See kasulik kergekaaluline tahhomeetri analoogahel on välja töötatud autode või hooldustööde mehaanika hõlbustamiseks, et auto süütesüsteemi pöörete arvu täpselt reguleerida, et see maksimaalselt tõhusaks saada. Kavandatud vooluahel on tegelikult a tahhomeeter ja elamuarvesti.
Rakendus
Analoogset tahhomeetri vooluahelat saab kasutada süüteaja analüüsimiseks mitme p / min juures koos ajastuslambiga. Kui vooluahelat kasutatakse peatumismõõturi kujul, saab seda kasutada süütepulsi sisselülitamise nurga lugemiseks ja seega võib see anda automaatikale vajalikku teavet CDI-ahela ajastuse reguleerimise kohta.
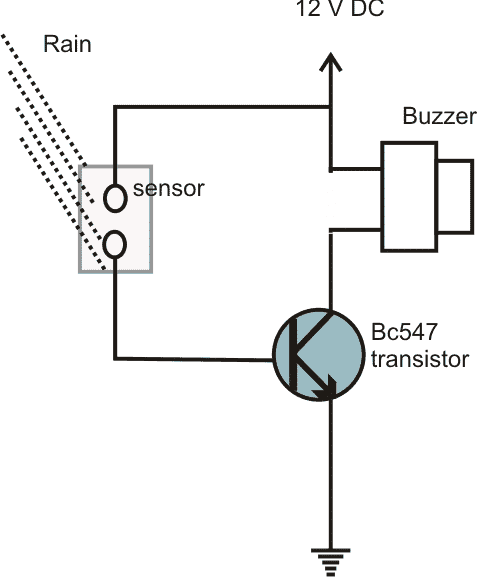
Täielik konfiguratsioon on näidatud alloleval joonisel ja on mõeldud autodele või negatiivse maandussüsteemiga autodele, mis on enamikul kaasaegsetest autodest.
Ideed saab kohandada ka positiivsete maasõidukite jaoks, ühendades kõik dioodid ja elektrolüütkondensaatorid vastupidise polaarsusega ning asendades PNP transistorid NPN-iga ja vastupidi. Vooluahelat toidetakse läbi auto akutoiteallika enda. Vooluringi tööd saab mõista järgmiste punktidega:
Kuidas vooluring töötab

Palun vahetage skeemis valesti orienteeritud T7 emitteri / kollektori tihvtid
Transistorid T1 ja T2 on varustatud Schmitti päästikuna. Niikaua kui vastuvõturulli sisendis positiivset impulsi ei tuvastata, jääb T1 välja lülitatuks ja T2 lülitatakse sisse, mis tähendab, et lisaks on T4 sisse lülitatud. See põhjustab positiivse pinge, mis vastab aku toitepingele, millest lahutatakse T4 emitteri baas-emitteri pinge.
Kui aga vastuvõtupoolist genereeritakse positiivne impulss, aktiveeritakse T1 ja Schmitti päästik vahetab vastupidist suunda.
T4 on selles punktis välja lülitatud, põhjustades selle emitteris oleva pinge nulli. Keskmine pinge T4 emitteris on seetõttu proportsionaalne vastuvõturulli sisse / välja lülitamise aja suhtega, st või teisisõnu, selle pinge väärtuse määrab peatumisnurk.
Kui lüliti S1 on a-asendis, sõltub keskmine arvesti kaudu kulgev vool ka peatumisnurgast, seega võib arvestit astmelise nurga suhtes gradueerida.
Kui lüliti on asendis „b”, töötab vooluring lihtsalt nagu tahhomeeter. C2 töötab nagu T3 kollektorist pärinevate impulsside diferentsiaator ja saadud väljundit kasutatakse transistoride T5 ja T6 ümber ehitatud monostabiilse astme aktiveerimiseks.
Monostabiil tekitab püsiva PWM väljundi, kuid kui mootori pöörete arv suureneb, tõuseb ka impulsside töötsükkel. T7 emitteri keskmine pinge ja seega arvesti kaudu kulgev keskmine vool sõltub nüüd impulsi ja pulsita perioodi suhtest. See tähendab, et kuna pöörete arv tõuseb ja impulsside laius laieneb, suureneb lineaarselt ka arvesti kaudu vool.
Kuidas kalibreerida
Seadet saab kalibreerida järgmiselt: Kui S1 on asendis „a”, ühendage sisend R1 maandusjoonega ja seejärel häälestage P1, et saada arvesti täisskaala läbipainde. See muutub samaväärseks 360 ° ootenurgaga ja skaalat saab kalibreerida lineaarselt 0 kuni 360 kraadi.
Tahhomeetri skaala tuleb kalibreerida täisskaalaga nii, et see vastaks suurimale optimaalsele p / min. Enamiku rakenduste jaoks võib 8000 olla lihtsalt piisav.
Kui tööriista tuleb rakendada nelja- ja kuuesilindrilistele mootoritele, võib sel juhul vaja minna kas paari skaalat või võib S1 asendada 3-pooluselise lülitiga ja P2 tuleb korrata, et see vastaks ühele skaalale erinevate mootorivahemike jaoks. Seda seetõttu, et kuuesilindriline mootor tekitab konkreetse p / min jaoks proportsionaalselt palju rohkem impulsse
Seadet oli võimalik kalibreerida näidatud trafo / sillalülituse abil, mis tekitab 100 Hz lainekuju.

100 Hz sagedus muutub samaväärseks 3000 p / min. nelja silindrilise mootori puhul ja 2000 p / min kuuesilindrilise mootori jaoks. Selle vooluahela väljund on ühendatud tahhomeetri analoogseadme sisendiga ja P2 kohandatakse arvesti täpse läbipainde ja näidu optimeerimiseks.
Paari: Ksenooni Strobe valguse juhtimisahel Järgmine: 50-vatine siinuslaine UPS-ahel