
Definitsioon
Harjadeta alalisvoolumootor koosneb rootorist püsimagnetina ja staatorist mitmefaasiliste armatuurimähiste kujul. See erineb tavalisest alalisvoolumootorist selle poolest, et see ei sisalda harju ja kommuteerimine toimub elektriliselt, kasutades staatori mähiste toitmiseks elektroonilist ajamit.
Põhimõtteliselt saab BLDC mootorit valmistada kahel viisil - asetades rootori südamikust väljapoole ja mähised südamikku ning teise asetades mähised südamikust väljapoole. Eelmises paigutuses toimivad rootormagnetid isolaatorina ja vähendavad mootorist eralduva soojuse kiirust ning töötavad väikese voolu korral. Tavaliselt kasutatakse seda ventilaatorites. Viimases paigutuses hajutab mootor rohkem soojust, põhjustades seega selle pöördemomendi suurenemist. Seda kasutatakse kõvakettaseadmetes.

BLDC
4 Pole 2-faasilise mootori töö
Harjadeta alalisvoolumootorit ajab elektrooniline ajam, mis lülitab rootori pöörlemisel toitepinge staatori mähiste vahel. Rootori asukohta jälgib andur (optiline või magnetiline), mis edastab teavet elektroonilisele kontrollerile, ja selle asukoha põhjal määratakse pingestatud staatori mähis. See elektrooniline ajam koosneb transistoridest (2 iga faasi kohta), mida juhitakse mikroprotsessori kaudu.

BLDC-DC
Püsimagnetite tekitatud magnetväli interakteerub staatori mähistes voolu indutseeritud väljaga, tekitades mehaanilise pöördemomendi. Elektrooniline lülitusahel või ajam lülitab staatori toitevoolu sisse, et hoida vastastikmõjus olevate väljade vahel ühtlast nurka 0–90 kraadi. Halli andurid on enamasti paigaldatud staatorile või rootorile. Kui rootor läbib saali anduri, tuginedes põhja- või lõunapoolusele, tekitab see kõrge või madala signaali. Nende signaalide kombinatsiooni põhjal määratletakse pingestatav mähis. Mootori töös hoidmiseks peaks mähiste tekitatud magnetväli nihkuma asendisse, kui rootor liigub staatori väljale järele jõudmiseks.

Vooluring
4-pooluselises, kahefaasilises harjadeta alalisvoolumootoris kasutatakse staatori külge kinnitatud ühe saali andurit. Rootori pöörlemisel tajub saali andur asendit ja arendab signaali kõrge või madal, sõltuvalt magneti poolusest (põhi või lõuna). Halli andur on takisti kaudu ühendatud transistoridega. Kui anduri väljundis tekib kõrgepinge signaal, hakkab spiraaliga A ühendatud transistor juhtima, pakkudes voolu liikumise teed ja seeläbi pingutades mähist A. Kondensaator hakkab laadima kogu toitepingeni. Kui saali andur tuvastab rootori polaarsuse muutuse, arendab see väljundis madalpinge signaali ja kuna transistor 1 ei saa toiteallikat, on see katkestusseisundis. Kondensaatori ümber arenenud pinge on Vcc, mis on toitepinge 2-lendtransistor ja mähis B on nüüd pingestatud, kui vool seda läbib.
BLDC mootoritel on fikseeritud püsimagnetid, mis pöörlevad ja fikseeritud armatuur, kõrvaldades probleemid voolu ühendamisel liikuva armatuuriga. Ja võib-olla rohkem rootori pooluseid kui staatori või vastumeelsuse mootorid. Viimased võivad olla ilma püsimagnetideta, vaid rootorile indutseeritud postid, mis seejärel ajastatud staatori mähiste abil kokku tõmmatakse. Harjatud alalisvoolumootori harja / kommutaatori komplekti asendab elektrooniline kontroller, mis lülitab faasi pidevalt mähistele, et mootor pöörleks. Kontroller teostab võrdlevat ajastatud võimsuse jaotust, kasutades harja / kommutaatorisüsteemi asemel tahkisahelat.

BLDC mootor
7 harjadeta alalisvoolumootorite eeliseid
- Parem kiirus versus pöördemomendi omadused
- Kõrge dünaamiline reaktsioon
- Kõrge efektiivsusega
- Pikk tööiga elektriliste ja hõõrdekadude puudumise tõttu
- Müravaba töö
- Suuremad kiirusevahemikud
Rakendused:
Harjadeta alalisvoolumootori maksumus on alates esitlusest vähenenud materjalide ja disaini edenemise tõttu. See kulude vähenemine koos arvukate keskpunktidega, mis tal on harja-alalisvoolumootori kohal, muudab harjadeta alalisvoolumootori populaarseks komponendiks paljudes eristuvates rakendustes. BLDC mootorit kasutavad rakendused hõlmavad järgmist:
- Koduelektroonika
- Transport
- Küte ja ventilatsioon
- Tööstustehnoloogia
- Mudelite ehitus
Tööpõhimõte
BLDC mootorite töö põhimõtted on samad mis harjatud alalisvoolumootoril, s.t võlli sisemise positsiooni tagasiside. Harjatud alalisvoolumootori korral rakendatakse tagasisidet mehaanilise kommutaatori ja harjade abil. BLDC mootoris saavutatakse see mitme tagasiside anduriga. BLDC mootorites kasutame enamasti Hall-efekti andurit. Kui rootori magnetpoolused lähevad halli anduri lähedale, genereerivad nad HIGH või LOW-taseme signaali, mida saab kasutada võlli asukoha määramiseks. Kui magnetvälja suund on vastupidine, siis areneb ka pinge.
BLDC mootori juhtimine
Juhtseadet rakendab mikroelektroonika, millel on mitu kõrgtehnoloogilist valikut. Selle võib teostada mikrokontrolleri, spetsiaalse mikrokontrolleri, juhtmega mikroelektroonikaseadme, PLC või sarnase muu seadme abil.
Analoogkontroller kasutab endiselt, kuid ei saa tagasiside sõnumeid töödelda ja vastavalt juhtida. Seda tüüpi juhtimisahelate abil on võimalik rakendada suure jõudlusega juhtimisalgoritme, näiteks vektorjuhtimine, väljale orienteeritud juhtimine, kiire juhtimine, mis kõik on seotud mootori elektromagnetilise olekuga. Lisaks rakendatakse tavapäraselt ka välise silmuse juhtimist mitmesuguste dünaamikanõuete jaoks, näiteks libisevate mootorite juhtimine, adaptiivne juhtimine, ennustav juhtimine jne.
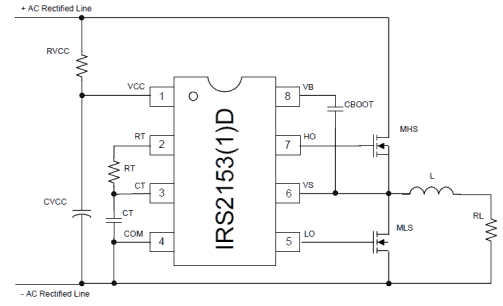
Kõigi nende kõrval leiame suure jõudlusega PIC (toite integreeritud vooluahel), ASIC (rakendusspetsiifilised integraallülitused) jne. mis võib oluliselt lihtsustada juhtimisseadise ja elektrilise elektriseadme ehitust. Näiteks täna on meil ühes IC-s täielik PWM (Pulse Width Modulation) regulaator, mis võib mõnes süsteemis asendada kogu juhtploki. Ühendatud draiveri IC pakub täielikku lahendust kõigi kuue toitelüliti juhtimisele kolmefaasilises muunduris. Sarnaseid integreeritud vooluahelaid on arvukalt, mida iga päevaga üha rohkem lisatakse. Päeva lõpuks hõlmab süsteemi montaaž tõenäoliselt ainult mõnda juhtimistarkvara, mille kogu riistvara on õige kuju ja kujuga.
PWM (Pulse Width Modulation) lainet saab kasutada mootori kiiruse reguleerimiseks. Siin antakse keskmine pinge või muutub mootorit läbiv keskmine vool sõltuvalt mootori kiirust reguleerivate impulsside sisse- ja väljalülitusajast, st laine töötsükkel kontrollib selle kiirust. Töötsükli (ON-aja) muutmisel saame muuta kiirust. Väljundporte vahetades muudab see tõhusalt mootori suunda.
Kiiruskontroll
BLDC mootori kiiruse reguleerimine on hädavajalik, et mootor töötaks soovitud kiirusega. Harjadeta alalisvoolumootori kiirust saab reguleerida sisendpinge alalisvoolu juhtimisega. Mida suurem on pinge, seda suurem on kiirus. Kui mootor töötab tavarežiimis või töötab alla nimikiiruse, muudetakse armatuuri sisendpinge PWM mudeli kaudu. Kui mootorit kasutatakse üle nimikiiruse, nõrgendatakse voogu väljuva voolu abil.
Kiiruse reguleerimine võib olla suletud või avatud kontuuriga kiiruse reguleerimine.
Avatud ahela kiiruse reguleerimine - see hõlmab lihtsalt mootori klemmidele rakendatava alalispinge juhtimist alalispinge tükeldamise teel. Selle tulemuseks on siiski mingisugune voolu piiramine.
Suletud tsükli kiiruse juhtimine - See hõlmab sisendtoite pinge juhtimist mootori kiiruse tagasiside kaudu. Seega juhitakse toitepinget sõltuvalt veasignaalist.
Suletud ahelaga kiiruse juhtimine koosneb kolmest põhikomponendist.
- PWM-ahel vajalike PWM-impulsside genereerimiseks. See võib olla kas mikrokontroller või taimeri IC.
- Sensor mootori tegeliku kiiruse tajumiseks. See võib olla saali efekti andur, infrapunaandur või optiline kooder.
- Mootori ajam mootori töö juhtimiseks.
See toitepinge muutmise veasignaalil põhinev tehnika võib toimuda kas pid-juhtimistehnika abil või uduse loogika abil.
Rakendus harjadeta alalisvoolumootori kiiruse reguleerimiseks

BLDC alalisvoolumootori juhtimine
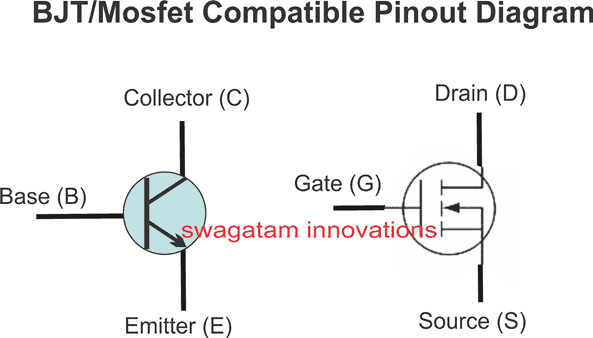
Mootori tööd juhitakse optroni ja MOSFET-i abil, kus alalisvoolu sisendvõimsust juhitakse mikrokontrollerist PWM-tehnika abil. Mootori pöörlemisel valgustub selle võlli juures olev infrapuna-led valge valgusega, kuna selle võllil on valge laik, ja peegeldab infrapunavalgust. Fotodiood võtab vastu selle infrapunavalguse ja selle takistus muutub, põhjustades seeläbi ühendatud transistori toitepinge muutuse ja mikrokontrollerile antakse impulss, et tekitada pöörete arv minutis. See kiirus kuvatakse LCD-ekraanil.
Nõutav kiirus sisestatakse mikrokontrolleriga liidetud klaviatuurile. Tajutatava kiiruse ja soovitud kiiruse vahe on veasignaal ja mikrokontroller genereerib hägusa loogika põhjal PWM-signaali vastavalt veasignaalile, et anda alalisvoolu sisend mootorile.
Seega saab suletud ahelaga juhtimise abil juhtida harjadeta alalisvoolumootori kiirust ja panna see pöörlema mis tahes soovitud kiirusel.
Foto krediit:




![4 lihtsat klapilüliti ahelat [testitud]](https://electronics.jf-parede.pt/img/4017-ic-circuits/21/4-simple-clap-switch-circuits.png)



{kind=link}