Kaasaegses maailmas robot mängib olulist rolli . Roboti peamine eesmärk on vähendada inimese võimsust. Roboteid kasutatakse elektroonikas paljudes rakendustes. Selles artiklis oleme arutanud, kuidas ehitada robot Arduino mooduli ja 8051 mikrokontrolleriga. Arduinoga roboti ehitamiseks selgitame arduino roboti kohta takistuste vältimist. Nõutavad komponendid hõlmavad robotkere, alalisvoolumootorit, ultraheliandurit, Arduino moodulit, mootori draiveri IC-d ja Arduino moodulit
Kuidas ehitada robotit?
The vajalikud komponendid roboti ehitamine sisaldab järgmist
Roboti kere
Roboti põhikorpus takistuste vältimise robot on näidatud järgmisel pildil. Roboti korpus on plastkere ja see sisaldab mõlemalt poolt rattaid. Roboti kere ette on paigutatud ultraheliandur. Ultraheli anduri abil saab takistus tuvastada. Kui ultraheliandur tuvastab roboti liikumise ajal takistusi, liigub robot kõrvale ja ta jätkab liikumist.

Roboti kere
Alalisvoolumootor
The Alalisvoolumootor on elektrimootor ja see töötab alalisvoolu elektril. Iga elektrimootori töö põhineb elektromagnetismil. Magnetvälja tekitab voolu kandev juht, kui see asetatakse välisele magnetväljale, kogeb see juhi vooluga proportsionaalset jõudu. Üldiselt teame, et magnetid on polaarselt ligitõmbavad põhjast lõunasse ja kui polaarsused on samad nagu põhjast põhja ja lõunast lõunasse, siis magnetid tõrjuvad.

Alalisvoolumootor
Alalisvoolumootori sisemine konfiguratsioon on loodud selleks, et kinnitada voolu kandva juhi ja välise magnetvälja vahelist magnetilist vastastikmõju liikumise tekitamiseks. Selles kasutame kahte alalisvoolumootorit, iga mootor sisaldab 6v ja kaks alalisvoolumootorit kokku 12v. Kaks alalisvoolumootorit on paigutatud roboti korpusesse, mida saame jälgida järgmisel pildil. Robotkere liigutatakse alalisvoolumootorite abil

Alalisvoolumootoriga robotkere
Arduino moodul
Järgmine pilt näitab arduino mooduli pilti. The arduino moodul mängib olulist rolli takistuste vältimise roboti kujundamisel, kasutades arduino komplekti. Arduino vastuvõtja tihvt on ühendatud ultrahelianduri teise tihvtiga ja arduino mooduli 1., 2. ja 3. tihvt on ühendatud alalisvoolumootori draiveriga. Arduino mooduliga on aku toiteallika abil ühendatud ka tavalised komponendid - kondensaator ja diood.

Arduino moodul
Mootori juhi IC
Alalisvoolumootori käitamiseks mootori juhi IC kasutatud. Mootorijuhi tihvtid 3,6 ja 11, 14 on ühendatud alalisvoolumootoriga. Sisendnõelad 1 ja 2 on ühendatud arduino mooduliga ja lubamisnõel on ühendatud arduino saatja tihvtiga. Mootorijuhi tihvtid 4, 5, 12, 13 on ühendatud maapinnaga.

Mootori juhi IC
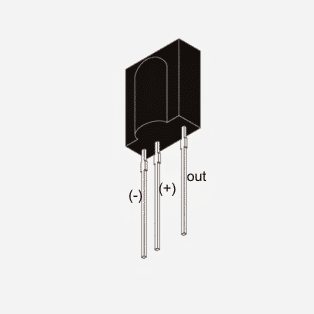
Ultraheliandur
Selles kontseptsioonis ultraheliandur kasutatakse ees oleva takistuse tuvastamiseks ja see saadab käsu arduino pardal. Sõltuvalt sisendsignaalist suunab mikrokontroller roboti liikuma vaheldumisi.

Ultraheliandur
Arduino roboti takistuste vältimise rakendused
- Arduino robot saab liikuda mis tahes pinnal
- See võib liikuda metallilisel pinnal nagu külmkapi korpus.
Alloleval pildil on arduino robot takistuste vältimiseks

Arduino robot takistuste vältimiseks
Roboti ehitamiseks koos mikrokontroller 8051 selgitame metallidetektoriga robotsõiduki kohta. 8051 mikrokontrolleriga roboti ehitamiseks vajalikud komponendid on
- 8051 mikrokontroller
- Alalisvoolumootorid
- Mootorijuhid
- Metallidetektor
- Dekooder
- Kodeerija
- Nupud
- Kristall
- RF-saatja ja -vastuvõtja
Metallidetektor
The metallidetektor on mähis, millel on üks või mitu metallpiraali, mida kasutatakse metallide tuvastamiseks maapinnal. Metallidetektor töötab elektromagnetilise induktsiooni põhimõttel. Metallidetektor on roboti korpusega ühendatud PCB kaudu, mida võime jälgida viimasel pildil. Järgmine pilt näitab elektroonilistes projektides kasutatavat metallidetektorit.

Metallidetektor
Nupud
Nupud on nupud, mis koosnevad kõvast metallist, nagu plast ja metall. Üldiselt kasutatakse mikrokontrolleris programmi lähtestamiseks nuppe. Järgmine pilt näitab nupu pilti.

Vajutage nuppu
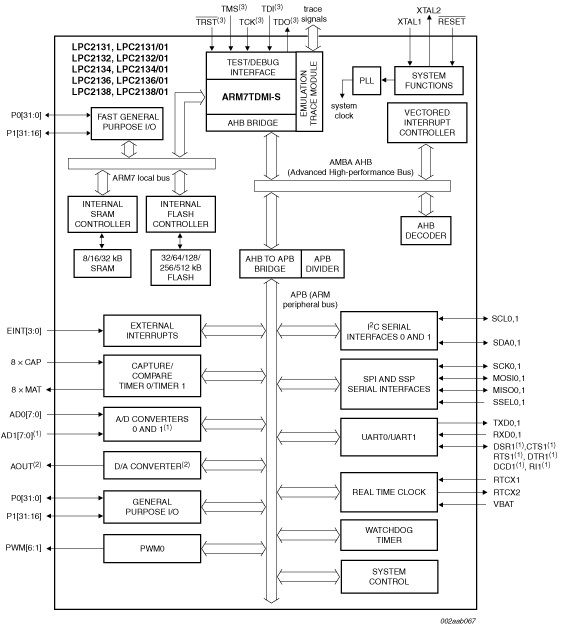
8051 mikrokontroller
The 8051 mikrokontroller koosneb 40 tihvtist . Mikrokontrolleri 4. ja 5. tihvt on ühendatud kristalli ostsillaatoriga. Vcc-tihvt antakse 5 V toiteallikale ja maandustihvt on ühendatud maapinnaga. Mikrokontrolleri tihvtid 15, 16, 18, 19 on ühendatud HT12E kodeerija IC-ga. Mikrokontrolleri tihvtid 2, 7, 8, 9 on ühendatud surunuppudega.
Järgmine pilt on pärast kõigi komponentide, nagu takisti, kondensaatori, kristalli ostsillaatori, seeria 8051 mikrokontrolleri, koodrite ja muu ühendamist ühendatud trükkplaat .

PCB ühendused
Alloleval pildil on metalliotsija robot koos seeria 8051 mikrokontrolleriga.

Metalliotsija robot 8051. seeria mikrokontrolleriga
Selles artiklis oleme arutanud Kuidas arduino ja 8051 mikrokontrolleriga robotit ehitada . Loodan, et lugedes seda artiklit, olete omandanud mõned põhiteadmised roboti ehitamiseks. Kui teil on küsimusi selle artikli või elektroonika ja kommunikatsiooniprojektid , palun kommenteerige allpool jaotises. Siin on teile küsimus, Mis on 8051. seeria mikrokontroller?
.