IR lähedusandur on seade, mis tuvastab objekti või inimese olemasolu, kui see jääb andurist ettemääratud vahemikku peegeldunud infrapunakiirte kaudu.
Siin on selgitatud kolme kasulikku lähedussensori kontseptsiooni, esimene kontseptsioon põhineb tavalisel opamp LM358-l, teine IC-modemil LM567, mis toimib faasilukustatud silmuse põhimõttega, tagades tuvastamiseks väga täpse vastuse. Kolmas vooluring töötab üldlevinud IC 555 abil. Õppime neid igaüks samm-sammult selgitama.
Ülevaade
Siin on pikk andurite loend mis on täna turul saadaval.
Üks selline andur on lähedusandur.
Selles postituses hakkame lahti harutama, kuidas töötab lähedussensor ja mis annavad vajalikud teadmised selle projekti tegemiseks kodus. Nagu nimigi ütleb, tuvastab seade, kas objekt on sellest lähedal või kaugel. Neid saab kujundada erineval viisil.
Kuid kõige tavalisem meetod on üks põhineb INFRAPUNA kiirtel ja OPAMP. Selle seadme mõningaid tavalisi kasutusviise võib näha mobiiltelefonides, automaatsetes loputussüsteemides, automaatsetes kraanides, kätekuivatites ja kunagi langevatel robotitel.
Vajalikud komponendid
1. IR juhtis : Iga juhi kiirgamisel tekib elektromagnetkiirgus. Oma majapidamiskogemuse põhjal oleme tundnud LED-e, mis kiirgavad nähtavat valgust.
Kuid on ka mõned spetsiaalsed LED-id, mis kiirgavad infrapunakiiri. Nii nagu seal võivad olla nähtavad eri värvi juhid, kiirgavad IR-led ka erineva lainepikkusega kiired. Infrapunakiired võivad olla erineva lainepikkusega ja võivad omandada mis tahes nende lainealale kuuluva väärtuse.
Seega on väga oluline, et kasutatav IR-fotodiood peaks suutma tuvastada IR-juhi antud konkreetse INFRA RED lainepikkuse.

kaks. IR-FOTODIOD : See on eriline diooditüüp mis on ühendatud IR-kiirte tuvastamiseks vastupidises eelarvamuses . IR-kiirguse puudumisel on sellel väga kõrge takistus ja seda läbib praktiliselt nullvool.
Kuid kui IR-kiired sellele langevad, väheneb selle takistus ja kiirguse intensiivsusega proportsionaalne vool lastakse sellest läbi minna.
Seda fotodioodi omadust kasutatakse elektrisignaali genereerimiseks lähedusanduris IR-kiirte esinemise korral.

3. Op-amp (IC LM358) : Op-amp või operatsioonivõimendi on mitmeotstarbeline ic ja on elektroonikamaailmas väga austatud.
Selles projektis kasutatakse op-amp võrdlusena. LM358 IC-l on kaks op-amprit, mis tähendab, et saame teha kaks lähedusdetektorit, kasutades ainult ühte IC-d. Op-amp'i kasutamine ahelas on analoogsignaali teisendamine digitaalsignaaliks.


Neli. Eelseadistatud : Preset on põhimõtteliselt takisti, millel on kolm klemmi.
Eelseadistuse ülesanne on jagada kogu saadaolev pinge selliselt, et kasutaja saaks selle murdosale juurde pääseda. Peame lihtsalt seadma keskmise klemmi sobivasse asendisse.
Eelseade määrab läve pinge, mille ületades väljundpinge tuleks genereerida. Selle saab pea sobiva kruvikeeraja abil peaga pöörates käsitsi seada mis tahes väärtusele.

5. Punane juhatas : Olen oma projekti jaoks kasutanud punast ledi, kuid üldiselt võib kasutada mis tahes värvi juhtmeid. See toimib visuaalse signaalina, mis näitab, et takistus on piisavalt lähedale jõudnud.

6. Takistid : Kaks 220 oomi ja üks 10k oomi.
7. Toiteallikas : 5 v kuni 6v.
Kuidas see töötab
Lähedusanduri töö taga on põhimõte üsna lihtne. Tüüpilisel kontseptsioonil on kaks üksteisega paralleelset juhet - IR kiirgav led ja fotodiood.
Nad toimivad saatja-vastuvõtja paarina. Kui kiirguskiirte ette satub takistus, peegelduvad need tagasi ja vastuvõtja saab neist kinni.
Vastavalt fotodioodi omadustele vähendavad pealtkuulatud IR-kiired fotodioodi takistust ja sellest tulenev elektrisignaal genereeritakse. See signaal on praktikas pinge 10 k takistil, mis juhitakse otse op-amp-i inverteerimata otsa.

Op-amp funktsioon on võrrelda talle antud kahte sisendit.
Fotodioodi signaal antakse mitteinverteerivale tihvtile (tihvt 3) ja potentsiomeetri lävipinge antakse inverteerivale tihvtile (tihvt 2). Kui pinge mitteinverteeriva tihvti juures on suurem kui pöördnõelaga on op-amp väljund kõrge, vastasel juhul on väljund madal.
Kokkuvõttes muudab op-amp selles ahelas analoogsignaali digitaalsignaaliks.
VÄLJUNDID:
Anduri väljundit saab kasutada kahel kujul: ANALOG ja DIGITAL.
Digitaalne väljund on kas kõrge või madal. Lähedusanduri digitaalset väljundsignaali saab kasutada takistusi vältiva roboti liikumise peatamiseks. Niipea, kui takistus jõuab piisavalt lähedale, saab mootori peatamiseks signaali suunata otse mootori juhi sisendnõeltesse.
Analoogväljund on pidev väärtuste vahemik nullist mõne lõpliku väärtuseni. Sellist signaali ei saa otse mootorijuhtidele ja teistele lülitusseadmetele anda. Kõigepealt peavad mikrokontrollerid neid töötlema ja teisendama digitaalseks vormiks ADC ja mõne kodeerimise kaudu. See väljundvorm nõuab täiendavat mikrokontrollerit, kuid välistab op-amp.
Täisahelaga Digaram

VÄRSKENDA alates Administraator
Ülaltoodud vooluahela konstruktsiooni võiks ehitada ka tavalise ühe opamp IC 741 abil, nagu allpool näidatud:

Videoklipp
2) täpse läheduse detektori vooluring (päikesevalgusele immuunne)
Järgmises postituses selgitatakse täpset infrapuna (IR) põhinevat lähedusdetektori vooluringi, mis sisaldab usaldusväärset ja lollikindlat toimimist tagava IC LM567. See vooluring on päikesevalguse või mis tahes muu ümbritseva valguse suhtes immuunne ega mõjuta seda enne, kui andur võtab vastu häälestatud peegeldunud signaalid. Disain töötab ka takistuste detektorina.
Ringkontseptsioon
Leidsin selle kujunduse netist, otsides täpset ja usaldusväärset, kuid odavat lähedussensori vooluringi.
Vooluringist võib aru saada järgmise kirjelduse abil:
Viidates allpool näidatud infrapuna (IR) liikumisanduri ahelale, näeme konstruktsiooni, mis koosneb kahest peamisest etapist, millest üks hõlmab IC LM567, teine aga IC555.
Põhimõtteliselt IC LM567 saab vooluahela südameks, mis täidab ainult IR-sageduse genereerimise / edastamise funktsioone ja tuvastab ka selle.
Lisaks on IC-l sisemine faasilukustatud ahel, mis muudab selle sageduste tuvastamise ahela rakenduste jaoks väga usaldusväärseks.
See tähendab, et kui see on etteantud sagedusele lugenud ja lukustunud, lukustub selle tuvastustunnus sellele sagedusele ja seetõttu ei mõjuta ega röövita selle toimimist kõik muud hulkuvad häired, ükskõik kui tugev see ka pole.
Ahela töö
Sisemine ostsillaatori sagedus, mille määrab R3, C2, toidab IR-dioodi D274 läbi voolu juhitava astme, mis koosneb T1, R2-st. See sagedus otsustab kiibi keskse sageduse.
Ülaltoodud tingimustel saab IC seatud ja tsentreeritud ülaltoodud sagedusel, tekitades väljundpoldil nr 8 konstantse kõrge.
Mikrofoni sisendnõel # 3 ootab sageduse vastuvõtmist, mis võib olla täpselt võrdne ülaltoodud IC-i 'tsentreeritud' sagedusega.
Infrapunavastuvõtja või IC-i tihvti nr 3 külge ühendatud andur on täpselt selleks otstarbeks paigutatud.
Niipea kui LD274 infrapunakiir takistuse leiab, peegeldub selle kiir ja langeb sobivalt paigutatud detektordioodile BP104.
IR27 sagedus LD274-st läheb nüüd IC sisendnupule nr 3, kuna see sagedus on täpselt sama kui IC määratud kesktsagedus, tunneb IC selle ära ja vahetab väljundi koheselt kõrgelt LOW-le.
Ülalolev madal päästik IC 555 tihvti nr 2 juures, mis on konfigureeritud monostabiiliks, lülitab omakorda väljundi kõrgeks, põhjustades ühendatud alarmi.
Ülaltoodud tingimus püsib nii kaua, kuni infrapunaanduri / detektori katkestus püsib ja laseb kiirtel peegelduda. R9 ja C5 lisamisel on IC555 väljundil ühendatud helisignaalil teatav viivituse väljalülitamise tingimus ka pärast liikumise või takistuse eemaldumist.
Viivituse väljalülitamise efekti reguleerimiseks võib R9 ja C5 muuta vastavalt eelistusele.
Eespool selgitatud vooluahelat võib kasutada ka lähedusdetektori ja takistusdetektori vooluringidena.
Vooluringi skeem

Katseahel
Järgmine katseahel näitab, kuidas kontrollida LM567 infrapunapõhise põhiprojekti tulemusi. Skeemi saab näha allpool:

Nagu näete, on disaini sisse viidud ainult LM567 etapp, samas kui IC 555 etapp on kõrvaldatud, et hoida põhilisi testimisprotseduure lihtsamaks.
Siin põleb punane valgusdioodi tihvti nr 8 juures ja jääb põlema seni, kuni IR-valgusdioodid hoitakse üksteisega paralleelselt 1 jala kaugusel.
Kui proovite asendada Tx infrapuna punase saatja LED mõne muu erineva sagedusega välise allikaga, lõpetab LM567 signaalide tuvastamise ja punane LED lõpetab hõõgumise.
Fotodioodid pole üliolulised, saatja ja vastuvõtja LED-ide jaoks võite kasutada mis tahes sarnaseid või standardseid fotodioode.
Videoklipp ülaltoodud testi jaoks:
3) Teine IC 567-l põhinev lähedusanduri disain
Täpselt nagu ülalpool, on selle vooluahela eripära see, et seda ei saa otsese IR-kiirguse abil aktiveerida ega ragistada, vaid ainult detektorit tabav peegeldunud IR-kiirgus käivitab vooluahela.


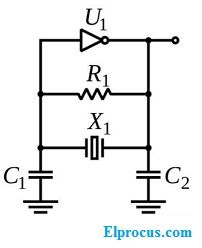
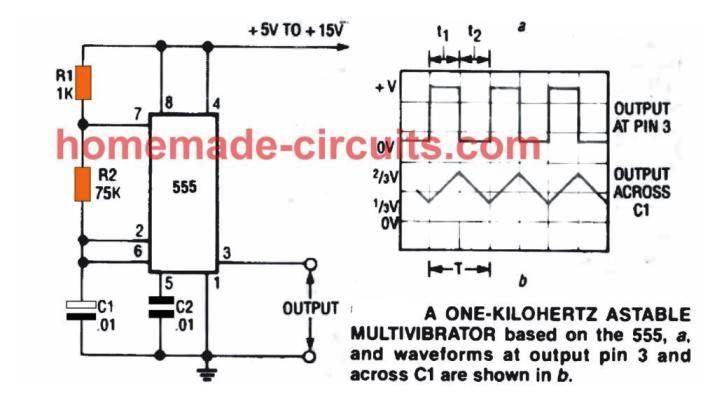
Vooluahela keskel on üksik 567 tooniga dekooder IC (U1), mis teostab kaksikut funktsionaalsust: see töötab nii põhilise IR-saatja draiveri kui ka vastuvõtjana. Kondensaatorit C1 ja takistit R2 kasutatakse U1 sisemise ostsillaatori sageduse fikseerimiseks umbes 1 kHz-le.
U1 ruutlaine väljund tihvti 5 korral rakendatakse Q1 alusele. Transistor Q1 on seatud emitter-järgija võimendiks, mis ühendab LED2 anoodil 20 mA impulsi.
Transistor Q3 võtab LED2-lt IR-väljundi üles ja suunab jõuülekande Q2-le edasiseks võimendamiseks. Pärast võimendust Q2 abil suunatakse signaal tagasi tihvti 3 U1 sisendisse, käivitades tihvti 8 madalaks, lülitades sisse LED1.
Vajadusel võib LED1 asendada praktiliselt igasuguse vahelduvvoolu abil töötava koormuse ümberlülitamisega optroniga. Kuna vooluring on väga lihtne, töötab peaaegu iga kujundusplaan.
Infrapunakiirguse emitter (LED1) ja fototransistor (03) tuleb paigaldada umbes tolli eraldatuna üksteise kõrvale ja fokuseerida täpselt samale rajale.
Võib osutuda vajalikuks katsetada infrapunaseadmete paari vahekaugust ja paigaldamise vaatepunkti, et selgitada välja detektori ja emitteri vaheliste määratud vahemike ideaalne asend.
Rusikareeglina võimaldab IR-kiirgaja / detektori paari vaheline tolline vahe lähedusahelal leida sihtmärgi umbes poole kuni 1-tollise vahega. Heledamad varjutatud sihtmärgid peegeldavad palju paremini ja suudavad töötada suuremal kaugusel kui need, mis on loodud sügavamatest elementidest. Niikaua kui lähedusandur võtab häälestatud IR-signaalid üles, lülitatakse juhitav vooluahel sisse ja niipea, kui signaal kaob, lülitub väljund välja.
4) Lähedetektor IC 555 ahelat kasutades
Selles kolmandas konstruktsioonis käsitleme lihtsat IC 555-l põhinevat lähedusdetektori vooluringi, mida saab kasutada inimese üleastumise tuvastamiseks kaugusest.
Ahela töö
Infrapuna lähidetektorit võib pidada üheks kõige väärtuslikumaks ja laialdasemalt kasutatavaks ahelaks elektroonilise automaatika rakenduste vahemikus.
Tüüpiliselt näeme, et seda kasutatakse automaatsetes veeautomaatides, automaatse kätekuivati seadmetes ja mõningaid konkreetseid variante võib näha kaubamajade automaatsetes ustes.
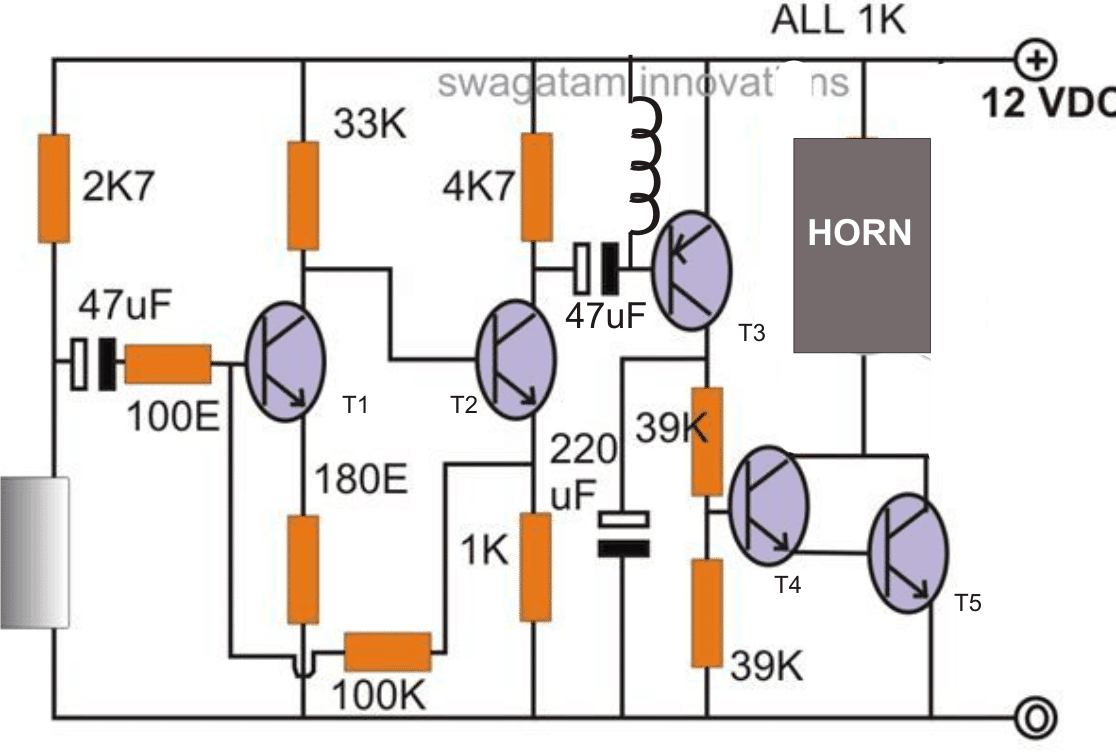
IC 555 abil kavandatud lähedusdetektori vooluahela tööpõhimõte
Konstruktsioonis viiakse IC LM555-st tipppingeimpulsside kiirete purskete genereerimine suhteliselt madalama sagedusega, mis edastatakse infrapuna-LED-i kaudu IR-kiirte joadena.
Need edastatud impulsid on suunatud sellele piirkonnale, mida on vaja jälgida, ja peegelduvad tagasi, kui subjekt või sissetungija tuvastatakse fototransistori dioodi kohal, mis on nende peegelduvate signaalide vastuvõtmiseks strateegiliselt paigutatud.
Kui see juhtub, läbivad vastuvõetud signaalid töötlemise, et võimaldada ühendatud releemehhanismi ja seejärel alarmseadme aktiveerimist.
Ülaltoodud teostuse testimiseks võib infrapunakiirte tsooni sisestada objekti ja reageerimist kontrollida relee toimimise jälgimisega, näiteks käe liigutamisega fokuseeritud alal umbes 1 meetri kaugusele.
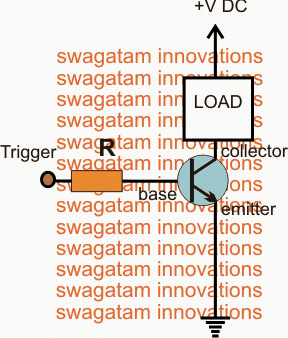
Kui peegeldunud signaalid tabavad fototransistorit, tekitab see potentsiaalse erinevuse 1M potis (reguleeritav) ja käivitab sellega seotud Darlingtoni etapi, mis omakorda aktiveerib parempoolse 555 astme, mis on konfigureeritud monostabiilse vooluringina.
Relee aktiveeritakse sellele reageerides ja jääb SISSE sõltuvalt 1M ja 10uF kondensaatori määratud monostabiilsest ettemääratud viivitusest.
Vooluringi skeem

Osade loend kavandatavale IC 555-l põhinevale IR-detektori ahelale.
2 - IC LM 555
2 - IC pesad 8 pin
1 - relee 12 V 5 kontakti
1 - Infrapuna fototransistor üldotstarbeline

1 - Infrapuna diood üldotstarbeline
3-- BC547
2 - kondensaatorid. 10 uF / 50 V
1–1N4148 diood
1– punane led 5mm
1-68 H
1–1K5
2–10 000
1–100 000
1–470 R H Kõik 1/2 W
1–10k 1/4 w takisti ühendatakse 1M eelseadistatud keskjuhtme ja BC547 paari vahele
IC 555 kinnitusdetailid

Eelmine: Tehke see Buck Converter Arduino abil Järgmine: SMS-põhine pumba regulaator koos automaatse kuivkäivituse väljalülitamisega