
Esimese liikumisanduri leiutas 1950. aastate alguses Samuel Bango ja see oli sissemurdmishäire. Ta rakendas ultrahelilainetele radari põhialuseid - tulekahju või varga avastamise sagedust ja seda, mida inimesed ei kuule. Samueli liikumisandur põhineb Doppleri efekti põhimõttel. Tänapäeval töötavad enamik liikumisandureid Samuel Bango detektori põhimõttel. IR-andurid ja mikrolaineandurid suudavad liikumist tuvastada nende poolt väljastatavate sageduste muutuste kaudu.
Liikumisandureid kasutatakse turvasüsteemidena pankades, kontorites ja kaubanduskeskustes ning ka sissetungijate häirena kodus. Valitsevad liikumisandurid suudavad tõsised õnnetused peatada, tundes detektori vahetus läheduses olevaid inimesi. Liikumisandureid võime jälgida kaubanduskeskustes või automaatsete ustega kauplustes. Liikumisanduri vooluahela põhielement on topelt-infrapuna peegeldav andur või mõni muu detektorandur.

Liikumisandur
Liikumisanduri anduri tüübid
Liikumisandur on seade, mis tuvastab inimeste või liikuvate objektide liikumise ning annab peakontrollerile sobiva väljundi. Üldiselt kasutavad liikumisandurid erinevaid andureid nagu IR-andurid, ultraheliandurid, mikrolaineandurid ja passiivsed infrapunaandurid. Neid liikumisanduri andureid mainitakse allpool.
1. Passiivne infrapunaandur (PIR)

PIR-andur
PIR-andurid tuvastavad inimese kehasoojus, kui inimene satub vahetusse lähedusse. Need andurid on väikesed, väikese võimsusega, odavad ja hõlpsasti kasutatavad. Nendel põhjustel kasutatakse PIR-andureid tavaliselt vidinates, kodumasinates, äriettevõtetes, tööstusharudes jne. PIR annab liikumise tuvastamisel digitaalse väljundi. See koosneb püroelektrilisest andurist, mis tuvastab inimestelt eralduva infrapunakiirguse.
2. Ultraheliandurid

ultraheliandurid
Üldiselt nimetatakse ultraheliandureid ka anduriteks ja neid andureid kasutatakse liikuva objekti peegelduse mõõtmiseks. Kui ultraheliandurile rakendatakse elektrilise impulsi kujul pinget, vibreerib see teatud sageduste spektriga ja tekitab helilaineid. Kui mõni takistus satub ultrahelianduri spektrisse, siis helilained peegelduvad tagasi (kajad) ja protsess tekitab elektrilise impulsi. Seega tuvastatakse nende kajamustritega objekti liikumine.
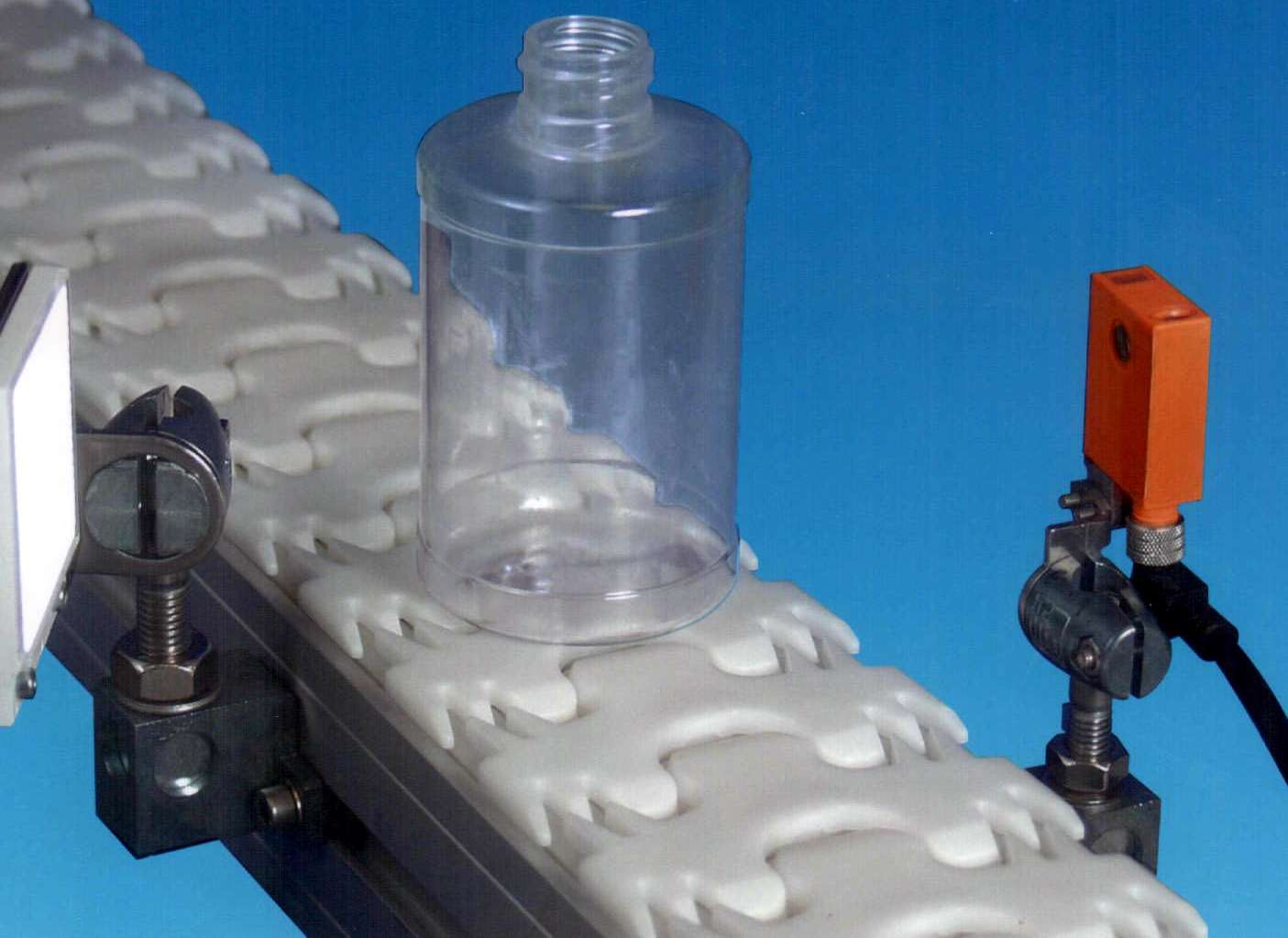
3. IR-andurid

IR-andur
IR-andur on elektrooniline seade, mis kiirgab või tuvastab IR-kiirgust, et tajuda selle tausta aspekte. See koosneb IR-valgusallikast, mis kiirgab valgust koos IR spetsiifilised lainepikkused . Selle konkreetse infrapunakiire sageduse võtab vastu detektorahel, mis koosneb samuti optilisest komponendist infrapunakiirguse fokuseerimiseks ja spektraalse vastuse piiramiseks.
Liikumisanduri ahel
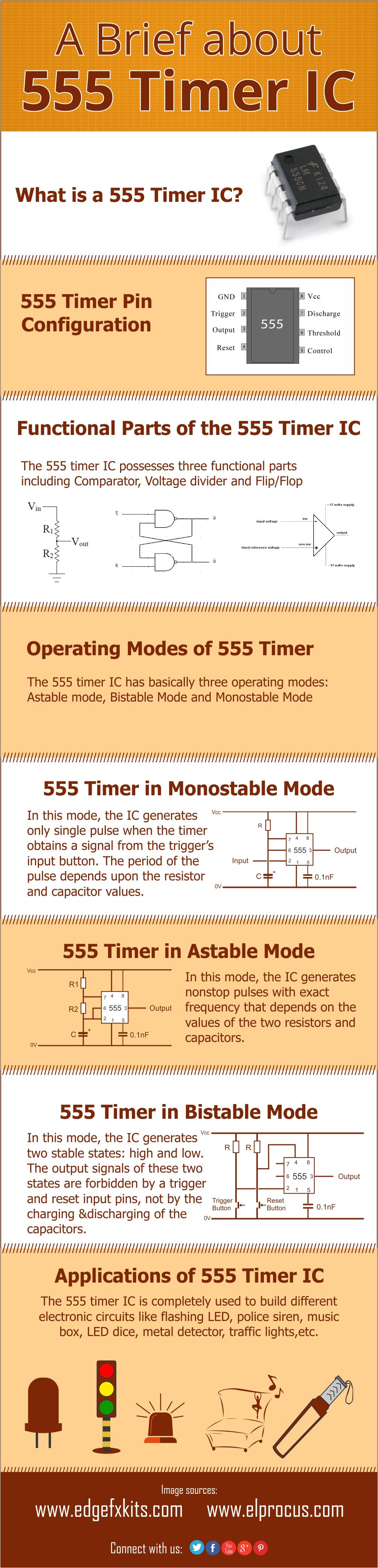
Liikumisanduri vooluahelat saab rakendada erinevate kontrollerite, näiteks 555 taimerite, mikrokontrollerite jne abil ning erinevate andurid nagu IR, PIR ja ülalkirjeldatud ultraheliandurid.
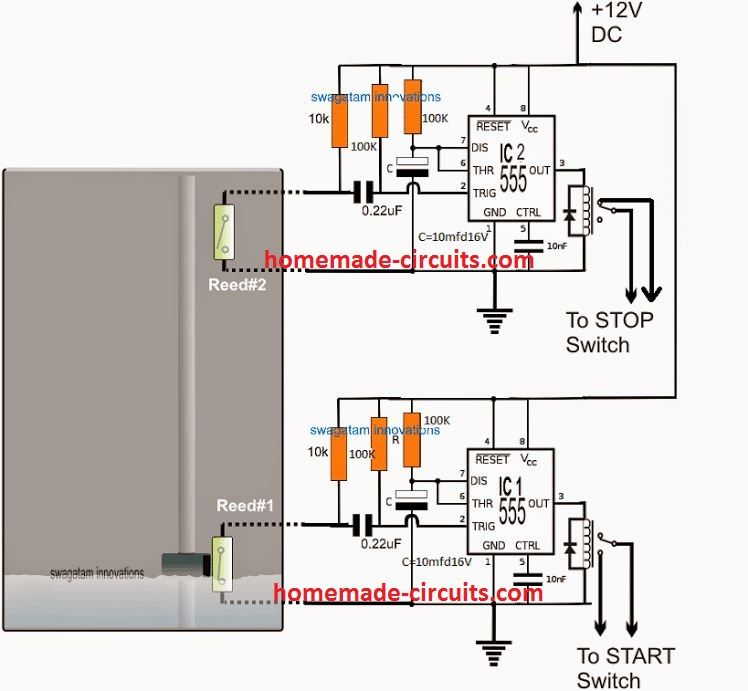
Liikumisanduri detektori lülitus taimeriga
Liikumisandur koosneb kahest sektsioonist: saatja ja vastuvõtja. Saatjaosas kasutatakse taimerit 555 ja IR-andureid, fototransistorit, veel 555 taimer ja alarmi kasutatakse vastuvõtja osas. Saatja sektsioonis genereerib IR-andur kõrgsageduslikku kiirt ja see sagedus sõltub taimeri RC-konstandist. Vastuvõtjaosas a fototransistor juhtivus võimaldab taimeri vooluringil tekitada alarmi kindla aja jooksul, mis sõltub ka RC konstandist.

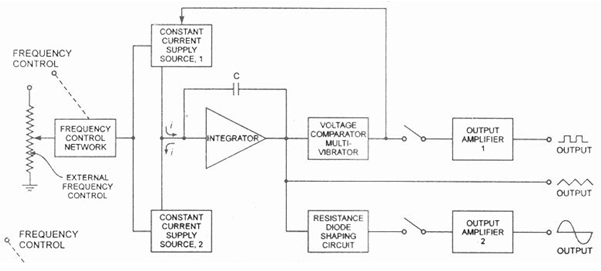
liikumisanduri plokkskeem

liikumisanduri vooluring
Mis tahes objekti liikumise tajumiseks paigutatakse IR-andur ja fototransistorid nii, et IR-LEDi poolt transistori suunas kiiratav kiir takistataks. Saatja sektsioonis tekitab IR-andur 555 taimeri abil 5 kHz kõrgsageduskiire, mis on seatud mitmevibraatori ebastabiilseks ja anduri poolt saatjas tekitatud sageduse võtab vastu fototransistor.
Kui IR-anduri ja fototransistori vahel pole katkestusi, on sagedus ühes faasis ja seetõttu ei anna see vooluahela vastuvõtja poolel ühtegi väljundit. Kui süsteemi vahel on häire infrapunaandur ja fototransistor, on transistori tuvastatud sagedus teises faasis. See käivitus paneb taimeri surisema. Nii saab liikumisanduri alarmi kavandada mitmele rakendusele.
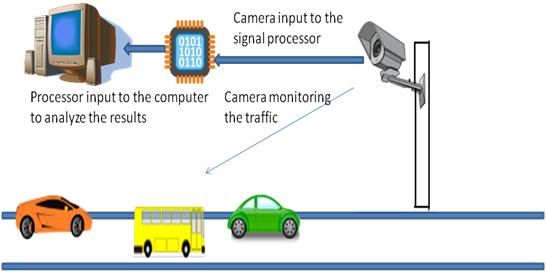
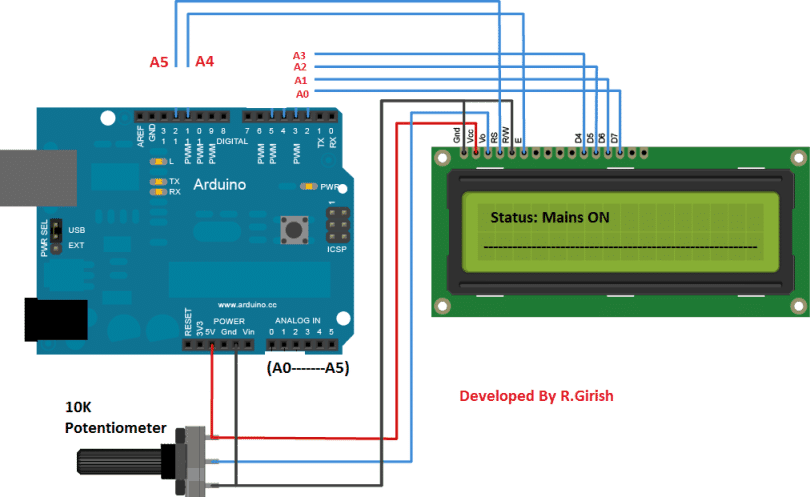
Liikumise tuvastamine mikrokontrolleri abil
Selles vooluringis kasutatakse a mikrokontroller kui põhikontroller sarnane ülaltoodud projekti taimeriga. See süsteem kasutab ultraheliandurit ka mis tahes objekti liikumise tuvastamiseks. Nagu me eespool arutlesime, tuvastab ultraheliandur objekti spetsiifilise spektri sagedusega helilainete abil. Seda objektide tuvastamine ultrahelianduri abil on selles projektis rakendatud uksepüstoli käitamiseks, mikrokontrollerit korralikult programmeerides.

liikumise tuvastamine mikrokontrolleri abil
Kui objekti ultraheliandur, mis töötab 40MHz helisagedusel, tajub objekti liikumist, annab see mikrokontrollerile katkestussignaalina signaale. Selle signaali vastuvõtmisega saadab mikrokontroller käsusignaalid transistori vooluringile, et juhtida uksepüstolit. Sellega ultraheli liikumise tuvastamine , saab uksepüstoli asemel kasutada mitut koormat, näiteks lampe, ventilaatoreid ja muid seadmeid.
Liikumisanduri vooluahela rakendused
Liikumistuvastust saab kasutada:
- Kontorid, pangad, kaubanduskeskused ja sissetungijate häire kodudes.
- Automaatne valguse juhtimine ja loendusmasinad.
- Paljud süsteemid meeldivad koduautomaatika süsteemid, energiatõhusad süsteemid ja juhtimissüsteemid ning automaatsed ukse avamissüsteemid
Seega lõpetatakse see artikkel liikumisanduri vooluringi ja selle tööpõhimõtete lühikirjelduse, selgituse ja teabega. Loodame, et teil on parem detektor ja arusaam liikumisandurist. Lisaks sellele võite selle artikli kohta küsida puutega juhitav projekt s, jagage palun oma arvamust selle artikli kohta allpool olevas kommentaaride jaotises.
Foto autorid
- Liikumisandur thomasnet
- PIR-andur sumeetinstrumendid
- Ultraheliandurid imimg
- IR-andurid sõnapress
- liikumisanduri plokkskeem ja vooluringi skeem elektroonikakeskus




{kind=link}
{kind=link}
{kind=link}