See robotkäe ahel, mida saab rakendada ka nagu robotkraana, töötab 6 servomootori abil ja seda saab juhtida mikrokontrolleri kaugjuhtimispult , kasutades Arduino-põhist 2,4 GHz-sidelinki.
Põhijooned
Kui ehitate midagi nii keerukat kui robotkäsi, peab see välja nägema moodne ja sisaldama paljusid täiustatud funktsioone, mitte ainult lihtsalt mänguasjadega sarnaseid funktsioone.
Kavandatud täieõiguslikku disaini on suhteliselt lihtne ehitada, kuid omistatakse sellele mõned täiustatud manööverdamisfunktsioonid, mida saab täpselt juhtida juhtmeta või kaugjuhitavate käskude abil. Disain sobib isegi tööstuslikuks kasutamiseks, kui mootoreid on asjakohaselt täiendatud.
Selle mehaanilise kraana nagu robotkäsi peamised omadused on:
- Pidevalt reguleeritav „käsi” üle 180 kraadi vertikaaltelje.
- Püsivalt reguleeritav küünarnukk üle 180-kraadise vertikaaltelje.
- Pidevalt reguleeritav näpistamine või haaramine üle 90-kraadise vertikaaltelje.
- Pidevalt reguleeritav „käsi” üle 180-kraadise horisontaaltasandi.
- Kogu robotisüsteem või kraanahoob on liikuv ja manööverdatav nagu a puldiga juhitav auto .
Töötlemata simulatsioon
Väheseid ülalkirjeldatud funktsioone saab vaadata ja mõista järgmise GIF-simulatsiooni abil:

Mootori mehhanismi positsioonid
Järgmine joonis annab meile selge pildi mootori erinevatest asenditest ja nendega seotud käigumehhanismidest, mis tuleb projekti elluviimiseks paigaldada:

Selles kujunduses hoiame asjad võimalikult lihtsad, nii et ka võhik saaks mootori / käigumehhanismide osas aru. ja keeruliste mehhanismide taha ei jää midagi.
Iga mootori tööd või funktsiooni saab mõista järgmiste punktide abil:
- Mootor nr 1 juhib roboti sõrme näpistamist või haardesüsteemi. Liikuv element on liigutuste jaoks otse hingestatud mootori võlliga.
- Mootor nr 2 juhib süsteemi küünarnuki mehhanismi. See on konfigureeritud lihtsa servaga egde-käigukastiga tõstmisliigutuse rakendamiseks.
- Mootor nr 3 vastutab kogu robotkäsi süsteemi vertikaalse tõstmise eest, seetõttu peab see mootor olema võimsam kui ülaltoodud kaks. See mootor on integreeritud ka käigumehhanismi abil vajalike toimingute teostamiseks.
- Mootor nr 4 juhib kogu kraanamehhanismi kogu 360-kraadise horisontaaltasapinna ulatuses, nii et õlg on võimeline kogu objekti kogu üles tõstma või tõstma päripäeva või vastupäeva radiaalne ulatus.
- Mootorid nr 5 ja 6 toimivad nagu kogu süsteemi kandva platvormi rattad. Neid mootoreid saab juhtida, liigutades süsteemi pingutuseta ühest kohast teise, samuti hõlbustab see süsteemi ida / lääne, põhja / lõuna liikumist, lihtsalt reguleerides vasak / parem mootorite kiirusi. Seda tehakse lihtsalt ühe kahest mootorist vähendades või peatades, näiteks parempoolse pöörde algatamiseks võib parempoolse mootori peatada või peatada, kuni pööre on täielikult teostatud või soovitud nurga all. Samamoodi tehke vasakpöörde algatamiseks sama vasakpoolse mootoriga.
Tagarattal pole seotud ühtegi mootorit, see on hingedega, et keskteljel vabalt liikuda ja esiratta manöövreid järgida.
Traadita vastuvõtja vooluring
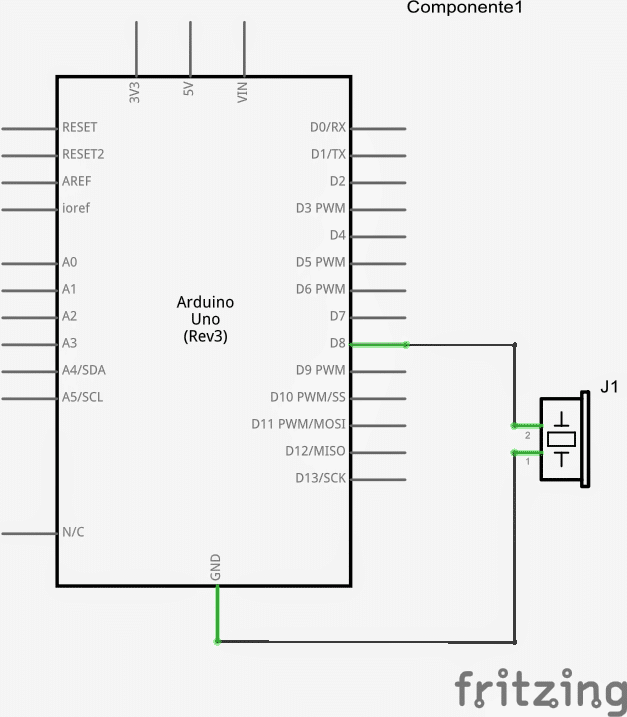
Kuna kogu süsteem on loodud töötama kaugjuhtimispuldiga, tuleb juhtmeta vastuvõtja konfigureerida ülaltoodud selgitatud mootoritega. Ja seda võib teha järgmise Arduino-põhise vooluringi abil.

Nagu näete, on Arduino väljunditega ühendatud 6 servomootorit ja kõiki neid juhitakse kaugjuhtimisega signaalide kaudu, mille on hõivanud lisatud andur NRF24L01.
See andur töötleb signaale ja suunab need Arduinole, mis edastab töötlemise asjakohasele mootorile kavandatud kiiruse juhtimiseks.
Signaalid saadetakse potentsiomeetritega saatja vooluringist. Nende potentsiomeetrite reguleerimine reguleerib ülalkirjeldatud vastuvõtja ahelaga kinnitatud korrigeerivate mootorite pöörlemiskiirust.
Nüüd vaatame, kuidas saatja vooluring välja näeb:
Saatja moodul

Saatja kujundust võib näha 6 potentsiomeetriga, mis on kinnitatud Arduino plaadiga ja ka teise 2,4 GHz sideside seadmega.
Kõik potid on programmeeritud vastava mootori juhtimine seotud vastuvõtja vooluringiga. Seega, kui kasutaja pöörleb saatja valitud potentsiomeetri võlli, hakkab robotkäe vastav mootor liikuma ja rakendama toiminguid sõltuvalt selle konkreetsest asendist süsteemis.
Mootori ülekoormuse juhtimine
Võite mõelda, kuidas piiravad mootorid nende liikumist kogu liikuva vahemiku ulatuses, kuna süsteemil puudub igasugune piirav seade, mis takistaks mootori ülekoormamist, kui vastavad mehhanismiliigutused jõuavad oma lõpp-punkti?
Mis tähendab näiteks seda, mis juhtub, kui mootorit ei peatata isegi pärast seda, kui „haare” on objekti kõvasti kinni hoidnud?
Lihtsaim lahendus sellele on lisada üksikisik praegused juhtmoodulid iga mootoriga nii, et sellistes olukordades jääb mootor sisselülitatuks ja lukustatuks ilma põlemata või ülekoormamata.
Aktiivse voolujuhtimise tõttu ei läbi mootorid ülekoormust ega ülevoolutingimusi ning nad töötavad jätkuvalt määratud ohutusalas.
Leiate täieliku programmi koodi selles artiklis
Eelmine: USB 5V helivõimendi arvutikõlaritele Järgmine: uuritud 7 modifitseeritud siinuslaine muunduri ahelat - 100 W kuni 3 kVA