Kavandatavat päikese optimeerija vooluringi saab kasutada päikesepaneelilt maksimaalse võimaliku väljundi saamiseks voolu ja pingena, vastusena erinevatele päikesevalguse tingimustele.
Selles postituses on selgitatud paari lihtsat, kuid tõhusat päikesepaneeli optimeerija laadimisahelat. Esimese saab ehitada, kasutades paari 555 IC-d ja mõnda muud lineaarset komponenti, teine optin on veelgi lihtsam ja kasutab väga tavalisi IC-sid nagu LM338 ja op amp IC 741. Õppigem protseduure.
Ringraja eesmärk
Nagu me kõik teame, on kõrgeima efektiivsuse saavutamine mis tahes tüüpi toiteallikast teostatav, kui protseduur ei hõlma toiteallika pinge manööverdamist, see tähendab, et me tahame omandada konkreetse nõutava madalama pinge ja maksimaalse voolu koormuse jaoks, mis on töötatakse ilma allika pingetaset häirimata ja soojust tekitamata.
Lühidalt, asjaomane päikese optimeerija peaks võimaldama väljundit maksimaalse nõutava vooluga, mis tahes nõutava pinge madalama tasemega, tagades samas, et paneeli kogu pinge ei muutuks.
Üks meetod, mida siin käsitletakse, hõlmab PWM-tehnikat, mida võib pidada üheks optimaalsemaks meetodiks seni.
Peaksime olema tänulikud sellele väikesele geeniusele nimega IC 555, mis muudab kõik rasked mõisted nii lihtsaks.
IC 555 kasutamine PWM-i teisendamiseks
Ka sellesse kontseptsiooni lisame nõutava rakenduse saamiseks paarist IC 555-st olulise sõltuvuse.
Vaadates antud skeemi, näeme, et kogu disain on põhimõtteliselt jagatud kaheks etapiks.
Ülemine pinge regulaatori aste ja alumine PWM generaatori aste.
Ülemine aste koosneb p-kanaliga mosfetist, mis on paigutatud lülitina ja vastab rakendatud PWM-i teabele selle väravas.
Alumine aste on PWM-generaatori aste. Kavandatud toimingute jaoks on konfigureeritud paar 555 IC-d.
Kuidas vooluring töötab
IC1 vastutab nõutavate ruudulainete tekitamise eest, mida töödeldakse konstantse vooluga kolmnurklainete generaatoriga, mis sisaldab T1 ja sellega seotud komponente.
See kolmnurkne laine rakendatakse IC2-le töötlemiseks vajalikeks PWM-ideks.
Kuid IC2-st pärinev PWM-i kaugus sõltub selle tihvti nr 5 pingetasemest, mis tuleneb 1K takisti ja 10K eelseadistuse kaudu kogu paneelist läbivast takistusvõrgust.
Selle võrgu vaheline pinge on otseselt proportsionaalne paneeli erineva voltiga.
Tipppingete ajal muutuvad PWM-id laiemaks ja vastupidi.
Ülaltoodud PWM-id rakendatakse mosfeti väravale, mis juhib ühendatud patareid ja tagab neile vajaliku pinge.
Nagu varem arutletud, tekitab paneel päikesepaiste ajal kõrgemat pinget, kõrgem pinge tähendab IC2, mis genereerib laiemaid PWM-e, mis omakorda hoiab mosfe pikemaks ajaks välja lülitatud või suhteliselt lühemaks ajaks, mis vastab keskmisele pinge väärtusele, mis võib aku klemmide ümber olema umbes 14,4 V.
Kui päike paistab, halvenevad PWM-id proportsionaalselt kitsalt, võimaldades mosfetil juhtida rohkem, nii et keskmine vool ja pinge akul kipuvad jääma optimaalsetele väärtustele.
10K eelseadistust tuleks reguleerida nii, et väljundklemmid jõuaksid ereda päikesepaiste korral ümber 14,4 V.
Tulemusi võib jälgida erinevates päikesevalguse tingimustes.
Kavandatav päikesepaneelide optimeerijaahel tagab aku stabiilse laadimise, ilma et see mõjutaks paneeli pinget ega vahetaks seda, mille tulemuseks on ka madalam soojusenergia tootmine.
Märkus. Ühendatud hüppepaneel peaks saama päikesepaiste ajal 50% rohkem pinget kui ühendatud aku. Voolutugevus peaks olema 1/5 aku AH hinnangust.

Kuidas vooluringi seadistada
- Seda võib teha järgmisel viisil:
- Esmalt hoidke S1 välja lülitatud.
- Pange paneel päikese kätte ja reguleerige eelseadistust, et saada vajalik optimaalne laadimispinge kogu mosfeti äravooludioodi väljundis ja maapinnal.
- Vooluring on nüüd kõik seatud.
- Kui see on tehtud, lülitage sisse S1, aku hakkab laadima parimas võimalikus optimeeritud režiimis.
Praeguse juhtfunktsiooni lisamine
Ülaltoodud vooluahela hoolikas uurimine näitab, et kuna mosfet üritab kompenseerida paneeli langevat pingetaset, võimaldab see akul paneelilt rohkem voolu tõmmata, mis mõjutab paneeli pinget, langedes selle veelgi alla, põhjustades äravoolu olukorda. optimeerimisprotsessi tõsiselt takistada
Järgmisel diagrammil näidatud praegune juhtimisfunktsioon hoolitseb selle probleemi eest ja keelab akul liigse voolu ammutamise üle määratud piiride. See omakorda aitab paneeli pinget mõjutada.
RX, mis on voolu piirav takisti, saab arvutada järgmise valemi abil:
RX = 0,6 / I, kus I on ühendatud aku minimaalne laadimisvool

Eespool selgitatud disaini toore, kuid lihtsama versiooni võib ehitada vastavalt hr Dhyaksa soovitusele, kasutades IC555 pin2 ja pin6 läve tuvastamist, kogu skeemi võib näha allpool:

Ilma Buck Converterita pole optimeerimist
Eespool selgitatud disain töötab PWM-i põhikontseptsiooni abil, mis reguleerib 555-põhise vooluahela PWM-i automaatselt vastuseks muutuvale päikese intensiivsusele.
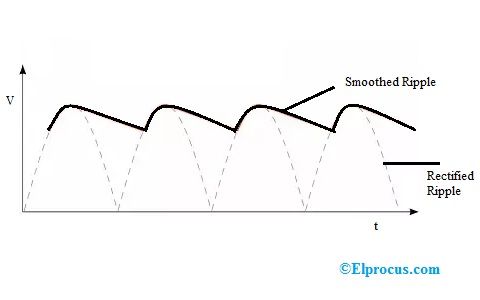
Kuigi selle vooluahela väljund tekitab isereguleeruva reaktsiooni, et säilitada püsiv keskmine pinge väljundis, ei reguleerita tipppinget kunagi, mis muudab selle liitiumioon- või Lipo-tüüpi akude laadimiseks märkimisväärselt ohtlikuks.
Veelgi enam, ülaltoodud vooluahel pole varustatud paneeli üleliigse pinge muundamiseks proportsionaalselt vooluks ühendatud madalama pinge nimikoormuse jaoks.
Buck Converteri lisamine
Püüdsin seda olukorda parandada, lisades ülaltoodud kujundusele buck converter-etapi ja sain toota optimeerimise, mis nägi välja väga sarnane MPPT-ahelaga.
Kuid isegi selle täiustatud vooluahela korral ei suutnud ma täielikult veenduda, kas vooluahel on tõepoolest võimeline tekitama püsivat pinget koos kärbitud tipptaseme ja suurendatud vooluga vastusena erinevatele päikese intensiivsuse tasemetele.
Selleks, et olla kontseptsioonis täiesti kindel ja kõrvaldada kõik segadused, pidin läbima põhjaliku uuringu, mis käsitles buck-muundureid ja sisend / väljundpinge, voolu ja PWM-suhtarvu (töötsükkel) seost, mis inspireeris luua järgmised seotud artiklid:
Kuidas Bucki muundurid töötavad
Bucki induktori pinge ja voolu arvutamine
Kahest ülaltoodud artiklist saadud kokkuvõtlikud valemid aitasid kõik kahtlused selgeks teha ja lõpuks võisin olla täiesti kindel oma varem pakutud päikese optimeerija vooluringi abil, kasutades buck muunduri vooluahelat.
PWM-i töötsükli seisundi analüüsimine disaini jaoks
Põhivalem, mis tegi asjad selgelt selgeks, on nähtav allpool:
Vout = DVin
Siin on V (in) paneelilt tulev sisendpinge, Vout on soovitud väljundpinge buck muundurist ja D on töötsükkel.
Võrrandist selgub, et Vouti saab lihtsalt kohandada, kontrollides kas kas muunduri või Vin töötsüklit või teisisõnu, Vin ja töötsükli parameetrid on otseselt proportsionaalsed ja mõjutavad üksteist väärtused lineaarselt.
Tegelikult on need terminid äärmiselt lineaarsed, mis muudab päikese optimeerija vooluahela mõõtmise buck-muunduri ahela abil palju lihtsamaks.
See tähendab, et kui Vin on koormuse spetsifikatsioonidest palju kõrgem (@ päikesepaiste), võib IC 555 protsessor muuta PWM-id proportsionaalselt kitsamaks (või P-seadme jaoks laiemaks) ja mõjutada Vouti püsimist soovitud tasemel ja vastupidi kui päike väheneb, saab protsessor PWM-i uuesti laiendada (või kitsendada P-seadme jaoks), et tagada väljundpinge püsimine kindlaksmääratud konstantsel tasemel.
PWM-i rakendamise hindamine praktilise näite abil
Eeltoodut saame tõendada antud valemi lahendamisega:
Oletame, et paneeli tipppinge V (in) on 24V
ja PWM peab koosnema 0,5 sekundi jooksul sisse lülitatud ajast ja 0,5 sekundi väljalülitusajast
Töötsükkel = transistori sisselülitusaeg / impulss ON + OFF aeg = T (sees) / 0,5 + 0,5 sek
Töötsükkel = T (sees) / 1
Seetõttu asendame ülaltoodud allpool toodud valemis,
V (väljas) = V (sees) x T (sees)
14 = 24 x T (sees)
kus 14 on eeldatav vajalik väljundpinge,
seetõttu
T (sees) = 14/24 = 0,58 sekundit
See annab meile transistori sisselülitusaja, mis tuleb päikesekiirte ajal seada vooluahelale vajaliku 14v väljundi tekitamiseks.
Kuidas see töötab
Kui ülaltoodu on seatud, võib ülejäänud osa jätta IC 555-le töötlemiseks oodatava isereguleeruva T (sisse) perioodi jaoks vastusena vähenevale päikesepaistele.
Nüüd, kui päikesepaiste väheneb, pikendab ülaltoodud sisselülitamise aeg (või väheneb P-seadme puhul) vooluahela abil proportsionaalselt lineaarselt, et tagada püsiv 14 V, kuni paneeli pinge langeb tõesti 14 V-ni, kui vooluahel võiks lihtsalt protseduurid kinni panna.
Praegune (amp) parameeter võib olla ka isereguleeruv, mis püüab kogu optimeerimisprotsessi vältel alati saavutada (VxI) toote konstandi. Seda seetõttu, et buck-muundur peaks alati muundama kõrgepinge sisendi väljundis proportsionaalselt suurenenud voolutugevuseks.
Siiski, kui olete huvitatud tulemuste täielikust kinnitamisest, võite asjakohaste valemite kohta lugeda järgmist artiklit:
Bucki induktori pinge ja voolu arvutamine
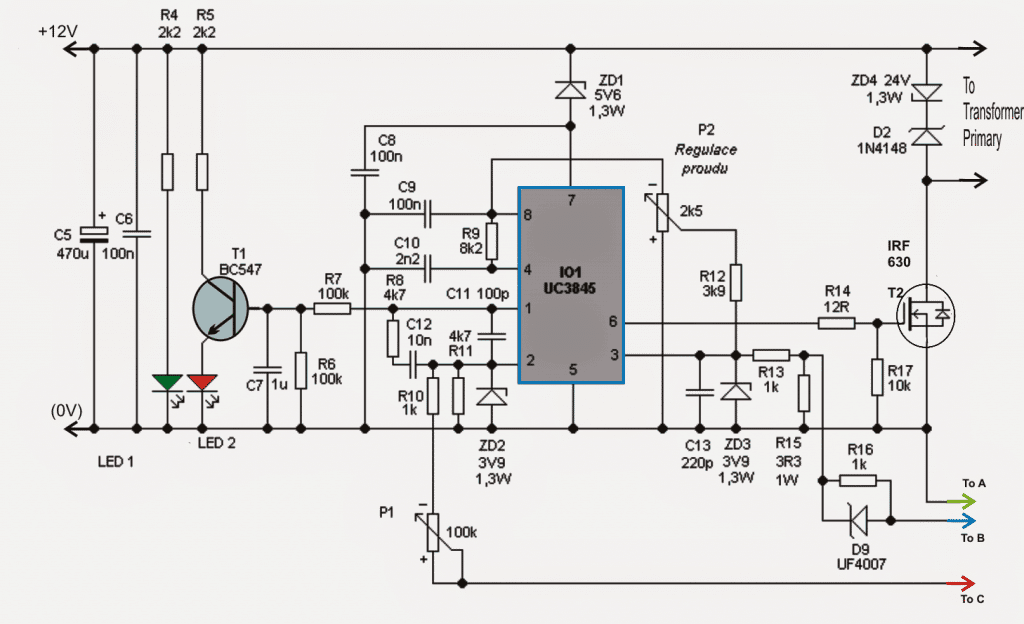
Vaatame nüüd, kuidas minu kujundatud viimane vooluring välja näeb, järgmisest teabest:

Nagu näete ülaltoodud diagrammilt, on põhiskeem identne varasema iseenesest optimeeriva päikeselaadija ahelaga, välja arvatud IC4, mis on konfigureeritud pinge järgijana ja asendatakse emitteri BC547 järgija staadiumi asemel. Seda tehakse selleks, et saada parem vastus paneelilt IC2 tihvti nr 5 juhtnupule.
Päikese optimeerija põhifunktsioonide kokkuvõte
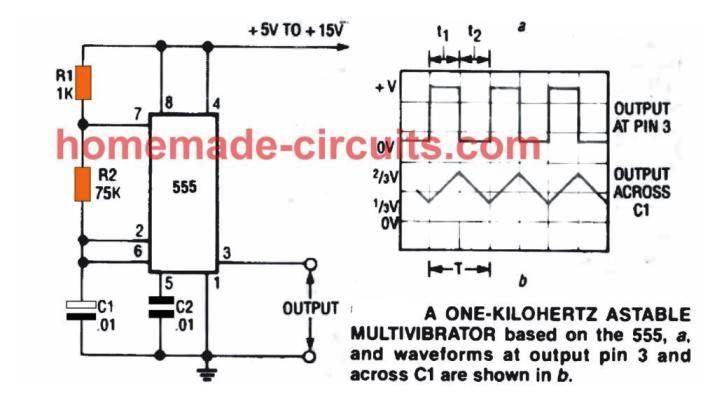
Toimimist võib muuta vastavalt allpool toodud kirjeldusele: IC1 tekitab umbes 10kHz ruutlaine sageduse, mida saaks suurendada C1 väärtuse muutmisega 20kHz-ni.
See sagedus suunatakse IC2 pin2-le, et valmistada T1 / C3 abil kiirelt vahetuvaid kolmnurga laineid tihvtis nr 7.
Paneeli pinget reguleeritakse sobivalt P2 abil ja juhitakse IC4 pinge järgija tasemele, et toita IC2 tihvti # 5.
Seda potentsiaali paneeli IC2 tihvti nr 5 juures võrreldakse tihvti nr 7 kiirete kolmnurga lainetega, et luua vastavate mõõtmetega PWM-andmed IC2 tihvti nr 3 juures.
Päikesepaiste tipul on P2 sobivalt reguleeritud nii, et IC2 tekitab võimalikult laia PWM-i ja kui päikese paistmine hakkab vähenema, muutub PWM proportsionaalselt kitsamaks.
Ülaltoodud efekt suunatakse PNP BJT alusele vastuse inverteerimiseks kogu lisatud muunduri astmesse.
Siit järeldub, et päikesepaiste ajal sunnivad laiemad PWM-id PNP-seadet vähe {vähendatud T (sisse lülitatud) ajaperioodi juhtima, põhjustades kitsamate lainekujude jõudmist buck-induktiivpoolini ... kuid kuna paneeli pinge on kõrge, sisendpinge tase {V (in)} jõuab induktiivpooli võrdub paneeli pinge tasemega.
Seega suudab antud olukorras korrektselt arvutatud T (sisse) ja V (sisse) abil muundur toota koormuse jaoks vajaliku väljundpinge, mis võib olla paneeli pingest palju madalam, kuid proportsionaalselt suurendatud voolu (amp) tase.
Nüüd, kui päike paistab, langevad ka PWM-id kitsamaks, võimaldades PNP T (sees) suureneda proportsionaalselt, mis omakorda aitab buck-induktoril kompenseerida vähenevat päikest, suurendades väljundpinget proportsionaalselt ... vool (amp ) tegurit vähendatakse nüüd tegevuse käigus proportsionaalselt, tagades, et väljundi järjepidevus oleks buck-muunduri abil täielikult hoitud.
T2 koos seotud komponentidega moodustavad voolu piirava astme või veavõimendi astme. See tagab, et väljundkoormusel ei tohi kunagi kuluda midagi, mis ületab disaini hinnatud spetsifikatsioone, nii et süsteem ei kärise kunagi ja päikesepaneeli jõudlusel ei lubata kunagi oma kõrge kasuteguriga tsoonist kõrvale kalduda.
C5 on näidatud kui 100uF kondensaator, kuid parema tulemuse saavutamiseks võib see tõusta väärtuseni 2200uF, kuna suuremad väärtused tagavad parema pulsatsioonivoolu juhtimise ja sujuvama koormuse pinge.
P1 on mõeldud Opamp-väljundi nihkepinge reguleerimiseks / korrigeerimiseks nii, et tihvt nr 5 suudab päikesepaneeli pinge puudumisel või kui päikesepaneeli pinge on alla koormuspinge spetsifikatsioonide, vastu võtta täiusliku nulli volti.
L1 spetsifikatsiooni võib ligikaudselt kindlaks määrata järgmises artiklis toodud teabe abil:
Kuidas arvutada induktoreid SMPS-ahelates
Päikese optimeerija, kasutades op-amprit
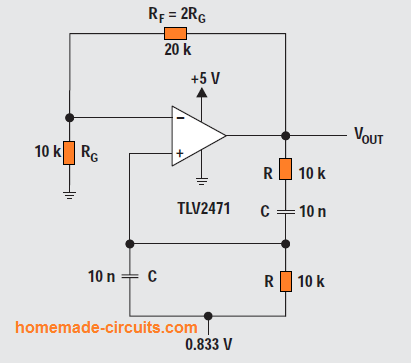
Veel ühe väga lihtsa, kuid tõhusa päikese optimeerija vooluringi saab teha, kasutades LM338 IC-d ja mõnda opampi.
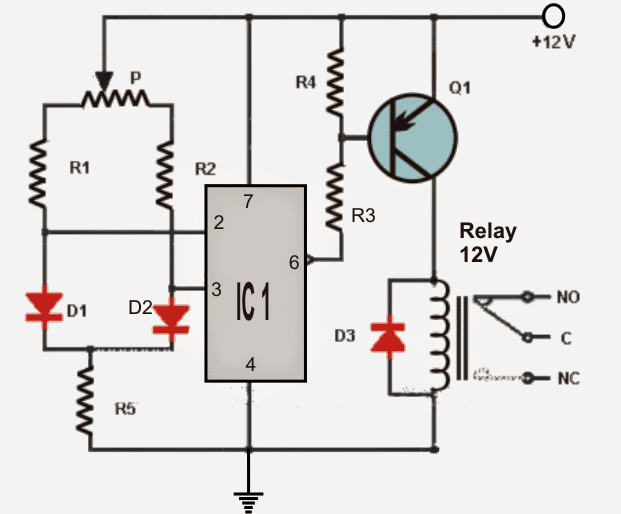
Mõistame kavandatud vooluahelat (päikese optimeerijat) järgmiste punktide abil: Joonisel on kujutatud LM338 pinge regulaatori ahel, millel on voolu juhtimisfunktsioon ka transistori BC547 kujul, mis on ühendatud IC reguleerimis- ja maandustihvtiga.
Võrdlusena kasutatavad opampid
Kaks opampi on konfigureeritud võrdlusteks. Mõjude suurendamiseks võib tegelikult lisada palju selliseid etappe.
Käesolevas konstruktsioonis on A1 tihvti nr 3 eelseadistatud nii, et A1 väljund suureneb, kui päikese paistmise intensiivsus paneeli kohal on umbes 20% väiksem kui tippväärtus.
Samamoodi reguleeritakse A2 aste nii, et selle väljund suureneb, kui päikesepaiste on tippväärtusest umbes 50% väiksem.
Kui A1 väljund tõuseb kõrgele, käivitab RL # 1 R2 ühendamise vooluahelaga, ühendades R1 lahti.
Esialgu päikesepaiste tipphetkel võimaldab R1, mille väärtus on valitud palju madalam, maksimaalse voolu akuni jõudmiseks.
Vooluringi skeem

Kui päikesepaiste langeb, langeb ka paneeli pinge ja nüüd ei saa me endale lubada paneelilt tugevat voolu, sest see viiks pinge alla 12 V, mis võib laadimisprotsessi täielikult peatada.
Relee vahetamine praeguse optimeerimise jaoks
Seega, nagu eespool selgitatud, töötab A1 ja ühendab R1 lahti ja ühendab R2. R2 valitakse suurema väärtusega ja see lubab akule ainult piiratud koguses voolu, nii et päikesepinge ei kukuks alla 15 volti, mis on tingimata vajalik LM338 sisendis.
Kui päikesepaiste langeb alla teise seatud künnise, aktiveerib A2 RL # 2, mis omakorda lülitab R3, et muuta aku vool veelgi madalamaks, tagades, et LM338 sisendis olev pinge ei langeks kunagi alla 15 V, kuid laadimissagedus on akut hoitakse alati optimaalseima tasemeni.
Kui opamp-astmeid suurendatakse suurema arvu releede ja järgnevate praeguste juhtimistoimingutega, saab seadet veelgi efektiivsemalt optimeerida.
Ülaltoodud protseduur laeb akut kiirel päikesepaistel suure voolu korral ja vähendab voolutugevust, kui päikese intensiivsus paneeli kohal langeb, ja varustab akut vastavalt õige nimivooluga, nii et see saab päeva lõpuks täielikult täis.
Mis juhtub akuga, mida ei pruugi tühjaks laadida?
Oletame, et kui aku ei ole järgmisel hommikul ülalnimetatud protsessi läbimiseks optimaalselt tühi, võib olukord akule saatuslikuks saada, kuna esialgsel suurel voolul võib olla negatiivne mõju akule, kuna see pole veel määratud hinnangud.
Ülaltoodud probleemi kontrollimiseks tutvustatakse veel paari opampi, A3, A4, mis jälgivad aku pingetaset ja käivitavad samad toimingud, mida teevad A1, A2, nii et aku vool oleks optimaalne selle aja jooksul aku pinge või laetuse tase.
Paari: Munitsipaalveevarustuse anduri kontrolleri vooluahel Järgmine: toite sisselülitamise alarm koos automaatse väljalülitusahelaga