abil alalisvoolumootori kiiruse reguleerimise saavutamiseks. PWM hõlmab mootorile rakendatava pinge reguleerimiseks erineva laiusega impulsse. See meetod osutub väga tõhusaks, kuna voolukatkestus on minimaalne ja see ei hõlma keerukate seadmete kasutamist.

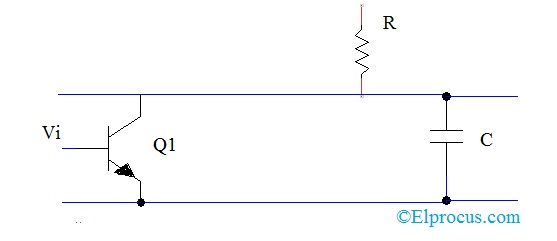
Pinge juhtimise meetod
Ülaltoodud plokkskeem tähistab lihtsat elektrimootori kiiruse regulaator . Nagu ülaltoodud plokkskeemil on kujutatud, kasutatakse mikrokontrollerit PWM-signaalide edastamiseks mootori juhile. Mootorijuht on L293D IC, mis koosneb H-silla ahelatest mootori juhtimiseks.
PWM saavutatakse mootori juhi IC lubatavale tihvtile rakendatud impulsside muutmisega mootori rakendatud pinge juhtimiseks. Impulsside varieerimine toimub mikrokontrolleri abil, sisestades signaali nuppudelt. Siin on kaks nuppu, millest kumbki impulsside töötsükli vähendamiseks ja suurendamiseks.
Niisiis, see artikkel on üksikasjalikult selgitanud alalisvoolumootori kiiruse reguleerimise erinevaid tehnikaid ja seda, kuidas pöörlemiskiirust kõige olulisem jälgida. Lisaks on soovitatav teada 12v alalisvoolu mootori kiiruse regulaator .