Vooluahelat, mis võimaldab ühendatud mootoril töötada alternatiivsete sisend-päästikute kaudu päripäeva ja vastupäeva, nimetatakse kahesuunaliseks kontrolleriks.
Esimeses allpool toodud konstruktsioonis käsitletakse täissillal või H-sillal põhinevat kahesuunalise mootori kontrolleri vooluahelat, kasutades IC LM324 nelja opampi. Teises artiklis saame teada suure pöördemomendiga kahesuunalise mootori regulaatori vooluahela kohta IC 556 abil
Sissejuhatus
Üldiselt mehaanilised lülitid on harjunud alalisvoolumootori pöörlemissuunda reguleerima. Kasutatava pinge ja mootori polaarsuse reguleerimine pöörleb vastupidises suunas!
Ühest küljest võib sellel olla puudus, et pinge polaarsuse muutmiseks tuleb lisada DPDT-lüliti, kuid oleme tegelenud ainult lülitiga, mis muudab protseduuri üsna lihtsaks.
Kuid DPDT-l võib olla üks tõsine probleem, pole soovitatav pöörata alalisvoolumootori pinget selle pöörlemisliikumise ajal järsult ümber. Selle tulemuseks võib olla praegune piik, mis võib sellega seotud kiiruse regulaatori põletada.
Lisaks võib igasugune mehaaniline pinge põhjustada ka sarnaseid probleeme. See vooluahel võidab neid tüsistusi lihtsalt. Suunda ja kiirust manipuleeritakse üksildase potentsiomeetri abil. Poti pööramine kindlaksmääratud suunas põhjustab mootori pöörlemist.
Poti vastassuunas ümberlülitamine võimaldab mootoril tagurpidi liikuda. Poti keskmine asend lülitab mootori VÄLJAS, tagades, et mootor kõigepealt aeglustub ja seejärel peatub, enne kui püütakse suuna muuta.
Tehnilised kirjeldused
Pinge: Vooluahel ja mootor kasutavad ühist toiteallikat. See tähendab, et kuna LM324 on 32 VDC, muutub see ka mootori käitamiseks maksimaalseks juurdepääsetavaks pingeks.
Praegune: IRFZ44 MOSFET on mõeldud 49A jaoks, IRF4905 saab hakkama 74A-ga. Sellest hoolimata saavad MOSFET-tihvtidest kruviklemmiplokini kulgevad PCB-rajad lihtsalt umbes 5A. Seda saaks parandada vasktraaditükkide jootmisega üle trükkplaadi radade.
Sellisel juhul veenduge, et MOSFETid ei muutuks liiga kuumaks - kui nad seda teevad, on vaja nendesse seadmetesse paigaldada suuremad jahutusradiaatorid.
LM324 kinnitusdetailid

LM324-d kasutavate alalisvoolumootorite kahesuunaline juhtimine
Põhimõtteliselt leiate 3 viisi reguleerida alalisvoolumootorite pöörlemiskiirust :
1. Kasutades ideaalse kiirenduse saavutamiseks mehhaniseeritud käike: See lähenemine ületab sageli enamuse kodutöökodades harjutavate entusiastide mugavust.
kaks. Mootori pinge vähendamine läbi jadatakisti. See võib olla kindlasti ebaefektiivne (võimsus hajub takistis) ja põhjustada ka pöördemomendi vähenemist.
Samuti suureneb mootori tarbitav vool, kui mootori koormus suureneb. Suurenenud vool tähendab suuremat pingelangust jadatakisti kohal ja seega mootori pinge langust.
Seejärel tõmbab mootor pingutades veelgi suuremat vooluhulka, põhjustades mootori seiskumise.
3. Rakendades mootorile kogu toitepinge lühikeste impulssidena: See meetod vabaneb seeria kukutamisefektist. Seda nimetatakse impulsi laiuse modulatsiooniks (PWM) ja see on selles vooluringis leitud strateegia. Kiired impulsid võimaldavad mootoril töötada aeglaselt, pikendatud impulsid võimaldavad mootoril kiiremini töötada.

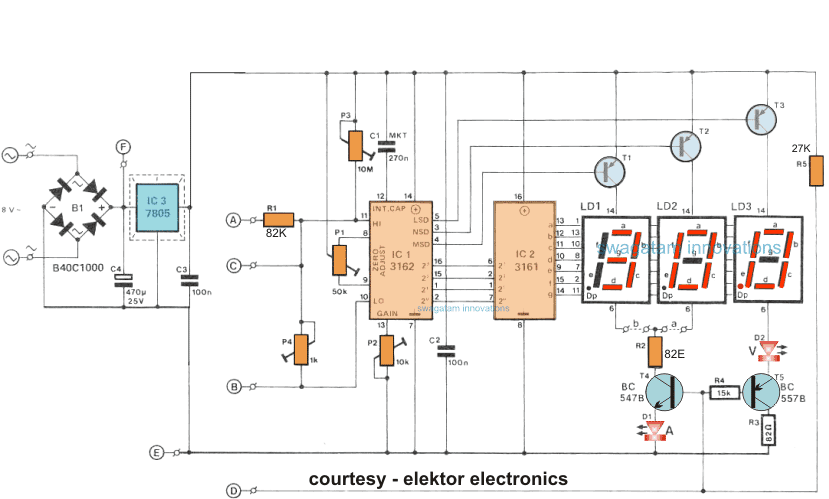
KUIDAS SEE FUNKTSIOONID (vt skeemi)
Vooluringi võiks jagada nelja etappi:
1. Mootori juhtimine - IC1: A
2. Kolmnurga laine generaator - IC1: B
3. Pingevõrdlejad - IC1: C ja D
4. Mootor ajam - Q3-6
Alustame mootorijuhi etapiga, mis keskendub MOSFET-ide Q3-6 ümber. Ainult paar neist MOSFETidest jäävad aktiveeritud olekusse igal ajahetkel. Kui Q3 ja Q6 on SEES, liigub vool läbi mootori ja põhjustab selle pöörlemise ühes suunas.
Niipea, kui Q4 ja Q5 on töökorras, muutub praegune ringlus vastupidiseks ja mootor hakkab pöörlema vastupidises suunas. IC1: C ja IC1: D käsitlevad MOSFETide sisselülitamist.
Opampid IC1: C ja IC1: D on juhtmega ühendatud pinge võrdlustena. Nende opampide võrdluspinge saadakse takisti pingejaguri R6, R7 ja R8 abil.
Pange tähele, et IC1: D võrdluspinge on ühendatud sisendiga +, kuid IC1: C puhul on see ühendatud sisendiga - -.
See tähendab, et IC1: D on aktiveeritud pingega, mis on suurem kui tema referents, samas kui IC1: C käivitatakse pingega, mis on madalam kui tema võrdlus. Opamp IC1: B on konfigureeritud kolmnurga laine generaatorina ja edastab aktiveerimissignaali vastavatele pinge võrdlejatele.
Kasutatavate väärtuste korral on sagedus R5 ja C1 - 270Hz ajakonstandi pöördväärtus.
R5 või C1 vähenemine suurendab sagedust, suurendades kumbagi neist, väheneb sagedus. Kolmnurga laine tipp-tipp väljundtase on palju väiksem kui kahe pinge võrdluse erinevus.
Seetõttu on mõlemal võrdlusalusel korraga keeruline aktiveeruda. Või siis hakkaksid kõik 4 MOSFET-i juhtima, mis tooks kaasa lühise ja rikuks need kõik.
Kolmnurga lainekuju on üles ehitatud alalisvoolu nihke pinge ümber. Nihkepinge suurendamine või vähendamine muudab kolmnurga impulsi positsiooni sobivalt.
Kolmnurga laine ülespoole lülitamine võimaldab komparaatori IC1: D aktiveerimist vähendamisel, mille tulemuseks on komparaatori IC1: C aktiveerimine. Kui kolmnurga laine pinge on kahe pinge võrdluse keskel, ei indutseerita ühtegi võrdlust. Alalisvoolu nihke pinget reguleerib potentsiomeeter P1 IC1: A kaudu, mis on mõeldud pinge järgijana.
See annab madala väljundtakistusega pingeallika, mis võimaldab alalisvoolu nihkepingel olla vähem haavatav IC1: B koormusmõju suhtes.
Kui pott on sisse lülitatud, hakkab alalisvoolu nihkepinge muutuma kas üles või alla vastavalt poti pööramise suunale. Diood D3 pakub regulaatorile vastupidise polaarsuse kaitset.
Takisti R15 ja kondensaator C2 on lihtne madalpääsfilter. See on ette nähtud MOSFETide poolt tekitatud pinge tõusude puhastamiseks, kui need lülitavad mootori toiteallika sisse.
Osade nimekiri

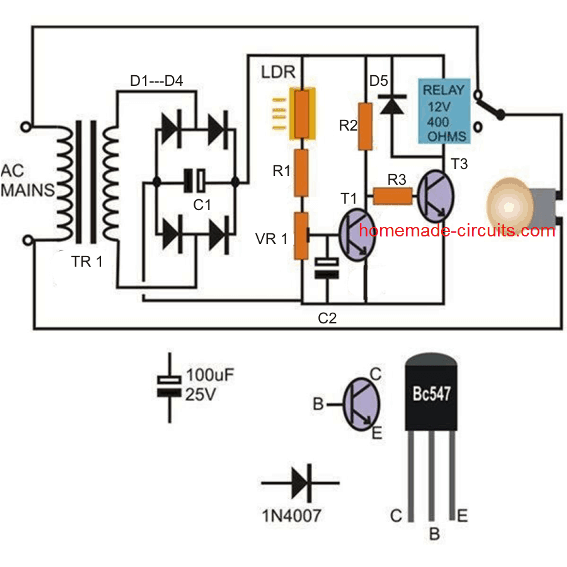
2) mootori kahesuunaline juhtimine IC 556 abil
Alalisvoolumootorite pöörlemiskiirust ja kahesuunalist juhtimist on suhteliselt lihtne rakendada. Iseseisvalt pingestatud mootorite puhul on kiirus põhimõtteliselt toitepinge lineaarne funktsioon. Püsimagnetiga mootorid on iseseisvalt pingestatud mootorite alamkategooria ja neid kasutatakse sageli mänguasjades ja mudelites.
Selles vooluringis varieeritakse mootori toitepinget impulsi laiuse modulatsiooni (PWM) abil, mis tagab hea efektiivsuse ja suhteliselt suure pöördemomendi madalatel mootori pöörlemiskiirustel. Üks juhtimispinge 0 ja +10 V vahel võimaldab muuta mootori pöörlemiskiirust ja seda muuta nullist maksimumini mõlemas suunas.
Astable multivibraator IC on seadistatud 80 Hz ostsillaatoriks ja see määrab PWM-signaali sageduse. Praegune allikas T1 laeb ca. Selle kondensaatori saehamba pinget võrreldakse juhtpingega punktis 1C2, mis väljastab PWM-signaali puhvrisse N1-Na või NPN1. Darlingtonil põhinev mootorijuht on sildahel, mis suudab juhtida koormust kuni 4 amprit, tingimusel, et sisselaske vool jääb alla 5 amprini ja võimsustransistoridele T1 -T on tagatud piisav jahutus. Dioodid D1, D5 pakuvad kaitset mootori induktiivsete pingete eest. Lüliti S1 võimaldab mootori suuna koheselt ümber pöörata.

Piltide prototüüp



Eelmine: võimendi ahelate mõistmine Järgmine: Kuidas ühendada transistorid (BJT) ja MOSFET Arduinoga