Esitatav kolmefaasiline VFD-ahel ( minu kujundatud ) saab kasutada mis tahes kolmefaasilise harjatud vahelduvvoolumootori või isegi harjadeta vahelduvvoolumootori kiiruse reguleerimiseks. Idee soovis hr Tom
VFD kasutamine
Kavandatavat kolmefaasilist VFD-ahelat saab universaalselt rakendada enamiku kolmefaasiliste vahelduvvoolumootorite jaoks, kus reguleerimise efektiivsus pole liiga kriitiline.
Seda saab spetsiaalselt kasutada kontrollimiseks orava puuri induktsioonmootori kiirus avatud tsükli režiimis ja võib-olla ka suletud ahela režiimis, mida arutatakse artikli hilisemas osas.
Kolmefaasilise muunduri jaoks vajalikud moodulid
Kavandatava kolmefaasilise VFD või muutuva sagedusega ajami vooluahela kavandamiseks on põhimõtteliselt vajalikud järgmised põhilised vooluahela etapid:
- PWM pinge regulaatori ahel
- 3-faasiline kõrge külg / madal külg H-silla juhtimisahel
- 3 Faasigeneraatori ahel
- Pinge sagedusmuunduri ahel V / Hz parameetri genereerimiseks.
Õppime ülaltoodud etappide toimimise üksikasju järgmise selgituse abil:
Lihtsat PWM-pinge regulaatori vooluahelat võib näha allpool toodud skeemil:

PWM-i kontroller
Olen juba integreerinud ja selgitanud ülaltoodud PWM-i generaatori etapi toimimist, mis on põhimõtteliselt mõeldud erineva PWM-väljundi genereerimiseks IC2 pin3 kaudu vastuseks potentsiaalile, mida rakendatakse sama IC pin5-l.
Diagrammil kujutatud 1K eelseadistus on RMS juhtnupp, mida saab sobivalt reguleerida soovitud proportsionaalse väljundpinge saamiseks PWM-de kujul IC2 pin3 juures edasiseks töötlemiseks. See on seatud tootma vastavat väljundit, mis võib olla samaväärne võrgu 220 V või 120 V vahelduvvoolu RMS-ga.
H-silla juhi vooluring
Järgmine järgmine diagramm näitab ühe kiibiga H-silla 3-faasilist draiveri vooluringi IC IRS2330 abil.
Kujundus näeb välja otsekohene, kuna suurema osa keerukusega lahendavad kiibid sisseehitatud keerukad vooluringid.
Hästi arvutatud kolmefaasiline signaal rakendatakse IC-i sisenditel HIN1 / 2/3 ja LIN1 / 2/3 läbi kolmefaasilise signaaligeneraatori astme.
Programmi väljundid IC IRS2330 võib näha integreerituna 6 mosfeti või IGBT-sildvõrguga, mille äravoolukanalid on juhtimisega vajaliku mootoriga sobivalt konfigureeritud.
Madalad mosfeti- / IGBT-väravad on integreeritud ülalkirjeldatud PWM-generaatori vooluahela etapi IC2 tihvtiga nr 3, et algatada PWM-i süstimine silla mosfeti staadiumisse. See regulatsioon aitab mootoril lõpuks saada soovitud kiiruse vastavalt seadistustele (esimeses skeemis 1 k eelseadistuse kaudu).

Järgmisel diagrammil visualiseerime vajaliku kolmefaasilise signaaligeneraatori vooluahela.

Kolmefaasilise generaatori vooluahela konfigureerimine
Kolmefaasiline generaator on konstrueeritud paari CMOS-kiibi CD4035 ja CD4009 ümber, mis genereerib täpselt mõõdetavad kolmefaasilised signaalid kogu näidatud pinoutides.
Kolmefaasiliste signaalide sagedus sõltub sisestatud kelladest, mis peaksid olema kavandatud kolmefaasilise signaali kuus korda suuremad. See tähendab, et kui vajalik 3-faasiline sagedus on 50 Hz, peaks sisendkell olema 50 x 6 = 300 Hz.
See tähendab ka seda, et ülaltoodud kellasid võiks varieerida juhi IC tegeliku sageduse muutmiseks, mis omakorda vastutaks mootori töösageduse muutmise eest.
Kuid kuna ülaltoodud sageduse muutmine peab muutuva pinge korral olema automaatne, muutub pinge-sagedusmuundur hädavajalikuks. Järgmine etapp käsitleb lihtsat täpset pinge ja sagedusmuunduri ahelat vajaliku rakenduse jaoks.
Kuidas luua püsiv V / F suhe
Tavaliselt asünkroonmootorites tuleb mootori kiiruse ja pöördemomendi optimaalse efektiivsuse säilitamiseks kontrollida libisemiskiirust või rootori pöörlemiskiirust, mis omakorda on võimalik püsiva V / Hz suhte säilitamise abil. Kuna staatori magnetvoo väärtus on alati konstantne, sõltumata sisendtoite sagedusest, muutub rootori kiirus kergesti reguleeritavaks hoides V / Hz suhet konstantsena .
Avatud ahela režiimis saab seda teha umbes, säilitades eelnevalt kindlaksmääratud V / Hz suhted ja rakendades seda käsitsi. Näiteks esimeses skeemis saab seda teha R1 ja 1K eelseadistuse sobivaks reguleerimisega. R1 määrab sageduse ja 1K reguleerib väljundi RMS-i, seetõttu saab kahte parameetrit sobivalt reguleerides manustada vajaliku summa V / Hz.
Kuid asünkroonmootori pöördemomendi ja pöörlemiskiiruse suhteliselt täpse kontrolli saavutamiseks peame rakendama suletud ahela strateegiat, kus libisemiskiiruse andmed tuleb sisestada töötlusahelasse V / Hz suhte automaatseks reguleerimiseks, nii et see väärtus jääb alati umbes konstantseks.
Suletud ahelaga tagasiside rakendamine
Selle lehe esimest skeemi saab sobivalt muuta suletud ahela automaatse V / Hz reguleerimise kujundamiseks, nagu allpool näidatud:

Ülaltoodud joonisel määrab IC2 tihvti nr 5 potentsiaal SPWM-i laiuse, mis genereeritakse sama IC tihvti nr 3 juures. SPWM genereeritakse võrgu 12 V pulsatsiooniproovi võrdlemisel tihvti nr 5 ja kolmnurga lainega IC2 tihvti nr 7 juures ning see suunatakse mootori juhtimiseks madalatele külgmistele võrkudele.
Esialgu on see SPWM seatud mõnele reguleeritud tasemele (kasutades 1K persetti), mis käivitab kolmefaasilise silla madalamad külgmised IGBT-väravad rootori liikumise alustamiseks määratud nimikiiruse tasemel.
Niipea, kui rootori rootor hakkab pöörlema, põhjustab kinnitatud tahhomeeter koos rootori mehhanismiga proportsionaalse täiendava pinge tekkimise IC2 tihvti nr 5 juures, see põhjustab proportsionaalselt SPWM-ide laienemise, põhjustades mootori staatori mähistele rohkem pinget. See põhjustab rootori pöörlemiskiiruse edasist suurenemist, põhjustades rohkem pinget IC2 tihvti nr 5 juures ja see kestab seni, kuni SPWM-i ekvivalentne pinge ei ole enam võimeline suurenema ja staatori rootori sünkroniseerimine saavutab püsiseisundi.
Ülaltoodud protseduur jätkub isereguleerumiseks kogu mootori tööperioodi vältel.
Kuidas teha tahhomeetrit ja integreerida seda
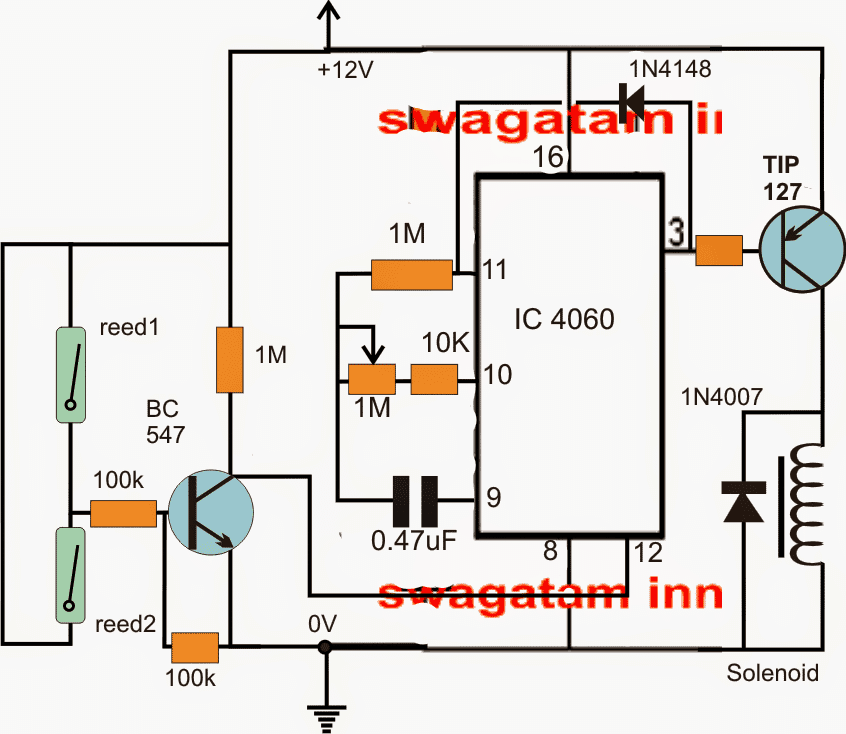
Järgmisel diagrammil on näha lihtne tahhomeetri konstruktsioon, selle võiks integreerida rootori mehhanismiga, nii et pöörlemissagedus suudaks toita BC547 alust.

Siin kogutakse rootori kiiruse andmed halli efekti andurilt või IR LED / Sensori võrgult ja suunatakse T1 baasi.
T1 võnkub sellel sagedusel ja aktiveerib tahhomeetri vooluahela, seadistades IC 555 monostabiilse vooluahela asjakohase konfigureerimise.
Ülaltoodud tahhomeetri väljund varieerub proportsionaalselt vastavalt sisendsagedusele T1 alusel.
Kui sagedus tõuseb, siis paremal äärmisel küljel tõuseb ka D3 väljund ja vastupidi ning aitab hoida V / Hz suhet suhteliselt konstantsel tasemel.
Kuidas kontrollida kiirust
Mootori kiirust konstantse V / F abil saab muuta, muutes sageduse sisendit IC 4035 kella sisendis. Seda saab saavutada muutuva sageduse toomisega IC 555 astable-ahelast või mis tahes standardsest astable-vooluringist kella sisendile IC 4035.
Sageduse muutmine muudab tõhusalt mootori töösagedust, mis alandab vastavalt libisemiskiirust.
Selle tuvastab tahhomeeter ja tahhomeeter vähendab proportsionaalselt potentsiaali IC2 tihvti nr 5 juures, mis omakorda vähendab proportsionaalselt mootori SPWM-sisaldust ja sellest tulenevalt väheneb mootori pinge, tagades mootori pöörlemiskiiruse õige muutumise vajalik V / F suhe.
Omatehtud V-F muundur

Ülaltoodud pinge-sagedusmuunduri vooluringis kasutatakse IC 4060 ja selle sagedusest sõltuvat takistust mõjutatakse LED / LDR-sõlme kaudu kavandatud muundamiseks.
LED / LDR komplekt on suletud valguskindla kasti sisse ja LDR on paigutatud üle IC 1M sagedusest sõltuva takisti.
Kuna LDR / LDR vastus on üsna lineaarne, tekitab LDR-i erineva LED-i valgustus proportsionaalselt erineva (suureneva või väheneva) sageduse IC pin3-s.
Astme FSD või V / Hz vahemiku saab seadistada 1M takisti või isegi C1 väärtuse asjakohase seadistamise abil.
LED on pinge tuletatud ja valgustatud PWM-ide kaudu esimesest PWM-ahela etapist. See tähendab, et kuna PWM-id varieeruvad, varieerub ka LED-valgustus, mis omakorda põhjustaks ülaltoodud diagrammil IC 4060 pin3-l proportsionaalselt suureneva või väheneva sageduse.
Muunduri integreerimine VFD-ga
See IC 4060-st erinev sagedus tuleb nüüd lihtsalt integreerida kolmefaasilise generaatori IC CD4035 kella sisendiga.
Ülaltoodud etapid moodustavad kolmefaasilise VFD-ahela valmistamise peamised koostisosad.
Nüüd on oluline arutada IGBT mootorikontrollerite tarnimiseks vajaliku alalisvooluühenduse ja kogu disaini protseduuride seadistamise üle.
IGBT H-silla rööbastele rakendatava alalisvooluühenduse võib saada olemasoleva kolmefaasilise võrgusisendi parandamise abil järgmise vooluahela konfiguratsiooni abil. IGBT DC BUS rööpad on ühendatud punktidega, mis on tähistatud koormaga

Ühefaasilise allika korral võib paranduse teostada standardse 4-dioodilise sildvõrgu konfiguratsiooniga.
Kavandatud kolmefaasilise VFD-ahela seadistamine
Seda võib teha järgmiste juhiste järgi:
Pärast alalisvoolu siinipinge rakendamist IGBT-desse (ilma ühendatud mootorita) reguleerige PWM 1k eelseadistust, kuni rööbaste ületav pinge võrdub mootori kavandatud pinge näitajatega.
Järgmisena reguleerige eelseadistust IC 4060 1M, et reguleerida mis tahes IC IRS2330 sisendit nõutava õige sagedustasemega vastavalt antud mootori spetsifikatsioonidele.
Kui ülaltoodud protseduurid on lõpule viidud, võib nimetatud mootori ühendada ja toita erineva pingetasemega, parameetriga V / Hz ning kinnitada, et ühendatud mootor töötab automaatselt V / Hz.
Eelmine: Kuidas ehitada kasvavat valgusahelat Järgmine: veepehmendaja vooluring




![4 lihtsat klapilüliti ahelat [testitud]](https://electronics.jf-parede.pt/img/4017-ic-circuits/21/4-simple-clap-switch-circuits.png)